Parabola Error Evaluation Based on Geometry Optimizing Approxima- Tion Algorithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Exploding the Ellipse Arnold Good
Exploding the Ellipse Arnold Good Mathematics Teacher, March 1999, Volume 92, Number 3, pp. 186–188 Mathematics Teacher is a publication of the National Council of Teachers of Mathematics (NCTM). More than 200 books, videos, software, posters, and research reports are available through NCTM’S publication program. Individual members receive a 20% reduction off the list price. For more information on membership in the NCTM, please call or write: NCTM Headquarters Office 1906 Association Drive Reston, Virginia 20191-9988 Phone: (703) 620-9840 Fax: (703) 476-2970 Internet: http://www.nctm.org E-mail: [email protected] Article reprinted with permission from Mathematics Teacher, copyright May 1991 by the National Council of Teachers of Mathematics. All rights reserved. Arnold Good, Framingham State College, Framingham, MA 01701, is experimenting with a new approach to teaching second-year calculus that stresses sequences and series over integration techniques. eaders are advised to proceed with caution. Those with a weak heart may wish to consult a physician first. What we are about to do is explode an ellipse. This Rrisky business is not often undertaken by the professional mathematician, whose polytechnic endeavors are usually limited to encounters with administrators. Ellipses of the standard form of x2 y2 1 5 1, a2 b2 where a > b, are not suitable for exploding because they just move out of view as they explode. Hence, before the ellipse explodes, we must secure it in the neighborhood of the origin by translating the left vertex to the origin and anchoring the left focus to a point on the x-axis. -

Chapter 10 Analytic Geometry
Chapter 10 Analytic Geometry Section 10.1 13. (e); the graph has vertex ()()hk,1,1= and opens to the right. Therefore, the equation of the graph Not applicable has the form ()yax−=142 () − 1. Section 10.2 14. (d); the graph has vertex ()()hk,0,0= and ()()−+−22 1. xx21 yy 21 opens down. Therefore, the equation of the graph has the form xay2 =−4 . The graph passes 2 −4 through the point ()−−2, 1 so we have 2. = 4 2 2 ()−=−−241a () 2 = 3. ()x +=49 44a = x +=±43 a 1 2 xx+=43 or +=− 4 3 Thus, the equation of the graph is xy=−4 . xx=−1 or =− 7 15. (h); the graph has vertex ()(hk,1,1=− − ) and The solution set is {7,1}−−. opens down. Therefore, the equation of the graph 2 4. (2,5)−− has the form ()xay+=−+141 (). 5. 3, up 16. (a); the graph has vertex ()()hk,0,0= and 6. parabola opens to the right. Therefore, the equation of the graph has the form yax2 = 4 . The graph passes 7. c through the point ()1, 2 so we have 8. (3, 2) ()2412 = a () 44= a 9. (3,6) 1 = a 2 10. y =−2 Thus, the equation of the graph is yx= 4 . 11. (b); the graph has a vertex ()()hk,0,0= and 17. (c); the graph has vertex ()()hk,0,0= and opens up. Therefore, the equation of the graph opens to the left. Therefore, the equation of the 2 has the form xay2 = 4 . The graph passes graph has the form yax=−4 . -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Apollonius of Pergaconics. Books One - Seven
APOLLONIUS OF PERGACONICS. BOOKS ONE - SEVEN INTRODUCTION A. Apollonius at Perga Apollonius was born at Perga (Περγα) on the Southern coast of Asia Mi- nor, near the modern Turkish city of Bursa. Little is known about his life before he arrived in Alexandria, where he studied. Certain information about Apollonius’ life in Asia Minor can be obtained from his preface to Book 2 of Conics. The name “Apollonius”(Apollonius) means “devoted to Apollo”, similarly to “Artemius” or “Demetrius” meaning “devoted to Artemis or Demeter”. In the mentioned preface Apollonius writes to Eudemus of Pergamum that he sends him one of the books of Conics via his son also named Apollonius. The coincidence shows that this name was traditional in the family, and in all prob- ability Apollonius’ ancestors were priests of Apollo. Asia Minor during many centuries was for Indo-European tribes a bridge to Europe from their pre-fatherland south of the Caspian Sea. The Indo-European nation living in Asia Minor in 2nd and the beginning of the 1st millennia B.C. was usually called Hittites. Hittites are mentioned in the Bible and in Egyptian papyri. A military leader serving under the Biblical king David was the Hittite Uriah. His wife Bath- sheba, after his death, became the wife of king David and the mother of king Solomon. Hittites had a cuneiform writing analogous to the Babylonian one and hi- eroglyphs analogous to Egyptian ones. The Czech historian Bedrich Hrozny (1879-1952) who has deciphered Hittite cuneiform writing had established that the Hittite language belonged to the Western group of Indo-European languages [Hro]. -
Lines, Circles, and Parabolas 9
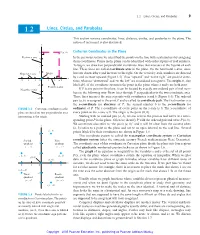
4100 AWL/Thomas_ch01p001-072 8/19/04 10:49 AM Page 9 1.2 Lines, Circles, and Parabolas 9 1.2 Lines, Circles, and Parabolas This section reviews coordinates, lines, distance, circles, and parabolas in the plane. The notion of increment is also discussed. y b P(a, b) Cartesian Coordinates in the Plane Positive y-axis In the previous section we identified the points on the line with real numbers by assigning 3 them coordinates. Points in the plane can be identified with ordered pairs of real numbers. 2 To begin, we draw two perpendicular coordinate lines that intersect at the 0-point of each line. These lines are called coordinate axes in the plane. On the horizontal x-axis, num- 1 Negative x-axis Origin bers are denoted by x and increase to the right. On the vertical y-axis, numbers are denoted x by y and increase upward (Figure 1.5). Thus “upward” and “to the right” are positive direc- –3–2 –1 01 2a 3 tions, whereas “downward” and “to the left” are considered as negative. The origin O, also –1 labeled 0, of the coordinate system is the point in the plane where x and y are both zero. Positive x-axis Negative y-axis If P is any point in the plane, it can be located by exactly one ordered pair of real num- –2 bers in the following way. Draw lines through P perpendicular to the two coordinate axes. These lines intersect the axes at points with coordinates a and b (Figure 1.5). -

14. Mathematics for Orbits: Ellipses, Parabolas, Hyperbolas Michael Fowler
14. Mathematics for Orbits: Ellipses, Parabolas, Hyperbolas Michael Fowler Preliminaries: Conic Sections Ellipses, parabolas and hyperbolas can all be generated by cutting a cone with a plane (see diagrams, from Wikimedia Commons). Taking the cone to be xyz222+=, and substituting the z in that equation from the planar equation rp⋅= p, where p is the vector perpendicular to the plane from the origin to the plane, gives a quadratic equation in xy,. This translates into a quadratic equation in the plane—take the line of intersection of the cutting plane with the xy, plane as the y axis in both, then one is related to the other by a scaling xx′ = λ . To identify the conic, diagonalized the form, and look at the coefficients of xy22,. If they are the same sign, it is an ellipse, opposite, a hyperbola. The parabola is the exceptional case where one is zero, the other equates to a linear term. It is instructive to see how an important property of the ellipse follows immediately from this construction. The slanting plane in the figure cuts the cone in an ellipse. Two spheres inside the cone, having circles of contact with the cone CC, ′, are adjusted in size so that they both just touch the plane, at points FF, ′ respectively. It is easy to see that such spheres exist, for example start with a tiny sphere inside the cone near the point, and gradually inflate it, keeping it spherical and touching the cone, until it touches the plane. Now consider a point P on the ellipse. -

Parabola Equations - Mathbitsnotebook(Geo - CCSS Math)
Parabola Equations - MathBitsNotebook(Geo - CCSS Math) https://mathbitsnotebook.com/Geometry/Equations/EQParabola.html Parabola Equations MathBitsNotebook.com Topical Outline | Geometry Outline | MathBits' Teacher Resources Terms of Use Contact Person: Donna Roberts A parabola is a conic section. It is a slice of a right cone parallel to one side (a generating line) of the cone. Like the circle, the parabola is a quadratic relation, but unlike the circle, either x will be squared or y will be squared, but not both. You worked with parabolas in Algebra 1 when you graphed quadratic equations. We will now be investigating the conic form of the parabola equation to learn more about the parabola's graph. A parabola is defined as the set (locus) of points that are equidistant from both the directrix (a fixed straight line) and the focus (a fixed point). This definition may be hard to visualize. Let's take a look. For ANY point on a parabola, the distance from that point to the focus is the same as the distance from that point to the directrix. (Looks like hairy spider legs!) Notice that the "distance" being measured to the directrix is always the shortest distance (the perpendicular distance). The focus is a point which lies "inside" the The specific distance from the vertex (the turning parabola on the axis of symmetry. The point of the parabola) to the focus is traditionally directrix is a line that is ⊥ to the axis of labeled "p". Thus, the distance from the vertex to the symmetry and lies "outside" the parabola directrix is also "p". -

3.2 Archimedes' Quadrature of the Parabola
3.2 Archimedes’ Quadrature of the Parabola 111 mere points for other functions to be defined on, a metalevel analysis with applications in quantum physics. At the close of the twentieth century, one of the hottest new fields in analysis is “wavelet theory,” emerging from such applications as edge de- tection or texture analysis in computer vision, data compression in signal analysis or image processing, turbulence, layering of underground earth sed- iments, and computer-aided design. Wavelets are an extension of Fourier’s idea of representing functions by superimposing waves given by sines or cosines. Since many oscillatory phenomena evolve in an unpredictable way over short intervals of time or space, the phenomenon is often better repre- sented by superimposing waves of only short duration, christened wavelets. This tight interplay between current applications and a new field of math- ematics is evolving so quickly that it is hard to see where it will lead even in the very near future [92]. We will conclude this chapter with an extraordinary modern twist to our long story. Recall that the infinitesimals of Leibniz, which had never been properly defined and were denigrated as fictional, had finally been banished from analysis by the successors of Cauchy in the nineteenth century, using a rigorous foundation for the real numbers. How surprising, then, that in 1960 deep methods of modern mathematical logic revived infinitesimals and gave them a new stature and role. In our final section we will read a few passages from the book Non-Standard Analysis [140] by Abraham Robinson (1918– 1974), who discovered how to place infinitesimals on a firm foundation, and we will consider the possible consequences of his discovery for the future as well as for our evaluation of the past. -
Lecture 11. Apollonius and Conic Sections
Lecture 11. Apollonius and Conic Sections Figure 11.1 Apollonius of Perga Apollonius of Perga Apollonius (262 B.C.-190 B.C.) was born in the Greek city of Perga, close to the southeast coast of Asia Minor. He was a Greek geometer and astronomer. His major mathematical work on the theory of conic sections had a very great influence on the development of mathematics and his famous book Conics introduced the terms parabola, ellipse and hyperbola. Apollonius' theory of conics was so admired that it was he, rather than Euclid, who in antiquity earned the title the Great Geometer. He also made contribution to the study of the Moon. The Apollonius crater on the Moon was named in his honor. Apollonius came to Alexandria in his youth and learned mathematics from Euclid's successors. As far as we know he remained in Alexandria and became an associate among the great mathematicians who worked there. We do not know much details about his life. His chief work was on the conic sections but he also wrote on other subjects. His mathematical powers were so extraordinary that he became known in his time. His reputation as an astronomer was also great. Apollonius' mathematical works Apollonius is famous for his work, the Conic, which was spread out over eight books and contained 389 propositions. The first four books were 69 in the original Greek language, the next three are preserved in Arabic translations, while the last one is lost. Even though seven of the eight books of the Conics have survived, most of his mathematical work is known today only by titles and summaries in works of later authors. -

The Parabola and the Circle
Math 0303 The Parabola and the Circle The following are several terms and definitions to aid in the understanding of parabolas. 1.) Parabola - A parabola is the set of all points (h, k) that are equidistant from a fixed line called the directrix and a fixed point called the focus (not on the line.) 2.) Axis of symmetry - A line passing through the focus and being perpendicular to the directrix. 3.) The standard equation of a parabola (with the vertex at the origin). a.) If the Y axis is the axis of symmetry. x2 = 4py; p ≠ 0 FOCUS: (0, p) DIRECTRIX: y = – p b.) If the X axis is the axis of symmetry. y2 = 4px; p ≠ 0 FOCUS: (p, 0) DIRECTRIX: x = – p Student Learning Assistance Center - San Antonio College 1 Math 0303 Example 1: Find the focus and directrix and graph the parabola whose equation is y = -2x2. Solution: Step 1: Analyze the problem. Since the quadratic term involves x, the axis is vertical and the standard form x2 = 4py is used. Step 2: Apply the formula. The given equation must be converted into the standard form. y =−2x2 y = x2 −2 1 x2 =− y 2 1 1 This means that 4 p = − or p = − . 2 8 ⎛⎞1 Therefore the focus (0, p) is and the directrix is ⎜⎟0, − 8 ⎝⎠ y =−p ⎛⎞1 y =−⎜⎟ − 8 ⎝⎠ 1 y = 8 Step 3: Graph. Student Learning Assistance Center - San Antonio College 2 Math 0303 There exists a line parallel to the directrix and passing through the focus called the primary focal chord, |4p|. -

1. Section 11.2 the Parabola Definition 1.1. a Parabola Is the Set
1. Section 11.2 The Parabola Definition 1.1. A parabola is the set of all points, P = (x; y), that are equidistant from a fixed point called the focus and a fixed line called the directrix. Theorem 1.1. (a > 0) If a parabola has vertex at the origin and. (1) focus at (0; a) and directrix at y = −a, then the equation for the parabola is x2 = 4ay (2) focus at (0; −a) and directrix at y = a, then the equation for the parabola is x2 = −4ay (3) focus at (a; 0) and directrix at x = −a, then the equation for the parabola is y2 = 4ax (4) focus at (−a; 0) and directrix at x = a, then the equation for the parabola is y2 = −4ax 1 Section 11.2 The Parabola 2 Example 1.1. (a) Make a rough sketch of the graph of the parabola with focus at (0; 3) and directrix at y = −3. (b) What if the focus is at (0; −3) and the directrix is at y = 3? Example 1.2. (a) Make a rough sketch of the graph of the parabola with focus at (3; 0) and directrix at x = −3. (b) What if the focus is at (−3; 0) and the directrix is at x = 3? Remark 1.1. The vertex and the focus lie on the axis of symmetry. The distance, a, from the vertex to the focus equals the distance from the vertex to the directrix. The vertex is midway between the focus and the directrix. Example 1.3. Find the directrix of the parabola given by y2 = 6x (A) x = 3=2 (B) x = −3=2 (C) y = 3=2 (D) y = −3=2 Section 11.2 The Parabola 3 Definition 1.2. -

Reflection Property of a Parabola
Reflection Property of a Parabola Reflection Property: Lines perpendicular to the directrix of a parabola reflect off the surface of the parabola and meet at its focus. The diagram at right illustrates this. In the diagram, the red lines approach the parabola from the right, reflect off its surface and meet at the focus. This is how satellite dishes and parabolic antennas work. A paraboloid (a 3D version of the parabola) provides a wide area from which to collect signals. The signals reflect off the paraboloid surface and meet at a receiver placed at its focus, thus significantly amplifying the signal. Similarly, the red lines could begin at the focus, radiate outward, reflect off the parabola to produce a wider signal. This is how headlights work. If you place a light source at the focus of a paraboloid, it will radiate outward in all directions, reflect off the paraboloid and produce a wide beam of light. Proof: Let’s prove the reflection property of a parabola. Part 1: We will use coordinate geometry for the first portion of the proof. We are free to place the parabola anywhere in the coordinate plane, so we set its vertex at the Origin and orient it to the right. This results in a parabola of the general form: . The diagram at right provides coordinates for key points relating to this parabola. For a parabola of this form, the focus is units to the right of the vertex and the Directrix is units to the left of the vertex. We construct a triangle (in red) with the following vertices: , the focus; , a point anywhere on the parabola; and , the point on the Directrix that makes perpendicular to the Directrix.