Improving Barge-In Performance on Smart Speakers with Ultra High
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Listen Only When Spoken To: Interpersonal Communication Cues As Smart Speaker Privacy Controls
Proceedings on Privacy Enhancing Technologies ; 2020 (2):251–270 Abraham Mhaidli*, Manikandan Kandadai Venkatesh, Yixin Zou, and Florian Schaub Listen Only When Spoken To: Interpersonal Communication Cues as Smart Speaker Privacy Controls Abstract: Internet of Things and smart home technolo- 1 Introduction gies pose challenges for providing effective privacy con- trols to users, as smart devices lack both traditional Internet of Things (IoT) and smart home devices have screens and input interfaces. We investigate the poten- gained considerable traction in the consumer market [4]. tial for leveraging interpersonal communication cues as Technologies such as smart door locks, smart ther- privacy controls in the IoT context, in particular for mostats, and smart bulbs offer convenience and utility smart speakers. We propose privacy controls based on to users [4]. IoT devices often incorporate numerous sen- two kinds of interpersonal communication cues – gaze sors from microphones to cameras. Though these sensors direction and voice volume level – that only selectively are essential for the functionality of these devices, they activate a smart speaker’s microphone or voice recog- may cause privacy concerns over what data such devices nition when the device is being addressed, in order to and their sensors collect, how the data is processed, and avoid constant listening and speech recognition by the for what purposes the data is used [35, 41, 46, 47, 70]. smart speaker microphones and reduce false device acti- Additionally, these sensors are often in the background vation. We implement these privacy controls in a smart or hidden from sight, continuously collecting informa- speaker prototype and assess their feasibility, usability tion. -

Personification and Ontological Categorization of Smart Speaker-Based Voice Assistants by Older Adults
“Phantom Friend” or “Just a Box with Information”: Personification and Ontological Categorization of Smart Speaker-based Voice Assistants by Older Adults ALISHA PRADHAN, University of Maryland, College Park, USA LEAH FINDLATER, University of Washington, USA AMANDA LAZAR, University of Maryland, College Park, USA As voice-based conversational agents such as Amazon Alexa and Google Assistant move into our homes, researchers have studied the corresponding privacy implications, embeddedness in these complex social environments, and use by specific user groups. Yet it is unknown how users categorize these devices: are they thought of as just another object, like a toaster? As a social companion? Though past work hints to human- like attributes that are ported onto these devices, the anthropomorphization of voice assistants has not been studied in depth. Through a study deploying Amazon Echo Dot Devices in the homes of older adults, we provide a preliminary assessment of how individuals 1) perceive having social interactions with the voice agent, and 2) ontologically categorize the voice assistants. Our discussion contributes to an understanding of how well-developed theories of anthropomorphism apply to voice assistants, such as how the socioemotional context of the user (e.g., loneliness) drives increased anthropomorphism. We conclude with recommendations for designing voice assistants with the ontological category in mind, as well as implications for the design of technologies for social companionship for older adults. CCS Concepts: • Human-centered computing → Ubiquitous and mobile devices; • Human-centered computing → Personal digital assistants KEYWORDS Personification; anthropomorphism; ontology; voice assistants; smart speakers; older adults. ACM Reference format: Alisha Pradhan, Leah Findlater and Amanda Lazar. -

Samrt Speakers Growth at a Discount.Pdf
Technology, Media, and Telecommunications Predictions 2019 Deloitte’s Technology, Media, and Telecommunications (TMT) group brings together one of the world’s largest pools of industry experts—respected for helping companies of all shapes and sizes thrive in a digital world. Deloitte’s TMT specialists can help companies take advantage of the ever- changing industry through a broad array of services designed to meet companies wherever they are, across the value chain and around the globe. Contact the authors for more information or read more on Deloitte.com. Technology, Media, and Telecommunications Predictions 2019 Contents Foreword | 2 Smart speakers: Growth at a discount | 24 1 Technology, Media, and Telecommunications Predictions 2019 Foreword Dear reader, Welcome to Deloitte Global’s Technology, Media, and Telecommunications Predictions for 2019. The theme this year is one of continuity—as evolution rather than stasis. Predictions has been published since 2001. Back in 2009 and 2010, we wrote about the launch of exciting new fourth-generation wireless networks called 4G (aka LTE). A decade later, we’re now making predic- tions about 5G networks that will be launching this year. Not surprisingly, our forecast for the first year of 5G is that it will look a lot like the first year of 4G in terms of units, revenues, and rollout. But while the forecast may look familiar, the high data speeds and low latency 5G provides could spur the evolution of mobility, health care, manufacturing, and nearly every industry that relies on connectivity. In previous reports, we also wrote about 3D printing (aka additive manufacturing). Our tone was posi- tive but cautious, since 3D printing was growing but also a bit overhyped. -

Smart Speakers & Their Impact on Music Consumption
Everybody’s Talkin’ Smart Speakers & their impact on music consumption A special report by Music Ally for the BPI and the Entertainment Retailers Association Contents 02"Forewords 04"Executive Summary 07"Devices Guide 18"Market Data 22"The Impact on Music 34"What Comes Next? Forewords Geoff Taylor, chief executive of the BPI, and Kim Bayley, chief executive of ERA, on the potential of smart speakers for artists 1 and the music industry Forewords Kim Bayley, CEO! Geoff Taylor, CEO! Entertainment Retailers Association BPI and BRIT Awards Music began with the human voice. It is the instrument which virtually Smart speakers are poised to kickstart the next stage of the music all are born with. So how appropriate that the voice is fast emerging as streaming revolution. With fans consuming more than 100 billion the future of entertainment technology. streams of music in 2017 (audio and video), streaming has overtaken CD to become the dominant format in the music mix. The iTunes Store decoupled music buying from the disc; Spotify decoupled music access from ownership: now voice control frees music Smart speakers will undoubtedly give streaming a further boost, from the keyboard. In the process it promises music fans a more fluid attracting more casual listeners into subscription music services, as and personal relationship with the music they love. It also offers a real music is the killer app for these devices. solution to optimising streaming for the automobile. Playlists curated by streaming services are already an essential Naturally there are challenges too. The music industry has struggled to marketing channel for music, and their influence will only increase as deliver the metadata required in a digital music environment. -

Microsoft Surface Duo Teardown Guide ID: 136576 - Draft: 2021-04-30
Microsoft Surface Duo Teardown Guide ID: 136576 - Draft: 2021-04-30 Microsoft Surface Duo Teardown An exploratory teardown of the Microsoft Surface Duo, a brand-new take on foldables with a surprisingly simple hinge but precious few concessions to repair. Written By: Taylor Dixon This document was generated on 2021-05-02 03:27:09 PM (MST). © iFixit — CC BY-NC-SA www.iFixit.com Page 1 of 16 Microsoft Surface Duo Teardown Guide ID: 136576 - Draft: 2021-04-30 INTRODUCTION Microsoft has reportedly been working on the Surface Duo for six years. We can probably tear it down in less time than that, but with any brand-new form factor, there are no guarantees. Here’s hoping the Duo boasts the repairability of recent Microsoft sequels like the Surface Laptop 3 or the Surface Pro X—otherwise, we could be in for a long haul. Let’s get this teardown started! For more teardowns, we’ve got a trio of social media options for you: for quick text we’ve got Twitter, for sweet pics there’s Instagram, and for the phablet of the media world there’s Facebook. If you’d rather get the full scoop on what we’re up to, sign up for our newsletter! TOOLS: T2 Torx Screwdriver (1) T3 Torx Screwdriver (1) T5 Torx Screwdriver (1) Tri-point Y000 Screwdriver (1) Spudger (1) Tweezers (1) Heat Gun (1) iFixit Opening Picks set of 6 (1) Plastic Cards (1) This document was generated on 2021-05-02 03:27:09 PM (MST). © iFixit — CC BY-NC-SA www.iFixit.com Page 2 of 16 Microsoft Surface Duo Teardown Guide ID: 136576 - Draft: 2021-04-30 Step 1 — Microsoft Surface Duo Teardown The long-awaited Surface Duo is here! For $1,400 you get two impossibly thin slices of hardware that you can fold up and put in your pocket.. -
Logarithmic Image Sensor for Wide Dynamic Range Stereo Vision System
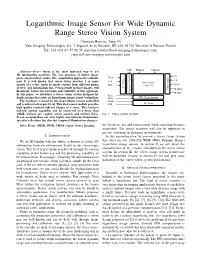
Logarithmic Image Sensor For Wide Dynamic Range Stereo Vision System Christian Bouvier, Yang Ni New Imaging Technologies SA, 1 Impasse de la Noisette, BP 426, 91370 Verrieres le Buisson France Tel: +33 (0)1 64 47 88 58 [email protected], [email protected] NEG PIXbias COLbias Abstract—Stereo vision is the most universal way to get 3D information passively. The fast progress of digital image G1 processing hardware makes this computation approach realizable Vsync G2 Vck now. It is well known that stereo vision matches 2 or more Control Amp Pixel Array - Scan Offset images of a scene, taken by image sensors from different points RST - 1280x720 of view. Any information loss, even partially in those images, will V Video Out1 drastically reduce the precision and reliability of this approach. Exposure Out2 In this paper, we introduce a stereo vision system designed for RD1 depth sensing that relies on logarithmic image sensor technology. RD2 FPN Compensation The hardware is based on dual logarithmic sensors controlled Hsync and synchronized at pixel level. This dual sensor module provides Hck H - Scan high quality contrast indexed images of a scene. This contrast indexed sensing capability can be conserved over more than 140dB without any explicit sensor control and without delay. Fig. 1. Sensor general structure. It can accommodate not only highly non-uniform illumination, specular reflections but also fast temporal illumination changes. Index Terms—HDR, WDR, CMOS sensor, Stereo Imaging. the details are lost and consequently depth extraction becomes impossible. The sensor reactivity will also be important to prevent saturation in changing environments. -

Receiver Dynamic Range: Part 2
The Communications Edge™ Tech-note Author: Robert E. Watson Receiver Dynamic Range: Part 2 Part 1 of this article reviews receiver mea- the receiver can process acceptably. In sim- NF is the receiver noise figure in dB surements which, taken as a group, describe plest terms, it is the difference in dB This dynamic range definition has the receiver dynamic range. Part 2 introduces between the inband 1-dB compression point advantage of being relatively easy to measure comprehensive measurements that attempt and the minimum-receivable signal level. without ambiguity but, unfortunately, it to characterize a receiver’s dynamic range as The compression point is obvious enough; assumes that the receiver has only a single a single number. however, the minimum-receivable signal signal at its input and that the signal is must be identified. desired. For deep-space receivers, this may be COMPREHENSIVE MEASURE- a reasonable assumption, but the terrestrial MENTS There are a number of candidates for mini- mum-receivable signal level, including: sphere is not usually so benign. For specifi- The following receiver measurements and “minimum-discernable signal” (MDS), tan- cation of general-purpose receivers, some specifications attempt to define overall gential sensitivity, 10-dB SNR, and receiver interfering signals must be assumed, and this receiver dynamic range as a single number noise floor. Both MDS and tangential sensi- is what the other definitions of receiver which can be used both to predict overall tivity are based on subjective judgments of dynamic range do. receiver performance and as a figure of merit signal strength, which differ significantly to compare competing receivers. -

For the Falcon™ Range of Microphone Products (Ba5105)
Technical Documentation Microphone Handbook For the Falcon™ Range of Microphone Products Brüel&Kjær B K WORLD HEADQUARTERS: DK-2850 Nærum • Denmark • Telephone: +4542800500 •Telex: 37316 bruka dk • Fax: +4542801405 • e-mail: [email protected] • Internet: http://www.bk.dk BA 5105 –12 Microphone Handbook Revision February 1995 Brüel & Kjær Falcon™ Range of Microphone Products BA 5105 –12 Microphone Handbook Trademarks Microsoft is a registered trademark and Windows is a trademark of Microsoft Cor- poration. Copyright © 1994, 1995, Brüel & Kjær A/S All rights reserved. No part of this publication may be reproduced or distributed in any form or by any means without prior consent in writing from Brüel & Kjær A/S, Nærum, Denmark. 0 − 2 Falcon™ Range of Microphone Products Brüel & Kjær Microphone Handbook Contents 1. Introduction....................................................................................................................... 1 – 1 1.1 About the Microphone Handbook............................................................................... 1 – 2 1.2 About the Falcon™ Range of Microphone Products.................................................. 1 – 2 1.3 The Microphones ......................................................................................................... 1 – 2 1.4 The Preamplifiers........................................................................................................ 1 – 8 1 2. Prepolarized Free-field /2" Microphone Type 4188....................... 2 – 1 2.1 Introduction ................................................................................................................ -

Smart Home Power Management Based on Internet of Things and Smart Sensor Networks
Sensors and Materials, Vol. 33, No. 5 (2021) 1687–1702 1687 MYU Tokyo S & M 2564 Smart Home Power Management Based on Internet of Things and Smart Sensor Networks Tzer-Long Chen,1 Tsan-Ching Kang,2 Chien-Yun Chang,3 Tsung-Chih Hsiao,4,5* and Chih-Cheng Chen,6,7** 1Department of Finance, Providence University, Taichung 43301, Taiwan 2College of Computing and Informatics, Providence University, Taichung 43301, Taiwan 3Department of Fashion Business and Merchandising, Ling Tung University, Taichung 40852, Taiwan 4College of Computer Science and Technology, Huaqiao University, Xiamen, Fujian 361021, China 5Xiamen Key Laboratory of Data Security and Blockchain Technology, Huaqiao University, Xiamen, Fujian 361021, China 6Department of Automatic Control Engineering, Feng Chia University, Taichung 40724, Taiwan 7Department of Aeronautical Engineering, Chaoyang University of Technology, Taichung 413310, Taiwan (Received October 21, 2020; accepted March 8, 2021) Keywords: smart home, Internet of Things, smartphone, app implementation, sensor networks We have developed a system that includes a newly designed smart socket for IoT sensors and a cloud platform for smart home power management. The system can initiate the platform service upon the user’s authentication and give suggestions based on the analysis of usage patterns. By sending data to the analysis system through the IoT, the system can recommend to the user the most suitable power management setting, calculate the power consumption requirement of the user, and determine whether it is within a reasonable range. The cloud platform employs a mobile device app, which adopts a graphical user interface. The app effectively provides users with information on their domestic power consumption. -

Signal-To-Noise Ratio and Dynamic Range Definitions
Signal-to-noise ratio and dynamic range definitions The Signal-to-Noise Ratio (SNR) and Dynamic Range (DR) are two common parameters used to specify the electrical performance of a spectrometer. This technical note will describe how they are defined and how to measure and calculate them. Figure 1: Definitions of SNR and SR. The signal out of the spectrometer is a digital signal between 0 and 2N-1, where N is the number of bits in the Analogue-to-Digital (A/D) converter on the electronics. Typical numbers for N range from 10 to 16 leading to maximum signal level between 1,023 and 65,535 counts. The Noise is the stochastic variation of the signal around a mean value. In Figure 1 we have shown a spectrum with a single peak in wavelength and time. As indicated on the figure the peak signal level will fluctuate a small amount around the mean value due to the noise of the electronics. Noise is measured by the Root-Mean-Squared (RMS) value of the fluctuations over time. The SNR is defined as the average over time of the peak signal divided by the RMS noise of the peak signal over the same time. In order to get an accurate result for the SNR it is generally required to measure over 25 -50 time samples of the spectrum. It is very important that your input to the spectrometer is constant during SNR measurements. Otherwise, you will be measuring other things like drift of you lamp power or time dependent signal levels from your sample. -

High Dynamic Range Ultrasound Imaging
The final publication is available at http://link.springer.com/article/10.1007/s11548-018-1729-3 Int J CARS manuscript No. (will be inserted by the editor) High Dynamic Range Ultrasound Imaging Alperen Degirmenci · Douglas P. Perrin · Robert D. Howe Received: 26 January 2018 Abstract Purpose High dynamic range (HDR) imaging is a popular computational photography technique that has found its way into every modern smartphone and camera. In HDR imaging, images acquired at different exposures are combined to increase the luminance range of the final image, thereby extending the limited dynamic range of the camera. Ultrasound imaging suffers from limited dynamic range as well; at higher power levels, the hyperechogenic tissue is overexposed, whereas at lower power levels, hypoechogenic tissue details are not visible. In this work, we apply HDR techniques to ultrasound imaging, where we combine ultrasound images acquired at different power levels to improve the level of detail visible in the final image. Methods Ultrasound images of ex vivo and in vivo tissue are acquired at different acoustic power levels and then combined to generate HDR ultrasound (HDR-US) images. The performance of five tone mapping operators is quantitatively evaluated using a similarity metric to determine the most suitable mapping for HDR-US imaging. Results The ex vivo and in vivo results demonstrated that HDR-US imaging enables visualizing both hyper- and hypoechogenic tissue at once in a single image. The Durand tone mapping operator preserved the most amount of detail across the dynamic range. Conclusions Our results strongly suggest that HDR-US imaging can improve the utility of ultrasound in image-based diagnosis and procedure guidance. -
Preview Only
AES-6id-2006 (r2011) AES information document for digital audio - Personal computer audio quality measurements Published by Audio Engineering Society, Inc. Copyright © 2006 by the Audio Engineering Society Preview only Abstract This document focuses on the measurement of audio quality specifications in a PC environment. Each specification listed has a definition and an example measurement technique. Also included is a detailed description of example test setups to measure each specification. An AES standard implies a consensus of those directly and materially affected by its scope and provisions and is intended as a guide to aid the manufacturer, the consumer, and the general public. An AES information document is a form of standard containing a summary of scientific and technical information; originated by a technically competent writing group; important to the preparation and justification of an AES standard or to the understanding and application of such information to a specific technical subject. An AES information document implies the same consensus as an AES standard. However, dissenting comments may be published with the document. The existence of an AES standard or AES information document does not in any respect preclude anyone, whether or not he or she has approved the document, from manufacturing, marketing, purchasing, or using products, processes, or procedures not conforming to the standard. Attention is drawn to the possibility that some of the elements of this AES standard or information document may be the subject of patent rights. AES shall not be held responsible for identifying any or all such patents. This document is subject to periodicwww.aes.org/standards review and users are cautioned to obtain the latest edition and printing.