Lecture Notes by Dr. Arne Hallam, Iowa State University, for an Introductory Course (Econ 500): Quantitative Methods in Economic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On Choquet Theorem for Random Upper Semicontinuous Functions
CORE Metadata, citation and similar papers at core.ac.uk Provided by Elsevier - Publisher Connector International Journal of Approximate Reasoning 46 (2007) 3–16 www.elsevier.com/locate/ijar On Choquet theorem for random upper semicontinuous functions Hung T. Nguyen a, Yangeng Wang b,1, Guo Wei c,* a Department of Mathematical Sciences, New Mexico State University, Las Cruces, NM 88003, USA b Department of Mathematics, Northwest University, Xian, Shaanxi 710069, PR China c Department of Mathematics and Computer Science, University of North Carolina at Pembroke, Pembroke, NC 28372, USA Received 16 May 2006; received in revised form 17 October 2006; accepted 1 December 2006 Available online 29 December 2006 Abstract Motivated by the problem of modeling of coarse data in statistics, we investigate in this paper topologies of the space of upper semicontinuous functions with values in the unit interval [0,1] to define rigorously the concept of random fuzzy closed sets. Unlike the case of the extended real line by Salinetti and Wets, we obtain a topological embedding of random fuzzy closed sets into the space of closed sets of a product space, from which Choquet theorem can be investigated rigorously. Pre- cise topological and metric considerations as well as results of probability measures and special prop- erties of capacity functionals for random u.s.c. functions are also given. Ó 2006 Elsevier Inc. All rights reserved. Keywords: Choquet theorem; Random sets; Upper semicontinuous functions 1. Introduction Random sets are mathematical models for coarse data in statistics (see e.g. [12]). A the- ory of random closed sets on Hausdorff, locally compact and second countable (i.e., a * Corresponding author. -

Math 327 Final Summary 20 February 2015 1. Manifold A
Math 327 Final Summary 20 February 2015 1. Manifold A subset M ⊂ Rn is Cr a manifold of dimension k if for any point p 2 M, there is an open set U ⊂ Rk and a Cr function φ : U ! Rn, such that (1) φ is injective and φ(U) ⊂ M is an open subset of M containing p; (2) φ−1 : φ(U) ! U is continuous; (3) D φ(x) has rank k for every x 2 U. Such a pair (U; φ) is called a chart of M. An atlas for M is a collection of charts f(Ui; φi)gi2I such that [ φi(Ui) = M i2I −1 (that is the images of φi cover M). (In some texts, like Spivak, the pair (φ(U); φ ) is called a chart or a coordinate system.) We shall mostly study C1 manifolds since they avoid any difficulty arising from the degree of differen- tiability. We shall also use the word smooth to mean C1. If we have an explicit atlas for a manifold then it becomes quite easy to deal with the manifold. Otherwise one can use the following theorem to find examples of manifolds. Theorem 1 (Regular value theorem). Let U ⊂ Rn be open and f : U ! Rk be a Cr function. Let a 2 Rk and −1 Ma = fx 2 U j f(x) = ag = f (a): The value a is called a regular value of f if f is a submersion on Ma; that is for any x 2 Ma, D f(x) has r rank k. -

A Level-Set Method for Convex Optimization with a 2 Feasible Solution Path
1 A LEVEL-SET METHOD FOR CONVEX OPTIMIZATION WITH A 2 FEASIBLE SOLUTION PATH 3 QIHANG LIN∗, SELVAPRABU NADARAJAHy , AND NEGAR SOHEILIz 4 Abstract. Large-scale constrained convex optimization problems arise in several application 5 domains. First-order methods are good candidates to tackle such problems due to their low iteration 6 complexity and memory requirement. The level-set framework extends the applicability of first-order 7 methods to tackle problems with complicated convex objectives and constraint sets. Current methods 8 based on this framework either rely on the solution of challenging subproblems or do not guarantee a 9 feasible solution, especially if the procedure is terminated before convergence. We develop a level-set 10 method that finds an -relative optimal and feasible solution to a constrained convex optimization 11 problem with a fairly general objective function and set of constraints, maintains a feasible solution 12 at each iteration, and only relies on calls to first-order oracles. We establish the iteration complexity 13 of our approach, also accounting for the smoothness and strong convexity of the objective function 14 and constraints when these properties hold. The dependence of our complexity on is similar to 15 the analogous dependence in the unconstrained setting, which is not known to be true for level-set 16 methods in the literature. Nevertheless, ensuring feasibility is not free. The iteration complexity of 17 our method depends on a condition number, while existing level-set methods that do not guarantee 18 feasibility can avoid such dependence. We numerically validate the usefulness of ensuring a feasible 19 solution path by comparing our approach with an existing level set method on a Neyman-Pearson classification problem.20 21 Key words. -

Full Text.Pdf
[version: January 7, 2014] Ann. Sc. Norm. Super. Pisa Cl. Sci. (5) vol. 12 (2013), no. 4, 863{902 DOI 10.2422/2036-2145.201107 006 Structure of level sets and Sard-type properties of Lipschitz maps Giovanni Alberti, Stefano Bianchini, Gianluca Crippa 2 d d−1 Abstract. We consider certain properties of maps of class C from R to R that are strictly related to Sard's theorem, and show that some of them can be extended to Lipschitz maps, while others still require some additional regularity. We also give examples showing that, in term of regularity, our results are optimal. Keywords: Lipschitz maps, level sets, critical set, Sard's theorem, weak Sard property, distri- butional divergence. MSC (2010): 26B35, 26B10, 26B05, 49Q15, 58C25. 1. Introduction In this paper we study three problems which are strictly interconnected and ultimately related to Sard's theorem: structure of the level sets of maps from d d−1 2 R to R , weak Sard property of functions from R to R, and locality of the divergence operator. Some of the questions we consider originated from a PDE problem studied in the companion paper [1]; they are however interesting in their own right, and this paper is in fact largely independent of [1]. d d−1 2 Structure of level sets. In case of maps f : R ! R of class C , Sard's theorem (see [17], [12, Chapter 3, Theorem 1.3])1 states that the set of critical values of f, namely the image according to f of the critical set S := x : rank(rf(x)) < d − 1 ; (1.1) has (Lebesgue) measure zero. -

ABOUT STATIONARITY and REGULARITY in VARIATIONAL ANALYSIS 1. Introduction the Paper Investigates Extremality, Stationarity and R
1 ABOUT STATIONARITY AND REGULARITY IN VARIATIONAL ANALYSIS 2 ALEXANDER Y. KRUGER To Boris Mordukhovich on his 60th birthday Abstract. Stationarity and regularity concepts for the three typical for variational analysis classes of objects { real-valued functions, collections of sets, and multifunctions { are investi- gated. An attempt is maid to present a classification scheme for such concepts and to show that properties introduced for objects from different classes can be treated in a similar way. Furthermore, in many cases the corresponding properties appear to be in a sense equivalent. The properties are defined in terms of certain constants which in the case of regularity proper- ties provide also some quantitative characterizations of these properties. The relations between different constants and properties are discussed. An important feature of the new variational techniques is that they can handle nonsmooth 3 functions, sets and multifunctions equally well Borwein and Zhu [8] 4 1. Introduction 5 The paper investigates extremality, stationarity and regularity properties of real-valued func- 6 tions, collections of sets, and multifunctions attempting at developing a unifying scheme for defining 7 and using such properties. 8 Under different names this type of properties have been explored for centuries. A classical 9 example of a stationarity condition is given by the Fermat theorem on local minima and max- 10 ima of differentiable functions. In a sense, any necessary optimality (extremality) conditions de- 11 fine/characterize certain stationarity (singularity/irregularity) properties. The separation theorem 12 also characterizes a kind of extremal (stationary) behavior of convex sets. 13 Surjectivity of a linear continuous mapping in the Banach open mapping theorem (and its 14 extension to nonlinear mappings known as Lyusternik-Graves theorem) is an example of a regularity 15 condition. -
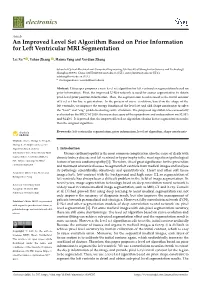
An Improved Level Set Algorithm Based on Prior Information for Left Ventricular MRI Segmentation
electronics Article An Improved Level Set Algorithm Based on Prior Information for Left Ventricular MRI Segmentation Lei Xu * , Yuhao Zhang , Haima Yang and Xuedian Zhang School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China; [email protected] (Y.Z.); [email protected] (H.Y.); [email protected] (X.Z.) * Correspondence: [email protected] Abstract: This paper proposes a new level set algorithm for left ventricular segmentation based on prior information. First, the improved U-Net network is used for coarse segmentation to obtain pixel-level prior position information. Then, the segmentation result is used as the initial contour of level set for fine segmentation. In the process of curve evolution, based on the shape of the left ventricle, we improve the energy function of the level set and add shape constraints to solve the “burr” and “sag” problems during curve evolution. The proposed algorithm was successfully evaluated on the MICCAI 2009: the mean dice score of the epicardium and endocardium are 92.95% and 94.43%. It is proved that the improved level set algorithm obtains better segmentation results than the original algorithm. Keywords: left ventricular segmentation; prior information; level set algorithm; shape constraints Citation: Xu, L.; Zhang, Y.; Yang, H.; Zhang, X. An Improved Level Set Algorithm Based on Prior 1. Introduction Information for Left Ventricular MRI Uremic cardiomyopathy is the most common complication also the cause of death with Segmentation. Electronics 2021, 10, chronic kidney disease and left ventricular hypertrophy is the most significant pathological 707. -
EE364 Review Session 2
EE364 Review EE364 Review Session 2 Convex sets and convex functions • Examples from chapter 3 • Installing and using CVX • 1 Operations that preserve convexity Convex sets Convex functions Intersection Nonnegative weighted sum Affine transformation Composition with an affine function Perspective transformation Perspective transformation Pointwise maximum and supremum Minimization Convex sets and convex functions are related via the epigraph. • Composition rules are extremely important. • EE364 Review Session 2 2 Simple composition rules Let h : R R and g : Rn R. Let f(x) = h(g(x)). Then: ! ! f is convex if h is convex and nondecreasing, and g is convex • f is convex if h is convex and nonincreasing, and g is concave • f is concave if h is concave and nondecreasing, and g is concave • f is concave if h is concave and nonincreasing, and g is convex • EE364 Review Session 2 3 Ex. 3.6 Functions and epigraphs. When is the epigraph of a function a halfspace? When is the epigraph of a function a convex cone? When is the epigraph of a function a polyhedron? Solution: If the function is affine, positively homogeneous (f(αx) = αf(x) for α 0), and piecewise-affine, respectively. ≥ Ex. 3.19 Nonnegative weighted sums and integrals. r 1. Show that f(x) = i=1 αix[i] is a convex function of x, where α1 α2 αPr 0, and x[i] denotes the ith largest component of ≥ ≥ · · · ≥ ≥ k n x. (You can use the fact that f(x) = i=1 x[i] is convex on R .) P 2. Let T (x; !) denote the trigonometric polynomial T (x; !) = x + x cos ! + x cos 2! + + x cos(n 1)!: 1 2 3 · · · n − EE364 Review Session 2 4 Show that the function 2π f(x) = log T (x; !) d! − Z0 is convex on x Rn T (x; !) > 0; 0 ! 2π . -

NP-Hardness of Deciding Convexity of Quartic Polynomials and Related Problems
NP-hardness of Deciding Convexity of Quartic Polynomials and Related Problems Amir Ali Ahmadi, Alex Olshevsky, Pablo A. Parrilo, and John N. Tsitsiklis ∗y Abstract We show that unless P=NP, there exists no polynomial time (or even pseudo-polynomial time) algorithm that can decide whether a multivariate polynomial of degree four (or higher even degree) is globally convex. This solves a problem that has been open since 1992 when N. Z. Shor asked for the complexity of deciding convexity for quartic polynomials. We also prove that deciding strict convexity, strong convexity, quasiconvexity, and pseudoconvexity of polynomials of even degree four or higher is strongly NP-hard. By contrast, we show that quasiconvexity and pseudoconvexity of odd degree polynomials can be decided in polynomial time. 1 Introduction The role of convexity in modern day mathematical programming has proven to be remarkably fundamental, to the point that tractability of an optimization problem is nowadays assessed, more often than not, by whether or not the problem benefits from some sort of underlying convexity. In the famous words of Rockafellar [39]: \In fact the great watershed in optimization isn't between linearity and nonlinearity, but convexity and nonconvexity." But how easy is it to distinguish between convexity and nonconvexity? Can we decide in an efficient manner if a given optimization problem is convex? A class of optimization problems that allow for a rigorous study of this question from a com- putational complexity viewpoint is the class of polynomial optimization problems. These are op- timization problems where the objective is given by a polynomial function and the feasible set is described by polynomial inequalities. -

Monotonic Transformations: Cardinal Versus Ordinal Utility
Natalia Lazzati Mathematics for Economics (Part I) Note 10: Quasiconcave and Pseudoconcave Functions Note 10 is based on Madden (1986, Ch. 13, 14) and Simon and Blume (1994, Ch. 21). Monotonic transformations: Cardinal Versus Ordinal Utility A utility function could be said to measure the level of satisfaction associated to each commodity bundle. Nowadays, no economist really believes that a real number can be assigned to each commodity bundle which expresses (in utils?) the consumer’slevel of satisfaction with this bundle. Economists believe that consumers have well-behaved preferences over bundles and that, given any two bundles, a consumer can indicate a preference of one over the other or the indi¤erence between the two. Although economists work with utility functions, they are concerned with the level sets of such functions, not with the number that the utility function assigns to any given level set. In consumer theory these level sets are called indi¤erence curves. A property of utility functions is called ordinal if it depends only on the shape and location of a consumer’sindi¤erence curves. It is alternatively called cardinal if it also depends on the actual amount of utility the utility function assigns to each indi¤erence set. In the modern approach, we say that two utility functions are equivalent if they have the same indi¤erence sets, although they may assign di¤erent numbers to each level set. For instance, let 2 2 u : R+ R where u (x) = x1x2 be a utility function, and let v : R+ R be the utility function ! ! v (x) = u (x) + 1: These two utility functions represent the same preferences and are therefore equivalent. -

The Ekeland Variational Principle, the Bishop-Phelps Theorem, and The
The Ekeland Variational Principle, the Bishop-Phelps Theorem, and the Brøndsted-Rockafellar Theorem Our aim is to prove the Ekeland Variational Principle which is an abstract result that found numerous applications in various fields of Mathematics. As its application to Convex Analysis, we provide a proof of the famous Bishop- Phelps Theorem and some related results. Let us recall that the epigraph and the hypograph of a function f : X ! [−∞; +1] (where X is a set) are the following subsets of X × R: epi f = f(x; t) 2 X × R : t ≥ f(x)g ; hyp f = f(x; t) 2 X × R : t ≤ f(x)g : Notice that, if f > −∞ on X then epi f 6= ; if and only if f is proper, that is, f is finite at at least one point. 0.1. The Ekeland Variational Principle. In what follows, (X; d) is a metric space. Given λ > 0 and (x; t) 2 X × R, we define the set Kλ(x; t) = f(y; s): s ≤ t − λd(x; y)g = f(y; s): λd(x; y) ≤ t − sg ⊂ X × R: Notice that Kλ(x; t) = hyp[t − λ(x; ·)]. Let us state some useful properties of these sets. Lemma 0.1. (a) Kλ(x; t) is closed and contains (x; t). (b) If (¯x; t¯) 2 Kλ(x; t) then Kλ(¯x; t¯) ⊂ Kλ(x; t). (c) If (xn; tn) ! (x; t) and (xn+1; tn+1) 2 Kλ(xn; tn) (n 2 N), then \ Kλ(x; t) = Kλ(xn; tn) : n2N Proof. (a) is quite easy. -

5.7 Level Sets and the Fast Marching Method
�c 2006 Gilbert Strang 5.7 Level Sets and the Fast Marching Method The level sets of f(x; y) are the sets on which the function is constant. For example f(x; y) = x2 + y2 is constant on circles around the origin. Geometrically, a level plane z = constant will cut through the surface z = f(x; y) on a level set. One attractive feature of working with level sets is that their topology can change (pieces of the level set can separate or come together) just by changing the constant. Starting from one level set, the signed distance function d(x; y) is especially important. It gives the distance to the level set, and also the sign: typically d > 0 outside and d < 0 inside. For the unit circle, d = r − 1 = px2 + y2 − 1 will be the signed distance function. In the mesh generation algorithm of Section 2. , it was convenient to describe the region by its distance function d(x; y). A fundamental fact of calculus: The gradient of f(x; y) is perpendicular to its level sets. Reason: In the tangent direction t to the level set, f(x; y) is not changing and (grad f) · t is zero. So grad f is in the normal direction. For the function x2 + y2, the gradient (2x; 2y) points outward from the circular level sets. The gradient of d(x; y) = px2 + y2 − 1 points the same way, and it has a special property: The gradient of a distance function is a unit vector. It is the unit normal n(x; y) to the level sets. -

Level Set Methods for Finding Critical Points of Mountain Pass Type
Nonlinear Analysis 74 (2011) 4058–4082 Contents lists available at ScienceDirect Nonlinear Analysis journal homepage: www.elsevier.com/locate/na Level set methods for finding critical points of mountain pass type Adrian S. Lewis a, C.H. Jeffrey Pang b,∗ a School of Operations Research and Information Engineering, Cornell University, Ithaca, NY 14853, United States b Massachusetts Institute of Technology, Department of Mathematics, 2-334, 77 Massachusetts Avenue, Cambridge MA 02139-4307, United States article info a b s t r a c t Article history: Computing mountain passes is a standard way of finding critical points. We describe a Received 24 June 2009 numerical method for finding critical points that is convergent in the nonsmooth case and Accepted 23 March 2011 locally superlinearly convergent in the smooth finite dimensional case. We apply these Communicated by Ravi Agarwal techniques to describe a strategy for addressing the Wilkinson problem of calculating the distance from a matrix to a closest matrix with repeated eigenvalues. Finally, we relate Keywords: critical points of mountain pass type to nonsmooth and metric critical point theory. Mountain pass ' 2011 Elsevier Ltd. All rights reserved. Nonsmooth critical points Superlinear convergence Metric critical point theory Wilkinson distance 1. Introduction Computing mountain passes is an important problem in computational chemistry and in the study of nonlinear partial differential equations. We begin with the following definition. Definition 1.1. Let X be a topological space, and consider a; b 2 X. For a function f V X ! R, define a mountain pass p∗ 2 Γ .a; b/ to be a minimizer of the problem inf sup f ◦ p.t/: p2Γ .a;b/ 0≤t≤1 Here, Γ .a; b/ is the set of continuous paths p VT0; 1U! X such that p.0/ D a and p.1/ D b.