Plotting the Spirograph Equations with Gnuplot
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -

Unity Via Diversity 81
Unity via diversity 81 Unity via diversity Unity via diversity is a concept whose main idea is that every entity could be examined by different point of views. Many sources name this conception as interdisciplinarity . The mystery of interdisciplinarity is revealed when people realize that there is only one discipline! The division into multiple disciplines (or subjects) is just the human way to divide-and-understand Nature. Demonstrations of how informatics links real life and mathematics can be found everywhere. Let’s start with the bicycle – a well-know object liked by most students. Bicycles have light reflectors for safety reasons. Some of the reflectors are attached sideway on the wheels. Wheel reflector Reflectors notify approaching vehicles that there is a bicycle moving along or across the road. Even if the conditions prevent the driver from seeing the bicycle, the reflector is a sufficient indicator if the bicycle is moving or not, is close or far, is along the way or across it. Curve of the reflector of a rolling wheel When lit during the night, the wheel’s side reflectors create a beautiful luminous curve – a trochoid . 82 Appendix to Chapter 5 A trochoid curve is the locus of a fixed point as a circle rolls without slipping along a straight line. Depending on the position of the point a trochoid could be further classified as curtate cycloid (the point is internal to the circle), cycloid (the point is on the circle), and prolate cycloid (the point is outside the circle). Cycloid, curtate cycloid and prolate cycloid An interesting activity during the study of trochoids is to draw them using software tools. -

Hypocycloid Motion in the Melvin Magnetic Universe
Hypocycloid motion in the Melvin magnetic universe Yen-Kheng Lim∗ Department of Mathematics, Xiamen University Malaysia, 43900 Sepang, Malaysia May 19, 2020 Abstract The trajectory of a charged test particle in the Melvin magnetic universe is shown to take the form of hypocycloids in two different regimes, the first of which is the class of perturbed circular orbits, and the second of which is in the weak-field approximation. In the latter case we find a simple relation between the charge of the particle and the number of cusps. These two regimes are within a continuously connected family of deformed hypocycloid-like orbits parametrised by the magnetic flux strength of the Melvin spacetime. 1 Introduction The Melvin universe describes a bundle of parallel magnetic field lines held together under its own gravity in equilibrium [1, 2]. The possibility of such a configuration was initially considered by Wheeler [3], and a related solution was obtained by Bonnor [4], though in today’s parlance it is typically referred to as the Melvin spacetime [5]. By the duality of electromagnetic fields, a similar solution consisting of parallel electric fields can be arXiv:2004.08027v2 [gr-qc] 18 May 2020 obtained. In this paper, we shall mainly be interested in the magnetic version of this solution. The Melvin spacetime has been a solution of interest in various contexts of theoretical high-energy physics. For instance, the Melvin spacetime provides a background of a strong magnetic field to induce the quantum pair creation of black holes [6, 7]. Havrdov´aand Krtouˇsshowed that the Melvin universe can be constructed by taking the two charged, accelerating black holes and pushing them infinitely far apart [8]. -

The Math in “Laser Light Math”
The Math in “Laser Light Math” When graphed, many mathematical curves are beautiful to view. These curves are usually brought into graphic form by incorporating such devices as a plotter, printer, video screen, or mechanical spirograph tool. While these techniques work, and can produce interesting images, the images are normally small and not animated. To create large-scale animated images, such as those encountered in the entertainment industry, light shows, or art installations, one must call upon some unusual graphing strategies. It was this desire to create large and animated images of certain mathematical curves that led to our design and implementation of the Laser Light Math projection system. In our interdisciplinary efforts to create a new way to graph certain mathematical curves with laser light, Professor Lessley designed the hardware and software and Professor Beale constructed a simplified set of harmonic equations. Of special interest was the issue of graphing a family of mathematical curves in the roulette or spirograph domain with laser light. Consistent with the techniques of making roulette patterns, images created by the Laser Light Math system are constructed by mixing sine and cosine functions together at various frequencies, shapes, and amplitudes. Images created in this fashion find birth in the mathematical process of making “roulette” or “spirograph” curves. From your childhood, you might recall working with a spirograph toy to which you placed one geared wheel within the circumference of another larger geared wheel. After inserting your pen, then rotating the smaller gear around or within the circumference of the larger gear, a graphed representation emerged of a certain mathematical curve in the roulette family (such as the epitrochoid, hypotrochoid, epicycloid, hypocycloid, or perhaps the beautiful rose family). -
Engineering Curves and Theory of Projections
ME 111: Engineering Drawing Lecture 4 08-08-2011 Engineering Curves and Theory of Projection Indian Institute of Technology Guwahati Guwahati – 781039 Distance of the point from the focus Eccentrici ty = Distance of the point from the directric When eccentricity < 1 Ellipse =1 Parabola > 1 Hyperbola eg. when e=1/2, the curve is an Ellipse, when e=1, it is a parabola and when e=2, it is a hyperbola. 2 Focus-Directrix or Eccentricity Method Given : the distance of focus from the directrix and eccentricity Example : Draw an ellipse if the distance of focus from the directrix is 70 mm and the eccentricity is 3/4. 1. Draw the directrix AB and axis CC’ 2. Mark F on CC’ such that CF = 70 mm. 3. Divide CF into 7 equal parts and mark V at the fourth division from C. Now, e = FV/ CV = 3/4. 4. At V, erect a perpendicular VB = VF. Join CB. Through F, draw a line at 45° to meet CB produced at D. Through D, drop a perpendicular DV’ on CC’. Mark O at the midpoint of V– V’. 3 Focus-Directrix or Eccentricity Method ( Continued) 5. With F as a centre and radius = 1–1’, cut two arcs on the perpendicular through 1 to locate P1 and P1’. Similarly, with F as centre and radii = 2– 2’, 3–3’, etc., cut arcs on the corresponding perpendiculars to locate P2 and P2’, P3 and P3’, etc. Also, cut similar arcs on the perpendicular through O to locate V1 and V1’. 6. Draw a smooth closed curve passing through V, P1, P/2, P/3, …, V1, …, V’, …, V1’, … P/3’, P/2’, P1’. -

Representations of Epitrochoids and Hypotrochoids
REPRESENTATIONS OF EPITROCHOIDS AND HYPOTROCHOIDS by Michelle Natalie Rene Marie Bouthillier Submitted in partial fulfillment of the requirements for the degree of Master of Science at Dalhousie University Halifax, Nova Scotia March 2018 © Copyright by Michelle Natalie Rene Marie Bouthillier, 2018 Table of Contents List of Figures ..................................... iii Abstract ......................................... iv Acknowledgements .................................. v Chapter 1 Introduction ............................. 1 Chapter 2 The Implicitization Problem .................. 5 2.1 Introduction . 5 2.2 Resultants . 9 2.3 Gr¨obnerBases . 18 2.4 Resultants versus Gr¨obnerBasis . 47 Chapter 3 Implicitization of Hypotrochoids and Epitrochoids ... 51 3.1 Implicitization Method . 51 3.2 Results for Small Values of m and n . 56 3.3 Examples . 64 Chapter 4 Envelopes ............................... 79 4.1 Introduction . 79 4.2 Epicycloids . 80 4.3 Hypocycloids . 87 Chapter 5 Conclusion .............................. 94 Bibliography ....................................... 95 Appendix ......................................... 97 ii List of Figures 1.1 Epitrochoid with R = 1, r = 3, d = 4. 1 1.2 Hypotrochoid with R = 4, r = 1, d = 3~2. 2 1.3 A trochoid with a = 2r ........................ 3 2.1 Example of a curve that we may wish to implicitize . 8 3.1 Epicycloids with implicit forms described by Conjecture 2 . 66 3.2 Epicycloids with implicit forms described by Conjecture 3 . 67 3.3 Hypocycloids with implicit forms described by Conjecture 4 . 69 3.4 Hypocycloids with implicit forms described by Conjecture 5 . 71 3.5 Hypocycloids with implicit forms described by Conjecture 6 . 73 3.6 Hypocycloids with implicit forms described by Conjecture 7 . 74 3.7 Hypocycloids with implicit forms described by Conjecture 8 . 76 3.8 Hypocycloids with implicit forms described by Conjecture 9 . -

Encyclopaedia Britannica, 11Th Edition, by Various 1
Encyclopaedia Britannica, 11th Edition, by Various 1 Encyclopaedia Britannica, 11th Edition, by Various The Project Gutenberg EBook of Encyclopaedia Britannica, 11th Edition, Volume 9, Slice 6, by Various This eBook is for the use of anyone anywhere at no cost and with almost no restrictions whatsoever. You may copy it, give it away or re-use it under the terms of the Project Gutenberg License included with this eBook or online at www.gutenberg.org Title: Encyclopaedia Britannica, 11th Edition, Volume 9, Slice 6 "English Language" to "Epsom Salts" Author: Various Release Date: February 17, 2011 [EBook #35306] Language: English Character set encoding: ASCII *** START OF THIS PROJECT GUTENBERG EBOOK ENCYCLOPAEDIA BRITANNICA *** Produced by Marius Masi, Don Kretz and the Online Distributed Proofreading Team at http://www.pgdp.net Transcriber's notes: (1) Numbers following letters (without space) like C2 were originally printed in subscript. Letter subscripts are preceded by an underscore, like Cn. Encyclopaedia Britannica, 11th Edition, by Various 2 (2) Characters following a carat (^) were printed in superscript. (3) Side-notes were relocated to function as titles of their respective paragraphs. (4) Macrons and breves above letters and dots below letters were not inserted. (5) Small and capital EZH letters are subtituted with [gh] and [Gh] respectively. Thorn is subtituted with th or Th, and eth is subtituted with dh. (6) [root] stands for the root symbol; [alpha], [beta], etc. for greek letters. (7) The following typographical errors have been corrected: ARTICLE ENGLISH LANGUAGE: "The writers of each district wrote in the dialect familiar to them; and between extreme forms the difference was so great as to amount to unintelligibility ..." 'familiar' amended from 'familar'. -
The Geometry of Map Equations for Trochoids
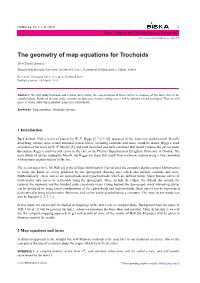
NTMSCI 6, No. 2, 6-18 (2018) 6 New Trends in Mathematical Sciences http://dx.doi.org/10.20852/ntmsci.2018.265 The geometry of map equations for Trochoids Sibel Pasali Atmaca Muugla Sitki Kocman University, Faculty of Science, Department of Mathematics, Mugla, Turkey Received: 3 February 2018, Accepted: 14 March 2018 Published online: 20 March 2018. Abstract: We will study trochoids and related curves using the representation of these curves as mapping of the unit circle in the complex plane. Points on the unit circle, or turns, an their uses in representing curves will be introduced and developed. Then we will prove several results which illustrate properties of trochoids. Keywords: Map equations, Trochoids, rosettes. 1 Introduction Back around 1920 a series of papers by W. F. Rigge [6,7,8,9,10] appeared in the American mathematical Monthly describing various ways certain bounded closed curves, including cardioids and roses, could be drawn. Rigge’s work extended earlier work by R. E. Moritz [5], and both described and built machines that would produce the curves under discussion. Rigge’s machine still exists in the care of the Physics Department at Creighton University in Omaha. The basic kinds of curves studied by Moritz and Rigge are those that result from harmonic motion along a line combined with uniform angular motion of the line. The recent paper by L. M. Hall [4] in the College Mathematics Journal used the computer algebra system Mathematica to study the kinds of curves produced by the Spirograph drawing sets, which also include cardoids and roses. Mathematically , these curves are epitrochoids and hypoctrochoids, which are defined below. -
NEW HORIZONS in GEOMETRY 2010 Mathematics Subject Classification
DOLCIANI MATHEMATICAL EXPOSITIONS 47 10.1090/dol/047 NEW HORIZONS IN GEOMETRY 2010 Mathematics Subject Classification. Primary 51-01. Originally published by The Mathematical Association of America, 2012. ISBN: 978-1-4704-4335-1 LCCN: 2012949754 Copyright c 2012, held by the Amercan Mathematical Society Printed in the United States of America. Reprinted by the American Mathematical Society, 2018 The American Mathematical Society retains all rights except those granted to the United States Government. ∞ The paper used in this book is acid-free and falls within the guidelines established to ensure permanence and durability. Visit the AMS home page at http://www.ams.org/ 10 9 8 7 6 5 4 3 2 23 22 21 20 19 18 The Dolciani Mathematical Expositions NUMBER FORTY-SEVEN NEW HORIZONS IN GEOMETRY Tom M. Ap ostol California Institute of Technology and Mamikon A. Mnatsakanian California Institute of Technology Providence, Rhode Island The DOLCIANI MATHEMATICAL EXPOSITIONS series of the Mathematical Association of America was established through a generous gift to the Association from Mary P. Dolciani, Professor of Mathematics at Hunter College of the City Uni- versity of New York. In making the gift, Professor Dolciani, herself an exceptionally talented and successful expositor of mathematics, had the purpose of furthering the ideal of excellence in mathematical exposition. The Association, for its part, was delighted to accept the gracious gesture initi- ating the revolving fund for this series from one who has served the Association with distinction, both as a member of the Committee on Publications and as a member of the Board of Governors. -

Projecting Mathematical Curves with Laser Light
Bridges 2011: Mathematics, Music, Art, Architecture, Culture Projecting Mathematical Curves with Laser Light Merrill Lessley* Department of Theatre and Dance • University of Colorado Boulder [email protected] Paul Beale Department of Physics • University of Colorado Boulder Abstract This paper describes the math and technology required to project a variety of mathematical curves with an innovative laser light control system. The focus is upon creating large-scale animated laser projections of spirograph shapes, such as those found among the epitrochoid, hypotrochoid, epicycloid, and hypocycloid curves. The process described utilizes an unusual math approach that was first presented by the Greek or Egyptian mathematician/astronomer Ptolemy. Instead of using the traditional spirograph techniques of rotating one wheel outside or inside of another wheel, the Laser Light Math system is structured around Ptolemy’s idea of epicycles where one circle's center moves on the circumference of another circle. Traditional equations are modified to consider fully the elements of frequency, rotational direction, diameter, and offset. Introduction When graphed, many mathematical curves are beautiful to view. These curves are often brought into graphic form by incorporating such devices as a plotter, printer, video screen, or mechanical spirograph tool. While these techniques work, and can produce interesting results, the images are normally small and not animated. To create large-scale animated images, such as those encountered in the entertainment industry, light shows, or art installations, one must use some unusual graphing strategies. This desire to create large and animated images of certain mathematical curves led to our design and implementation of the Laser Light Math projection system. -

Developing a Flexible and Expressive Realtime Polyphonic Wave Terrain Synthesis Instrument Based on a Visual and Multidimensional Methodology
Edith Cowan University Research Online Theses: Doctorates and Masters Theses 2005 Developing a flexible and expressive realtime polyphonic wave terrain synthesis instrument based on a visual and multidimensional methodology Stuart G. James Edith Cowan University Follow this and additional works at: https://ro.ecu.edu.au/theses Part of the Music Commons Recommended Citation James, S. G. (2005). Developing a flexible and expressive realtime polyphonic wave terrain synthesis instrument based on a visual and multidimensional methodology. https://ro.ecu.edu.au/theses/107 This Thesis is posted at Research Online. https://ro.ecu.edu.au/theses/107 Edith Cowan University Copyright Warning You may print or download ONE copy of this document for the purpose of your own research or study. The University does not authorize you to copy, communicate or otherwise make available electronically to any other person any copyright material contained on this site. You are reminded of the following: Copyright owners are entitled to take legal action against persons who infringe their copyright. A reproduction of material that is protected by copyright may be a copyright infringement. Where the reproduction of such material is done without attribution of authorship, with false attribution of authorship or the authorship is treated in a derogatory manner, this may be a breach of the author’s moral rights contained in Part IX of the Copyright Act 1968 (Cth). Courts have the power to impose a wide range of civil and criminal sanctions for infringement of copyright, infringement of moral rights and other offences under the Copyright Act 1968 (Cth). Higher penalties may apply, and higher damages may be awarded, for offences and infringements involving the conversion of material into digital or electronic form. -

The Schilling Kinematic Models at the Smithsonian
Journal of Humanistic Mathematics Volume 5 | Issue 1 January 2015 The Schilling Kinematic Models at the Smithsonian Amy Shell-Gellasch Dr Montgomery College Follow this and additional works at: https://scholarship.claremont.edu/jhm Recommended Citation Shell-Gellasch, A. "The Schilling Kinematic Models at the Smithsonian," Journal of Humanistic Mathematics, Volume 5 Issue 1 (January 2015), pages 167-179. DOI: 10.5642/jhummath.201501.09 . Available at: https://scholarship.claremont.edu/jhm/vol5/iss1/9 ©2015 by the authors. This work is licensed under a Creative Commons License. JHM is an open access bi-annual journal sponsored by the Claremont Center for the Mathematical Sciences and published by the Claremont Colleges Library | ISSN 2159-8118 | http://scholarship.claremont.edu/jhm/ The editorial staff of JHM works hard to make sure the scholarship disseminated in JHM is accurate and upholds professional ethical guidelines. However the views and opinions expressed in each published manuscript belong exclusively to the individual contributor(s). The publisher and the editors do not endorse or accept responsibility for them. See https://scholarship.claremont.edu/jhm/policies.html for more information. The Schilling Kinematic Models at the Smithsonian Amy Shell-Gellasch Montgomery College, Rockville, MD 20850, USA Smithsonian National Museum of American History, Washington, DC 20001, USA [email protected] Synopsis The kinematic models manufactured by the German firm of Martin Schilling were used in the late 19th and early 20th centuries to depict mathematical curves. The Smithsonian Institution owns twelve Schilling models. As a volunteer researcher in mathematics at the Smithsonian National Museum of American History, the author has chosen a few of her favorite models as an introduction to this inter- esting set of kinematic models.