Determining Lightness from an Image
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Helmholtz-Kohlrausch Effect
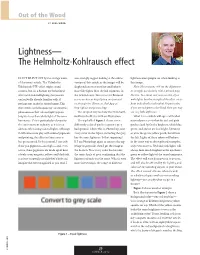
Out of the Wood BY MIKE WOOD Lightness— The Helmholtz-Kohlrausch effect Don’t be put off by the strange name also strongly suggest looking at the online lightness most people see when looking at of this issue’s article. The Helmholtz- version of this article, as the images will be this image. Kohlrausch (HK) effect might sound displayed on your monitor and behave Note: Not everyone will see the differences esoteric, but it’s a human eye behavioral more like lights than the ink pigments in as strongly, particularly with a printed page effect with colored lighting that you are the printed copy. You can access Protocol like this. Just about everyone sees this effect undoubtedly already familiar with, if issues on-line at http://plasa.me/protocol with lights, but the strength of the effect varies perhaps not under its formal name. This or through the iPhone or iPad App at from individual to individual. In particular, effect refers to the human eye (or entoptic) http://plasa.me/protocolapp. if you are red-green color-blind, then you may phenomenon that colored light appears The simplest way to show the Helmholtz- see very little difference. brighter to us than white light of the same Kohlrausch effect is with an illustration. What I see—which will agree with what luminance. This is particularly relevant to The top half of Figure 1 shows seven most of you see—is that the red and pink the entertainment industry, as it is most differently colored patches against a grey patches look by far the brightest, while blue, obvious when using colored lights. -

RAL-Product-2019-SC-1.Pdf
INHALT / PRODUKTÜBERSICHT / RAL FARBEN PRODUCT OVERVIEW RAL COLOURS – Innovation and reliability. Worldwide. RAL FARBEN / PRODUKTÜBERSICHT / INHALT RAL CLASSIC THE WORLD‘S LEADING INDUSTRIAL COLOUR COLLECTION The RAL CLASSIC colour collection has for 90 years been indispensable in the clear communication of colours and a guarantee for obtaining exactly the same colours – worldwide. APPLICATION EXAMPLES Steel sculpture by world famous sculptor Anish Kapoor and star architect Cecil Balmond is London’s Olympic landmark. The ArcelorMittal Orbit glows in RAL 3003 Ruby Red. Allmilmö – a leading premium brand manufacturer of high-quality kitchen furnishings – produces these kitchen models in RAL 1023 traffic yellow. A design classic that is available in various colours. The picture shows a model in RAL 1004 Golden yellow. Emergency exit signs have the colour RAL 6002 Leaf green. Thonet produces the S 43 cantilever chair by Mart Stam in 11 RAL colours. RAL CLASSIC / PRODUCT OVERVIEW / RAL COLOURS RAL 840-HR Primary standards with 213 RAL CLASSIC colours Semi matt A5-sized 14.8 x 21.0 cm Colour illustration A6-sized 10.5 x 14.8 cm Binding colour samples for colour matching and quality control RAL 840-HR | 841-GL Including XYZ-values, colour distance from the original standard and reflectance curve Single cards available RAL 841-GL Primary standards with 196 RAL CLASSIC colours High gloss Allmilmö – a leading premium brand manufacturer of high-quality kitchen furnishings – A5-sized 14.8 x 21.0 cm produces these kitchen models in RAL 1023 traffic yellow. Colour illustration A6-sized 10.5 x 14.8 cm Binding colour samples for colour matching and quality control Including XYZ-values, colour distance from the original standard and reflectance curve Single cards available 07 Thonet produces the S 43 cantilever chair by Mart Stam in 11 RAL colours. -

Color Appearance Models Today's Topic
Color Appearance Models Arjun Satish Mitsunobu Sugimoto 1 Today's topic Color Appearance Models CIELAB The Nayatani et al. Model The Hunt Model The RLAB Model 2 1 Terminology recap Color Hue Brightness/Lightness Colorfulness/Chroma Saturation 3 Color Attribute of visual perception consisting of any combination of chromatic and achromatic content. Chromatic name Achromatic name others 4 2 Hue Attribute of a visual sensation according to which an area appears to be similar to one of the perceived colors Often refers red, green, blue, and yellow 5 Brightness Attribute of a visual sensation according to which an area appears to emit more or less light. Absolute level of the perception 6 3 Lightness The brightness of an area judged as a ratio to the brightness of a similarly illuminated area that appears to be white Relative amount of light reflected, or relative brightness normalized for changes in the illumination and view conditions 7 Colorfulness Attribute of a visual sensation according to which the perceived color of an area appears to be more or less chromatic 8 4 Chroma Colorfulness of an area judged as a ratio of the brightness of a similarly illuminated area that appears white Relationship between colorfulness and chroma is similar to relationship between brightness and lightness 9 Saturation Colorfulness of an area judged as a ratio to its brightness Chroma – ratio to white Saturation – ratio to its brightness 10 5 Definition of Color Appearance Model so much description of color such as: wavelength, cone response, tristimulus values, chromaticity coordinates, color spaces, … it is difficult to distinguish them correctly We need a model which makes them straightforward 11 Definition of Color Appearance Model CIE Technical Committee 1-34 (TC1-34) (Comission Internationale de l'Eclairage) They agreed on the following definition: A color appearance model is any model that includes predictors of at least the relative color-appearance attributes of lightness, chroma, and hue. -

Appendix G: the Pantone “Our Color Wheel” Compared to the Chromaticity Diagram (2016) 1
Appendix G - 1 Appendix G: The Pantone “Our color Wheel” compared to the Chromaticity Diagram (2016) 1 There is considerable interest in the conversion of Pantone identified color numbers to other numbers within the CIE and ISO Standards. Unfortunately, most of these Standards are not based on any theoretical foundation and have evolved since the late 1920's based on empirical relationships agreed to by committees. As a general rule, these Standards have all assumed that Grassman’s Law of linearity in the visual realm. Unfortunately, this fundamental assumption is not appropriate and has never been confirmed. The visual system of all biological neural systems rely upon logarithmic summing and differencing. A particular goal has been to define precisely the border between colors occurring in the local language and vernacular. An example is the border between yellow and orange. Because of the logarithmic summations used in the neural circuits of the eye and the positions of perceived yellow and orange relative to the photoreceptors of the eye, defining the transition wavelength between these two colors is particularly acute.The perceived response is particularly sensitive to stimulus intensity in the spectral region from 560 to about 580 nanometers. This Appendix relies upon the Chromaticity Diagram (2016) developed within this work. It has previously been described as The New Chromaticity Diagram, or the New Chromaticity Diagram of Research. It is in fact a foundation document that is theoretically supportable and in turn supports a wide variety of less well founded Hering, Munsell, and various RGB and CMYK representations of the human visual spectrum. -

SAS/GRAPH ® Colors Made Easy Max Cherny, Glaxosmithkline, Collegeville, PA
Paper TT04 SAS/GRAPH ® Colors Made Easy Max Cherny, GlaxoSmithKline, Collegeville, PA ABSTRACT Creating visually appealing graphs is one of the most challenging tasks for SAS/GRAPH users. The judicious use of colors can make SAS graphs easier to interpret. However, using colors in SAS graphs is a challenge since SAS employs a number of different color schemes. They include HLS, HSV, RGB, Gray-Scale and CMY(K). Each color scheme uses different complex algorithms to construct a given color. Colors are represented as hard-to-understand hexadecimal values. A SAS user needs to understand how to use these color schemes in order to choose the most appropriate colors in a graph. This paper describes these color schemes in basic terms and demonstrates how to efficiently apply any color and its variation to a given graph without having to learn the underlying algorithms used in SAS color schemes. Easy and reusable examples to create different colors are provided. These examples can serve either as the stand-alone programs or as the starting point for further experimentation with SAS colors. SAS also provides CNS and SAS registry color schemes which allow SAS users to use plain English words for various shades of colors. These underutilized schemes and their color palettes are explained and examples are provided. INTRODUCTION Creating visually appealing graphs is one of the most challenging tasks for SAS users. Tactful use of color facilitates the interpretation of graphs by the reader. It also allows the writer to emphasize certain points or differentiate various aspects of the data in the graph. -
Color Appearance Models Second Edition
Color Appearance Models Second Edition Mark D. Fairchild Munsell Color Science Laboratory Rochester Institute of Technology, USA Color Appearance Models Wiley–IS&T Series in Imaging Science and Technology Series Editor: Michael A. Kriss Formerly of the Eastman Kodak Research Laboratories and the University of Rochester The Reproduction of Colour (6th Edition) R. W. G. Hunt Color Appearance Models (2nd Edition) Mark D. Fairchild Published in Association with the Society for Imaging Science and Technology Color Appearance Models Second Edition Mark D. Fairchild Munsell Color Science Laboratory Rochester Institute of Technology, USA Copyright © 2005 John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England Telephone (+44) 1243 779777 This book was previously publisher by Pearson Education, Inc Email (for orders and customer service enquiries): [email protected] Visit our Home Page on www.wileyeurope.com or www.wiley.com All Rights Reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning or otherwise, except under the terms of the Copyright, Designs and Patents Act 1988 or under the terms of a licence issued by the Copyright Licensing Agency Ltd, 90 Tottenham Court Road, London W1T 4LP, UK, without the permission in writing of the Publisher. Requests to the Publisher should be addressed to the Permissions Department, John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England, or emailed to [email protected], or faxed to (+44) 1243 770571. This publication is designed to offer Authors the opportunity to publish accurate and authoritative information in regard to the subject matter covered. -

PRECISE COLOR COMMUNICATION COLOR CONTROL from PERCEPTION to INSTRUMENTATION Knowing Color
PRECISE COLOR COMMUNICATION COLOR CONTROL FROM PERCEPTION TO INSTRUMENTATION Knowing color. Knowing by color. In any environment, color attracts attention. An infinite number of colors surround us in our everyday lives. We all take color pretty much for granted, but it has a wide range of roles in our daily lives: not only does it influence our tastes in food and other purchases, the color of a person’s face can also tell us about that person’s health. Even though colors affect us so much and their importance continues to grow, our knowledge of color and its control is often insufficient, leading to a variety of problems in deciding product color or in business transactions involving color. Since judgement is often performed according to a person’s impression or experience, it is impossible for everyone to visually control color accurately using common, uniform standards. Is there a way in which we can express a given color* accurately, describe that color to another person, and have that person correctly reproduce the color we perceive? How can color communication between all fields of industry and study be performed smoothly? Clearly, we need more information and knowledge about color. *In this booklet, color will be used as referring to the color of an object. Contents PART I Why does an apple look red? ········································································································4 Human beings can perceive specific wavelengths as colors. ························································6 What color is this apple ? ··············································································································8 Two red balls. How would you describe the differences between their colors to someone? ·······0 Hue. Lightness. Saturation. The world of color is a mixture of these three attributes. -
Colour Theory COLOUR THEORY Colour Wheel & Colour Types Colour Is the Element of Art That Refers to Reflected Light
Colour Theory COLOUR THEORY Colour Wheel & Colour Types Colour is the element of art that refers to reflected light. Colour Theory is both the science and the art of using colour. It explains how humans see colour and how colours mix, match, or contrast with each other. The colour wheel is a visual representation of colours arranged according to their chromatic relationship. Sir Isaac Newton developed the first circular diagram of colours in the1600’s! Newton observed the way each colour of light would bend as it passed through a prism. “ROY G BIV” was the result of Newton’s discovery. His experiments led to the theory that red, yellow and blue were the primary colours from which all other colours are derived. In Newton’s color wheel (below left), the colors are arranged clockwise in the order they appear in the rainbow, each “spoke” of the wheel is assigned a letter. The Colour Wheel we know and recognize today has 12 fundamental colours: yellow, yellow-orange, orange, red-orange, red, red-violet, violet, blue-violet, blue, blue-green, green, and yellow-green. Color Circle by Sir Isaac Newton, (1672) Farbkreis by Johannes Itten, Art of Colour, (1961) woodstockartgallery.ca Colour Theory The primary colours are yellow, red, and blue. No two colours can be mixed to create a PRIMARY primary colour. All other colours found on the colour wheel can be created by mixing primary colours. The secondary colours are orange, violet, and SECONDARY green which are created by mixing equal parts of any two primary colours Tertiary colours are created by mixing equal parts of a secondary colour and a primary TERTIARY colour. -

HUE, VALUE, SATURATION All Color Starts with Light
HUE, VALUE, SATURATION What is color? Color is the visual byproduct of the spectrum of light as it is either transmitted through a transparent medium, or as it is absorbed and reflected off a surface. Color is the light wavelengths that the human eye receives and processes from a reflected source. Color consists of three main integral parts: hue value saturation (also called “chroma”) HUE - - - more specifically described by the dominant wavelength and is the first item we refer to (i.e. “yellow”) when adding in the three components of a color. Hue is also a term which describes a dimension of color we readily experience when we look at color, or its purest form; it essentially refers to a color having full saturation, as follows: When discussing “pigment primaries” (CMY), no white, black, or gray is added when 100% pure. (Full desaturation is equivalent to a muddy dark grey. True black is not usually possible in the CMY combination.) When discussing spectral “light primaries” (RGB), a pure hue equivalent to full saturation is determined by the ratio of the dominant wavelength to other wavelengths in the color. VALUE - - - refers to the lightness or darkness of a color. It indicates the quantity of light reflected. When referring to pigments, dark values with black added are called “shades” of the given hue name. Light values with white pigment added are called “tints” of the hue name. SATURATION - - - (INTENSITY OR CHROMA) defines the brilliance and intensity of a color. When a pigment hue is “toned,” both white and black (grey) are added to the color to reduce the color’s saturation. -

Product Overview
INHALT / PRODUKTÜBERSICHT / RAL FARBEN PRODUCT OVERVIEW RAL COLOURS – Innovation and reliability. Worldwide. MEMBERSHIPS Deutsches Mode-Institut China National Deutsche Coatings Industry Farbwissenschaftliche Association Gesellschaft AWARDS CONTENT / PRODUCT OVERVIEW / RAL COLOURS CONTENT RAL CLASSIC The world’s leading collection of industrial colours RAL 840-HR 07 RAL 841-GL 07 RAL K1 / RAL K1 INDIVIDUAL 08 RAL K5 / RAL K5 INDIVIDUAL 09 RAL K6 10 | RAL EFFECT | RAL DESIGN SYSTEM RAL CLASSIC RAL K7 / RAL K7 INDIVIDUAL 10-11 RAL F9 11 RAL DESIGN SYSTEM The CIELab-based colour system RAL D2 / RAL D2 INDIVIDUAL 13 RAL D4 14 RAL DESIGN SYSTEM SINGLE SHEET 14 RAL D6 15 RAL D8 15 RAL EFFECT The innovative RAL EFFECT Colours RAL E1 17 RAL E3 & E4 18 RAL EFFECT SINGLE SHEET 19 03 RAL COLOURS / PRODUCT OVERVIEW / CONTENT RAL PLASTICS The RAL colour standard for plastics RAL P1 21 RAL P2 22 RAL P1 + P2 SET 23 RAL P1 + P2 SINGLE PLATES 23 RAL DIGITAL The RAL colours for computers and smartphones RAL DIGITAL Version 5.0 25 RAL COLORCATCH NANO 26 RAL iCOLOURS 27 RAL ACADEMY | RAL DIGITAL | RAL PLASTICS | RAL DIGITAL RAL ACADEMY RAL ACADEMY Training of colour designers at a very high level RAL ACADEMY 29 04 CONTENT / PRODUCT OVERVIEW / RAL COLOURS RAL BOOKS Suggestions, insights and trends for the world of colours RAL COLOUR FEELING 2016+ The colour trend book for everyone dealing 31 with trends THE COLOUR DICTIONARY The reference work for interior design, 32 advertising, design and teaching RAL BOOKS | RAL COLOURS RAL BOOKS COLOUR MASTER The inspiring, interactive design book with 34 endless possibilities for creative people COLOURS FOR HOTELS 36 The planning manual for designers in the hotel sector RAL COLOURS Distribution partners RAL COLOURS WORLDWIDE 38 05 RAL FARBEN / PRODUKTÜBERSICHT / INHALT RAL CLASSIC THE WORLD‘S LEADING INDUSTRIAL COLOUR COLLECTION The RAL CLASSIC colour collection has for 90 years been indispensable in the clear communication of colours and a guarantee for obtaining exactly the same colours – worldwide. -
Introduction to Color Appearance Models Outline
Introduction to Color Appearance Models Arto Kaarna Lappeenranta University of Technology Department of Information Technology P.O. Box 20 FIN-53851 Lappeenranta, Finland [email protected] Basics of CAM … 1/81 Outline 1. Definitions 3 2. Color Appearance Phenomena 15 3. Chromatic Adaptation 44 4. Color appearance models 59 5. CIECAM02 65 Literature 80 Basics of CAM … 2/81 1 Definitions Needed for uniform and universal description Precise for mathematical manipulation International Lighting Vocabulary (CIE, 1987) Within color science Color Hue Brightness Lightness Colorfulness Chroma Saturation Unrelated and Related Colors Basics of CAM … 3/81 Definitions Color Visual perception of chromatic or achromatic content •Yellow, blue, red, etc •White, gray, black, etc. •Dark, dim, bright, light, etc. NOTE: perceived color depends on the spectral distribution of the stimulus, size, shape, structure, and surround •Also state of adaptation of the observer Both physical, physiological, psyckological and cognitive variables New attempt: visual stimulus without spatial or temporal variations More detailed definition needed using more parameters for numeric expression Basics of CAM … 4/81 2 Definitions Hue Visual sensation similar to one of the perceived colors: red, yellow, green, and blue or their combination Chromatic color: posessing a hue, achromatic no hue Munsell book of color No hue with zero value Achromatic colors Basics of CAM … 5/81 Definitions Brightness A visual sensation according to which an area emits more or less light An absolute -

1. White's Effect in Lightness, Color and Motion
1. White’s effect in lightness, color and motion Stuart Anstis Abstract In White’s (1979) illusion of lightness, the background is a square-wave grating of black and white stripes (Fig. 1a). Grey segments that replace parts of the black stripes look much lighter than grey segments that replace parts of the white stripes. Assimi- lation from flanking stripes has been proposed, the opposite of simultaneous contrast. We use colored patterns to demonstrate that the perceived hue shifts are a joint func- tion of contrast and assimilation. Simultaneous contrast was relatively stronger at low spatial frequencies, assimilation at high. Both the chromatic and achromatic versions of White’s effect were stronger at high spatial frequencies. “Geometrical” theories attempt to explain White’s effect with T-junctions, anisotropic lateral inhibition, and elongated receptive fields. But an isotropic random-dot illusion of lightness called “Stuart’s Rings” resists any anisotropic explanations. White’s illusion also affects mo- tion perception. In “crossover motion,” a white and a black bar side by side abruptly exchange luminances on a gray surround. Direction of seen motion depends upon the relative contrast of the bars. On a light [dark] surround the black [white] bar is seen as moving. Thus the bar with the higher contrast is seen as moving in a winner-take-all computation. But if the bars are embeddedin long vertical lines, the luminance of these lines is 2.3 times more effective than the surround luminance in determining the seen motion. Thus motion strength is dependent upon White’s effect and is computed after it.