Parabolas in Taxicab Geometry Everyone Knows What a Circle Looks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Exploding the Ellipse Arnold Good
Exploding the Ellipse Arnold Good Mathematics Teacher, March 1999, Volume 92, Number 3, pp. 186–188 Mathematics Teacher is a publication of the National Council of Teachers of Mathematics (NCTM). More than 200 books, videos, software, posters, and research reports are available through NCTM’S publication program. Individual members receive a 20% reduction off the list price. For more information on membership in the NCTM, please call or write: NCTM Headquarters Office 1906 Association Drive Reston, Virginia 20191-9988 Phone: (703) 620-9840 Fax: (703) 476-2970 Internet: http://www.nctm.org E-mail: [email protected] Article reprinted with permission from Mathematics Teacher, copyright May 1991 by the National Council of Teachers of Mathematics. All rights reserved. Arnold Good, Framingham State College, Framingham, MA 01701, is experimenting with a new approach to teaching second-year calculus that stresses sequences and series over integration techniques. eaders are advised to proceed with caution. Those with a weak heart may wish to consult a physician first. What we are about to do is explode an ellipse. This Rrisky business is not often undertaken by the professional mathematician, whose polytechnic endeavors are usually limited to encounters with administrators. Ellipses of the standard form of x2 y2 1 5 1, a2 b2 where a > b, are not suitable for exploding because they just move out of view as they explode. Hence, before the ellipse explodes, we must secure it in the neighborhood of the origin by translating the left vertex to the origin and anchoring the left focus to a point on the x-axis. -

2.3 Conic Sections: Ellipse
2.3 Conic Sections: Ellipse Ellipse: (locus definition) set of all points (x, y) in the plane such that the sum of each of the distances from F1 and F2 is d. Standard Form of an Ellipse: Horizontal Ellipse Vertical Ellipse 22 22 (xh−−) ( yk) (xh−−) ( yk) +=1 +=1 ab22 ba22 center = (hk, ) 2a = length of major axis 2b = length of minor axis c = distance from center to focus cab222=− c eccentricity e = ( 01<<e the closer to 0 the more circular) a 22 (xy+12) ( −) Ex. Graph +=1 925 Center: (−1, 2 ) Endpoints of Major Axis: (-1, 7) & ( -1, -3) Endpoints of Minor Axis: (-4, -2) & (2, 2) Foci: (-1, 6) & (-1, -2) Eccentricity: 4/5 Ex. Graph xyxy22+4224330−++= x2 + 4y2 − 2x + 24y + 33 = 0 x2 − 2x + 4y2 + 24y = −33 x2 − 2x + 4( y2 + 6y) = −33 x2 − 2x +12 + 4( y2 + 6y + 32 ) = −33+1+ 4(9) (x −1)2 + 4( y + 3)2 = 4 (x −1)2 + 4( y + 3)2 4 = 4 4 (x −1)2 ( y + 3)2 + = 1 4 1 Homework: In Exercises 1-8, graph the ellipse. Find the center, the lines that contain the major and minor axes, the vertices, the endpoints of the minor axis, the foci, and the eccentricity. x2 y2 x2 y2 1. + = 1 2. + = 1 225 16 36 49 (x − 4)2 ( y + 5)2 (x +11)2 ( y + 7)2 3. + = 1 4. + = 1 25 64 1 25 (x − 2)2 ( y − 7)2 (x +1)2 ( y + 9)2 5. + = 1 6. + = 1 14 7 16 81 (x + 8)2 ( y −1)2 (x − 6)2 ( y − 8)2 7. -

Chapter 10 Analytic Geometry
Chapter 10 Analytic Geometry Section 10.1 13. (e); the graph has vertex ()()hk,1,1= and opens to the right. Therefore, the equation of the graph Not applicable has the form ()yax−=142 () − 1. Section 10.2 14. (d); the graph has vertex ()()hk,0,0= and ()()−+−22 1. xx21 yy 21 opens down. Therefore, the equation of the graph has the form xay2 =−4 . The graph passes 2 −4 through the point ()−−2, 1 so we have 2. = 4 2 2 ()−=−−241a () 2 = 3. ()x +=49 44a = x +=±43 a 1 2 xx+=43 or +=− 4 3 Thus, the equation of the graph is xy=−4 . xx=−1 or =− 7 15. (h); the graph has vertex ()(hk,1,1=− − ) and The solution set is {7,1}−−. opens down. Therefore, the equation of the graph 2 4. (2,5)−− has the form ()xay+=−+141 (). 5. 3, up 16. (a); the graph has vertex ()()hk,0,0= and 6. parabola opens to the right. Therefore, the equation of the graph has the form yax2 = 4 . The graph passes 7. c through the point ()1, 2 so we have 8. (3, 2) ()2412 = a () 44= a 9. (3,6) 1 = a 2 10. y =−2 Thus, the equation of the graph is yx= 4 . 11. (b); the graph has a vertex ()()hk,0,0= and 17. (c); the graph has vertex ()()hk,0,0= and opens up. Therefore, the equation of the graph opens to the left. Therefore, the equation of the 2 has the form xay2 = 4 . The graph passes graph has the form yax=−4 . -

Vol 45 Ams / Maa Anneli Lax New Mathematical Library
45 AMS / MAA ANNELI LAX NEW MATHEMATICAL LIBRARY VOL 45 10.1090/nml/045 When Life is Linear From Computer Graphics to Bracketology c 2015 by The Mathematical Association of America (Incorporated) Library of Congress Control Number: 2014959438 Print edition ISBN: 978-0-88385-649-9 Electronic edition ISBN: 978-0-88385-988-9 Printed in the United States of America Current Printing (last digit): 10987654321 When Life is Linear From Computer Graphics to Bracketology Tim Chartier Davidson College Published and Distributed by The Mathematical Association of America To my parents, Jan and Myron, thank you for your support, commitment, and sacrifice in the many nonlinear stages of my life Committee on Books Frank Farris, Chair Anneli Lax New Mathematical Library Editorial Board Karen Saxe, Editor Helmer Aslaksen Timothy G. Feeman John H. McCleary Katharine Ott Katherine S. Socha James S. Tanton ANNELI LAX NEW MATHEMATICAL LIBRARY 1. Numbers: Rational and Irrational by Ivan Niven 2. What is Calculus About? by W. W. Sawyer 3. An Introduction to Inequalities by E. F.Beckenbach and R. Bellman 4. Geometric Inequalities by N. D. Kazarinoff 5. The Contest Problem Book I Annual High School Mathematics Examinations 1950–1960. Compiled and with solutions by Charles T. Salkind 6. The Lore of Large Numbers by P.J. Davis 7. Uses of Infinity by Leo Zippin 8. Geometric Transformations I by I. M. Yaglom, translated by A. Shields 9. Continued Fractions by Carl D. Olds 10. Replaced by NML-34 11. Hungarian Problem Books I and II, Based on the Eotv¨ os¨ Competitions 12. 1894–1905 and 1906–1928, translated by E. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Taxicab Space, Inversion, Harmonic Conjugates, Taxicab Sphere
TAXICAB SPHERICAL INVERSIONS IN TAXICAB SPACE ADNAN PEKZORLU∗, AYS¸E BAYAR DEPARTMENT OF MATHEMATICS-COMPUTER UNIVERSITY OF ESKIS¸EHIR OSMANGAZI E-MAILS: [email protected], [email protected] (Received: 11 June 2019, Accepted: 29 May 2020) Abstract. In this paper, we define an inversion with respect to a taxicab sphere in the three dimensional taxicab space and prove several properties of this inversion. We also study cross ratio, harmonic conjugates and the inverse images of lines, planes and taxicab spheres in three dimensional taxicab space. AMS Classification: 40Exx, 51Fxx, 51B20, 51K99. Keywords: taxicab space, inversion, harmonic conjugates, taxicab sphere. 1. Introduction The inversion was introduced by Apollonius of Perga in his last book Plane Loci, and systematically studied and applied by Steiner about 1820s, [2]. During the following decades, many physicists and mathematicians independently rediscovered inversions, proving the properties that were most useful for their particular applica- tions by defining a central cone, ellipse and circle inversion. Some of these features are inversion compared to the classical circle. Inversion transformation and basic concepts have been presented in literature. The inversions with respect to the central conics in real Euclidean plane was in- troduced in [3]. Then the inversions with respect to ellipse was studied detailed in ∗ CORRESPONDING AUTHOR JOURNAL OF MAHANI MATHEMATICAL RESEARCH CENTER VOL. 9, NUMBERS 1-2 (2020) 45-54. DOI: 10.22103/JMMRC.2020.14232.1095 c MAHANI MATHEMATICAL RESEARCH CENTER 45 46 ADNAN PEKZORLU, AYS¸E BAYAR [13]. In three-dimensional space a generalization of the spherical inversion is given in [16]. Also, the inversions with respect to the taxicab distance, α-distance [18], [4], or in general a p-distance [11]. -

Apollonius of Pergaconics. Books One - Seven
APOLLONIUS OF PERGACONICS. BOOKS ONE - SEVEN INTRODUCTION A. Apollonius at Perga Apollonius was born at Perga (Περγα) on the Southern coast of Asia Mi- nor, near the modern Turkish city of Bursa. Little is known about his life before he arrived in Alexandria, where he studied. Certain information about Apollonius’ life in Asia Minor can be obtained from his preface to Book 2 of Conics. The name “Apollonius”(Apollonius) means “devoted to Apollo”, similarly to “Artemius” or “Demetrius” meaning “devoted to Artemis or Demeter”. In the mentioned preface Apollonius writes to Eudemus of Pergamum that he sends him one of the books of Conics via his son also named Apollonius. The coincidence shows that this name was traditional in the family, and in all prob- ability Apollonius’ ancestors were priests of Apollo. Asia Minor during many centuries was for Indo-European tribes a bridge to Europe from their pre-fatherland south of the Caspian Sea. The Indo-European nation living in Asia Minor in 2nd and the beginning of the 1st millennia B.C. was usually called Hittites. Hittites are mentioned in the Bible and in Egyptian papyri. A military leader serving under the Biblical king David was the Hittite Uriah. His wife Bath- sheba, after his death, became the wife of king David and the mother of king Solomon. Hittites had a cuneiform writing analogous to the Babylonian one and hi- eroglyphs analogous to Egyptian ones. The Czech historian Bedrich Hrozny (1879-1952) who has deciphered Hittite cuneiform writing had established that the Hittite language belonged to the Western group of Indo-European languages [Hro]. -

Taxicab Geometry, Or When a Circle Is a Square
Taxicab Geometry, or When a Circle is a Square Circle on the Road 2012, Math Festival Olga Radko (Los Angeles Math Circle, UCLA) April 14th, 2012 Abstract The distance between two points is the length of the shortest path connecting them. In plane Euclidean geometry such a path is along the straight line connecting the two points. In contrast, in a city consisting of a square grid of streets shortest paths between two points are no longer straight lines (as every cab driver knows). We will explore the geometry of this unusual distance and play several related games. 1 René Descartes (1596-1650) was a French mathematician, philosopher and writer. Among his many accomplishments, he developed a very convenient way to describe positions of points on a plane. This method was very important for fu- ture development of mathematics and physics. We will start learning about this invention today. The city of Descartes is a plane that extends infinitely in all directions: The center of the city is marked by point O. • The horizontal (West-East) line going through O is called • the x-axis. The vertical (South-North) line going through O is called • the y-axis. Each house in the city is represented by a point which • is the intersection of a vertical and a horizontal line. Each house has an address which consists of two whole numbers written inside of parenthesis. 2 Example. Point A shown below has coordinates (2, 3). The first number tells you the distance to the y-axis. • The distance is positive if you are on the right of the y-axis. -

Parabola Error Evaluation Based on Geometry Optimizing Approxima- Tion Algorithm
Send Orders for Reprints to [email protected] The Open Automation and Control Systems Journal, 2014, 6, 277-282 277 Open Access Parabola Error Evaluation Based on Geometry Optimizing Approxima- tion Algorithm Lei Xianqing1,*, Gao Zuobin1, Wang Haiyang2 and Cui Jingwei3 1Henan University of Science and Technology, Luoyang, 471003, China 2Heavy Industries Co., Ltd, Luoyang, 471003, China 3Luoyang Bearing Science &Technology Co. Ltd, Luoyang, 471003, China Abstract: A more accurate evaluation for parabola errors based on Geometry Optimizing Approximation Algorithm (GOAA) is presented in this paper. Firstly, according to the least squares method, two parabola characteristic points are determined as reference points to form a series of auxiliary points according to a certain geometry shape, and then, as- sumption ideal auxiliary parabolas are reversed by the parabola geometric characteristic. The range distance of all given points to the assumption ideal parabolas are calculated by the auxiliary parabolas as supposed ideal parabolas, and the ref- erence points, the auxiliary points, reference parabola and auxiliary parabolas are reconstructed by comparing the range distances, the evaluation for parabola error is finally obtained after repeating this entire process. On the basis of 0.1 mm of a group of simulative metrical data, compared with the least square method, while the criteria of stop searching is 0.00001 mm, the parabola error value from this algorithm can be reduced by 77 µm. The result shows this algorithm realizes the evaluation of parabola with minimum zone, accurately and stably. Keywords: Error evaluation, geometry approximation, minimum zone, parabola error. 1. INTRODUCTION squares techniques, but the iterations of the calculations is relatively complex. -
Deriving Kepler's Laws of Planetary Motion
DERIVING KEPLER’S LAWS OF PLANETARY MOTION By: Emily Davis WHO IS JOHANNES KEPLER? German mathematician, physicist, and astronomer Worked under Tycho Brahe Observation alone Founder of celestial mechanics WHAT ABOUT ISAAC NEWTON? “If I have seen further it is by standing on the shoulders of Giants.” Laws of Motion Universal Gravitation Explained Kepler’s laws The laws could be explained mathematically if his laws of motion and universal gravitation were true. Developed calculus KEPLER’S LAWS OF PLANETARY MOTION 1. Planets move around the Sun in ellipses, with the Sun at one focus. 2. The line connecting the Sun to a planet sweeps equal areas in equal times. 3. The square of the orbital period of a planet is proportional to the cube of the semimajor axis of the ellipse. INITIAL VALUES AND EQUATIONS Unit vectors of polar coordinates (1) INITIAL VALUES AND EQUATIONS From (1), (2) Differentiate with respect to time t (3) INITIAL VALUES AND EQUATIONS CONTINUED… Vectors follow the right-hand rule (8) INITIAL VALUES AND EQUATIONS CONTINUED… Force between the sun and a planet (9) F-force G-universal gravitational constant M-mass of sun Newton’s 2nd law of motion: F=ma m-mass of planet r-radius from sun to planet (10) INITIAL VALUES AND EQUATIONS CONTINUED… Planets accelerate toward the sun, and a is a scalar multiple of r. (11) INITIAL VALUES AND EQUATIONS CONTINUED… Derivative of (12) (11) and (12) together (13) INITIAL VALUES AND EQUATIONS CONTINUED… Integrates to a constant (14) INITIAL VALUES AND EQUATIONS CONTINUED… When t=0, 1. -
Lines, Circles, and Parabolas 9
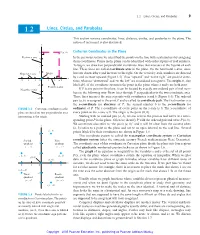
4100 AWL/Thomas_ch01p001-072 8/19/04 10:49 AM Page 9 1.2 Lines, Circles, and Parabolas 9 1.2 Lines, Circles, and Parabolas This section reviews coordinates, lines, distance, circles, and parabolas in the plane. The notion of increment is also discussed. y b P(a, b) Cartesian Coordinates in the Plane Positive y-axis In the previous section we identified the points on the line with real numbers by assigning 3 them coordinates. Points in the plane can be identified with ordered pairs of real numbers. 2 To begin, we draw two perpendicular coordinate lines that intersect at the 0-point of each line. These lines are called coordinate axes in the plane. On the horizontal x-axis, num- 1 Negative x-axis Origin bers are denoted by x and increase to the right. On the vertical y-axis, numbers are denoted x by y and increase upward (Figure 1.5). Thus “upward” and “to the right” are positive direc- –3–2 –1 01 2a 3 tions, whereas “downward” and “to the left” are considered as negative. The origin O, also –1 labeled 0, of the coordinate system is the point in the plane where x and y are both zero. Positive x-axis Negative y-axis If P is any point in the plane, it can be located by exactly one ordered pair of real num- –2 bers in the following way. Draw lines through P perpendicular to the two coordinate axes. These lines intersect the axes at points with coordinates a and b (Figure 1.5). -

Geometry of Some Taxicab Curves
GEOMETRY OF SOME TAXICAB CURVES Maja Petrović 1 Branko Malešević 2 Bojan Banjac 3 Ratko Obradović 4 Abstract In this paper we present geometry of some curves in Taxicab metric. All curves of second order and trifocal ellipse in this metric are presented. Area and perimeter of some curves are also defined. Key words: Taxicab metric, Conics, Trifocal ellipse 1. INTRODUCTION In this paper, taxicab and standard Euclidean metrics for a visual representation of some planar curves are considered. Besides the term taxicab, also used are Manhattan, rectangular metric and city block distance [4], [5], [7]. This metric is a special case of the Minkowski 1 MSc Maja Petrović, assistant at Faculty of Transport and Traffic Engineering, University of Belgrade, Serbia, e-mail: [email protected] 2 PhD Branko Malešević, associate professor at Faculty of Electrical Engineering, Department of Applied Mathematics, University of Belgrade, Serbia, e-mail: [email protected] 3 MSc Bojan Banjac, student of doctoral studies of Software Engineering, Faculty of Electrical Engineering, University of Belgrade, Serbia, assistant at Faculty of Technical Sciences, Computer Graphics Chair, University of Novi Sad, Serbia, e-mail: [email protected] 4 PhD Ratko Obradović, full professor at Faculty of Technical Sciences, Computer Graphics Chair, University of Novi Sad, Serbia, e-mail: [email protected] 1 metrics of order 1, which is for distance between two points , and , determined by: , | | | | (1) Minkowski metrics contains taxicab metric for value 1 and Euclidean metric for 2. The term „taxicab geometry“ was first used by K. Menger in the book [9].