Higher-Degree Polynomial Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Symmetry and the Cubic Formula
SYMMETRY AND THE CUBIC FORMULA DAVID CORWIN The purpose of this talk is to derive the cubic formula. But rather than finding the exact formula, I'm going to prove that there is a cubic formula. The way I'm going to do this uses symmetry in a very elegant way, and it foreshadows Galois theory. Note that this material comes almost entirely from the first chapter of http://homepages.warwick.ac.uk/~masda/MA3D5/Galois.pdf. 1. Deriving the Quadratic Formula Before discussing the cubic formula, I would like to consider the quadratic formula. While I'm expecting you know the quadratic formula already, I'd like to treat this case first in order to motivate what we will do with the cubic formula. Suppose we're solving f(x) = x2 + bx + c = 0: We know this factors as f(x) = (x − α)(x − β) where α; β are some complex numbers, and the problem is to find α; β in terms of b; c. To go the other way around, we can multiply out the expression above to get (x − α)(x − β) = x2 − (α + β)x + αβ; which means that b = −(α + β) and c = αβ. Notice that each of these expressions doesn't change when we interchange α and β. This should be the case, since after all, we labeled the two roots α and β arbitrarily. This means that any expression we get for α should equally be an expression for β. That is, one formula should produce two values. We say there is an ambiguity here; it's ambiguous whether the formula gives us α or β. -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Algorithmic Factorization of Polynomials Over Number Fields
Rose-Hulman Institute of Technology Rose-Hulman Scholar Mathematical Sciences Technical Reports (MSTR) Mathematics 5-18-2017 Algorithmic Factorization of Polynomials over Number Fields Christian Schulz Rose-Hulman Institute of Technology Follow this and additional works at: https://scholar.rose-hulman.edu/math_mstr Part of the Number Theory Commons, and the Theory and Algorithms Commons Recommended Citation Schulz, Christian, "Algorithmic Factorization of Polynomials over Number Fields" (2017). Mathematical Sciences Technical Reports (MSTR). 163. https://scholar.rose-hulman.edu/math_mstr/163 This Dissertation is brought to you for free and open access by the Mathematics at Rose-Hulman Scholar. It has been accepted for inclusion in Mathematical Sciences Technical Reports (MSTR) by an authorized administrator of Rose-Hulman Scholar. For more information, please contact [email protected]. Algorithmic Factorization of Polynomials over Number Fields Christian Schulz May 18, 2017 Abstract The problem of exact polynomial factorization, in other words expressing a poly- nomial as a product of irreducible polynomials over some field, has applications in algebraic number theory. Although some algorithms for factorization over algebraic number fields are known, few are taught such general algorithms, as their use is mainly as part of the code of various computer algebra systems. This thesis provides a summary of one such algorithm, which the author has also fully implemented at https://github.com/Whirligig231/number-field-factorization, along with an analysis of the runtime of this algorithm. Let k be the product of the degrees of the adjoined elements used to form the algebraic number field in question, let s be the sum of the squares of these degrees, and let d be the degree of the polynomial to be factored; then the runtime of this algorithm is found to be O(d4sk2 + 2dd3). -

January 10, 2010 CHAPTER SIX IRREDUCIBILITY and FACTORIZATION §1. BASIC DIVISIBILITY THEORY the Set of Polynomials Over a Field
January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION §1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics. A polynomials is irreducible iff it cannot be factored as a product of polynomials of strictly lower degree. Otherwise, the polynomial is reducible. Every linear polynomial is irreducible, and, when F = C, these are the only ones. When F = R, then the only other irreducibles are quadratics with negative discriminants. However, when F = Q, there are irreducible polynomials of arbitrary degree. As for the integers, we have a division algorithm, which in this case takes the form that, if f(x) and g(x) are two polynomials, then there is a quotient q(x) and a remainder r(x) whose degree is less than that of g(x) for which f(x) = q(x)g(x) + r(x) . The greatest common divisor of two polynomials f(x) and g(x) is a polynomial of maximum degree that divides both f(x) and g(x). It is determined up to multiplication by a constant, and every common divisor divides the greatest common divisor. These correspond to similar results for the integers and can be established in the same way. One can determine a greatest common divisor by the Euclidean algorithm, and by going through the equations in the algorithm backward arrive at the result that there are polynomials u(x) and v(x) for which gcd (f(x), g(x)) = u(x)f(x) + v(x)g(x) . -
![2.4 Algebra of Polynomials ([1], P.136-142) in This Section We Will Give a Brief Introduction to the Algebraic Properties of the Polynomial Algebra C[T]](https://docslib.b-cdn.net/cover/8740/2-4-algebra-of-polynomials-1-p-136-142-in-this-section-we-will-give-a-brief-introduction-to-the-algebraic-properties-of-the-polynomial-algebra-c-t-408740.webp)
2.4 Algebra of Polynomials ([1], P.136-142) in This Section We Will Give a Brief Introduction to the Algebraic Properties of the Polynomial Algebra C[T]
2.4 Algebra of polynomials ([1], p.136-142) In this section we will give a brief introduction to the algebraic properties of the polynomial algebra C[t]. In particular, we will see that C[t] admits many similarities to the algebraic properties of the set of integers Z. Remark 2.4.1. Let us first recall some of the algebraic properties of the set of integers Z. - division algorithm: given two integers w, z 2 Z, with jwj ≤ jzj, there exist a, r 2 Z, with 0 ≤ r < jwj such that z = aw + r. Moreover, the `long division' process allows us to determine a, r. Here r is the `remainder'. - prime factorisation: for any z 2 Z we can write a1 a2 as z = ±p1 p2 ··· ps , where pi are prime numbers. Moreover, this expression is essentially unique - it is unique up to ordering of the primes appearing. - Euclidean algorithm: given integers w, z 2 Z there exists a, b 2 Z such that aw + bz = gcd(w, z), where gcd(w, z) is the `greatest common divisor' of w and z. In particular, if w, z share no common prime factors then we can write aw + bz = 1. The Euclidean algorithm is a process by which we can determine a, b. We will now introduce the polynomial algebra in one variable. This is simply the set of all polynomials with complex coefficients and where we make explicit the C-vector space structure and the multiplicative structure that this set naturally exhibits. Definition 2.4.2. - The C-algebra of polynomials in one variable, is the quadruple (C[t], α, σ, µ)43 where (C[t], α, σ) is the C-vector space of polynomials in t with C-coefficients defined in Example 1.2.6, and µ : C[t] × C[t] ! C[t];(f , g) 7! µ(f , g), is the `multiplication' function. -

Factoring Polynomials
EAP/GWL Rev. 1/2011 Page 1 of 5 Factoring a polynomial is the process of writing it as the product of two or more polynomial factors. Example: — Set the factors of a polynomial equation (as opposed to an expression) equal to zero in order to solve for a variable: Example: To solve ,; , The flowchart below illustrates a sequence of steps for factoring polynomials. First, always factor out the Greatest Common Factor (GCF), if one exists. Is the equation a Binomial or a Trinomial? 1 Prime polynomials cannot be factored Yes No using integers alone. The Sum of Squares and the Four or more quadratic factors Special Cases? terms of the Sum and Difference of Binomial Trinomial Squares are (two terms) (three terms) Factor by Grouping: always Prime. 1. Group the terms with common factors and factor 1. Difference of Squares: out the GCF from each Perfe ct Square grouping. 1 , 3 Trinomial: 2. Sum of Squares: 1. 2. Continue factoring—by looking for Special Cases, 1 , 2 2. 3. Difference of Cubes: Grouping, etc.—until the 3 equation is in simplest form FYI: A Sum of Squares can 1 , 2 (or all factors are Prime). 4. Sum of Cubes: be factored using imaginary numbers if you rewrite it as a Difference of Squares: — 2 Use S.O.A.P to No Special √1 √1 Cases remember the signs for the factors of the 4 Completing the Square and the Quadratic Formula Sum and Difference Choose: of Cubes: are primarily methods for solving equations rather 1. Factor by Grouping than simply factoring expressions. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Algebra II Level 1
Algebra II 5 credits – Level I Grades: 10-11, Level: I Prerequisite: Minimum grade of 70 in Geometry Level I (or a minimum grade of 90 in Geometry Topics) Units of study include: equations and inequalities, linear equations and functions, systems of linear equations and inequalities, matrices and determinants, quadratic functions, polynomials and polynomial functions, powers, roots, and radicals, rational equations and functions, sequence and series, and probability and statistics. PROFICIENCIES INEQUALITIES -Solve inequalities -Solve combined inequalities -Use inequality models to solve problems -Solve absolute values in open sentences -Solve absolute value sentences graphically LINEAR EQUATION FUNCTIONS -Solve open sentences in two variables -Graph linear equations in two variables -Find the slope of the line -Write the equation of a line -Solve systems of linear equations in two variables -Apply systems of equations to solve real word problems -Solve linear inequalities in two variables -Find values of functions and graphs -Find equations of linear functions and apply properties of linear functions -Graph relations and determine when relations are functions PRODUCTS AND FACTORS OF POLYNOMIALS -Simplify, add and subtract polynomials -Use laws of exponents to multiply a polynomial by a monomial -Calculate the product of two or more polynomials -Demonstrate factoring -Solve polynomial equations and inequalities -Apply polynomial equations to solve real world problems RATIONAL EQUATIONS -Simplify quotients using laws of exponents -Simplify -

Finding Equations of Polynomial Functions with Given Zeros
Finding Equations of Polynomial Functions with Given Zeros 푛 푛−1 2 Polynomials are functions of general form 푃(푥) = 푎푛푥 + 푎푛−1 푥 + ⋯ + 푎2푥 + 푎1푥 + 푎0 ′ (푛 ∈ 푤ℎ표푙푒 # 푠) Polynomials can also be written in factored form 푃(푥) = 푎(푥 − 푧1)(푥 − 푧2) … (푥 − 푧푖) (푎 ∈ ℝ) Given a list of “zeros”, it is possible to find a polynomial function that has these specific zeros. In fact, there are multiple polynomials that will work. In order to determine an exact polynomial, the “zeros” and a point on the polynomial must be provided. Examples: Practice finding polynomial equations in general form with the given zeros. Find an* equation of a polynomial with the Find the equation of a polynomial with the following two zeros: 푥 = −2, 푥 = 4 following zeroes: 푥 = 0, −√2, √2 that goes through the point (−2, 1). Denote the given zeros as 푧1 푎푛푑 푧2 Denote the given zeros as 푧1, 푧2푎푛푑 푧3 Step 1: Start with the factored form of a polynomial. Step 1: Start with the factored form of a polynomial. 푃(푥) = 푎(푥 − 푧1)(푥 − 푧2) 푃(푥) = 푎(푥 − 푧1)(푥 − 푧2)(푥 − 푧3) Step 2: Insert the given zeros and simplify. Step 2: Insert the given zeros and simplify. 푃(푥) = 푎(푥 − (−2))(푥 − 4) 푃(푥) = 푎(푥 − 0)(푥 − (−√2))(푥 − √2) 푃(푥) = 푎(푥 + 2)(푥 − 4) 푃(푥) = 푎푥(푥 + √2)(푥 − √2) Step 3: Multiply the factored terms together. Step 3: Multiply the factored terms together 푃(푥) = 푎(푥2 − 2푥 − 8) 푃(푥) = 푎(푥3 − 2푥) Step 4: The answer can be left with the generic “푎”, or a value for “푎”can be chosen, Step 4: Insert the given point (−2, 1) to inserted, and distributed. -

The Computational Complexity of Polynomial Factorization
Open Questions From AIM Workshop: The Computational Complexity of Polynomial Factorization 1 Dense Polynomials in Fq[x] 1.1 Open Questions 1. Is there a deterministic algorithm that is polynomial time in n and log(q)? State of the art algorithm should be seen on May 16th as a talk. 2. How quickly can we factor x2−a without hypotheses (Qi Cheng's question) 1 State of the art algorithm Burgess O(p 2e ) 1.2 Open Question What is the exponent of the probabilistic complexity (for q = 2)? 1.3 Open Question Given a set of polynomials with very low degree (2 or 3), decide if all of them factor into linear factors. Is it faster to do this by factoring their product or each one individually? (Tanja Lange's question) 2 Sparse Polynomials in Fq[x] 2.1 Open Question α β Decide whether a trinomial x + ax + b with 0 < β < α ≤ q − 1, a; b 2 Fq has a root in Fq, in polynomial time (in log(q)). (Erich Kaltofen's Question) 2.2 Open Questions 1. Finding better certificates for irreducibility (a) Are there certificates for irreducibility that one can verify faster than the existing irreducibility tests? (Victor Miller's Question) (b) Can you exhibit families of sparse polynomials for which you can find shorter certificates? 2. Find a polynomial-time algorithm in log(q) , where q = pn, that solves n−1 pi+pj n−1 pi Pi;j=0 ai;j x +Pi=0 bix +c in Fq (or shows no solutions) and works 1 for poly of the inputs, and never lies. -

Section P.2 Solving Equations Important Vocabulary
Section P.2 Solving Equations 5 Course Number Section P.2 Solving Equations Instructor Objective: In this lesson you learned how to solve linear and nonlinear equations. Date Important Vocabulary Define each term or concept. Equation A statement, usually involving x, that two algebraic expressions are equal. Extraneous solution A solution that does not satisfy the original equation. Quadratic equation An equation in x that can be written in the general form 2 ax + bx + c = 0 where a, b, and c are real numbers with a ¹ 0. I. Equations and Solutions of Equations (Page 12) What you should learn How to identify different To solve an equation in x means to . find all the values of x types of equations for which the solution is true. The values of x for which the equation is true are called its solutions . An identity is . an equation that is true for every real number in the domain of the variable. A conditional equation is . an equation that is true for just some (or even none) of the real numbers in the domain of the variable. II. Linear Equations in One Variable (Pages 12-14) What you should learn A linear equation in one variable x is an equation that can be How to solve linear equations in one variable written in the standard form ax + b = 0 , where a and b and equations that lead to are real numbers with a ¹ 0 . linear equations A linear equation has exactly one solution(s). To solve a conditional equation in x, . isolate x on one side of the equation by a sequence of equivalent, and usually simpler, equations, each having the same solution(s) as the original equation. -
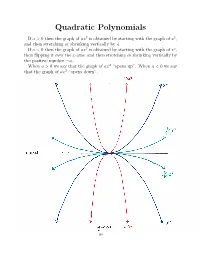
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola.