News Release
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Musical Taiwan Under Japanese Colonial Rule: a Historical and Ethnomusicological Interpretation
MUSICAL TAIWAN UNDER JAPANESE COLONIAL RULE: A HISTORICAL AND ETHNOMUSICOLOGICAL INTERPRETATION by Hui‐Hsuan Chao A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Music: Musicology) in The University of Michigan 2009 Doctoral Committee: Professor Joseph S. C. Lam, Chair Professor Judith O. Becker Professor Jennifer E. Robertson Associate Professor Amy K. Stillman © Hui‐Hsuan Chao 2009 All Rights Reserved ACKNOWLEDGEMENTS Throughout my years as a graduate student at the University of Michigan, I have been grateful to have the support of professors, colleagues, friends, and family. My committee chair and mentor, Professor Joseph S. C. Lam, generously offered his time, advice, encouragement, insightful comments and constructive criticism to shepherd me through each phase of this project. I am indebted to my dissertation committee, Professors Judith Becker, Jennifer Robertson, and Amy Ku’uleialoha Stillman, who have provided me invaluable encouragement and continual inspiration through their scholarly integrity and intellectual curiosity. I must acknowledge special gratitude to Professor Emeritus Richard Crawford, whose vast knowledge in American music and unparallel scholarship in American music historiography opened my ears and inspired me to explore similar issues in my area of interest. The inquiry led to the beginning of this dissertation project. Special thanks go to friends at AABS and LBA, who have tirelessly provided precious opportunities that helped me to learn how to maintain balance and wellness in life. ii Many individuals and institutions came to my aid during the years of this project. I am fortunate to have the friendship and mentorship from Professor Nancy Guy of University of California, San Diego. -

How Corals Think 珊瑚如何思考 媒材:雙聲道喇叭、數位輸出(裱貼於木板)、聲音
!"##$%&'(")*+','-.#/0)'123.4$5.#6"7'89)#:'86):$9',';<=>' !"#$%&'"(!")*+"#,-.'/0'/,&1*0'! ! ' %23'425678',9:;<'' ' )"!0),'' ' ! ! =6;;:><'16?@A! #$!%$&'()%*+%,-%$#(.!#,,(/#+0! 1.! ! ! ! ! &;BC536DC5'/2?;B')C>25B:;E'20'3'!4! F'! 42567')CCG8'->2?8D:>'/?5HCA' ! "! Yannick Dauby - Penghu Experimental Sound Studio - 2018 Introduction 計劃緣起 Since 2004, I am regularly visiting Penghu archipelogo, located in the Taiwan Strait. During my stays on the islands, I spend time observing the marine fauna and experiment with sound recording techniques. In 2009 was published the book "Village, Vestiges", in collaboration with Wan- Shuen Tsai, which contains a large part devoted to traditional houses of Penghu made of coral. Since 2013, and every two years, we organize a longer stay, several months for developping art projects and educational activities. In 2015, we made a teaching project in the remote islands of Penghu, which was concluded by a video creation, shown in Sydney Biennale 2016, entitled "Childhood of an Archipelago". In 2017, after meeting with local divers and biologists I decided to start a project related to the underwater sounds, especially in coral reefs. That first session, without fundings, was the begining of an experimental platform and archive. This first steps led to the exhibition "How Corals Think" (exhibited in Kaohsiung Fine Arts Museume, Kosovo Biennale, TheCube gallery in Taipei, and under a radio form for Documenta #14 all in 2018, and in Penghu Reclamation Hall in 2019). This year 2018, I got a grant by National Fundation for the Arts , for developping this project in between art practice, audio-visual creation and ecology. -

Deterrence and Clarity: U.S. Security Policy in the Asian-Pacific, 1950-1970 Clifton W
Florida State University Libraries Electronic Theses, Treatises and Dissertations The Graduate School 2003 Deterrence and Clarity: U.S. Security Policy in the Asian-Pacific, 1950-1970 Clifton W. Sherrill Follow this and additional works at the FSU Digital Library. For more information, please contact [email protected] THE FLORIDA STATE UNIVERSITY COLLEGE OF SOCIAL SCIENCES DETERRENCE AND CLARITY: U.S. SECURITY POLICY IN THE ASIAN-PACIFIC, 1950-1970 By CLIFTON W. SHERRILL A Dissertation submitted to the Department of Political Science in partial fulfillment of the requirements for the degree of Doctor of Philosophy Degree Awarded: Fall Semester, 2003 Copyright © 2003 Clifton W. Sherrill All Rights Reserved The members of the Committee approve the dissertation of Clifton W. Sherrill defended on October 22, 2003. ______________________________ Dale L. Smith Professor Directing Dissertation ______________________________ James P. Jones Outside Committee Member ______________________________ William R. Van Cleave Committee Member ______________________________ Thomas M. Carsey Committee Member ______________________________ Paul R. Hensel Committee Member Approved: ___________________________________________________ Dale L. Smith, Chairman, Department of Political Science The Office of Graduate Studies has verified and approved the above named committee members. ii TABLE OF CONTENTS List of Tables ..................................................................................................................... v List of Figures .................................................................................................................... -

Burchje2013.Pdf
“The Taiwan Straits Crisis of 1954-1955: The Contemplation of Going to War Over Foreign Troop Morale” Justin E. Burch Masters Thesis Spring 2013 Graduate Committee: Dr. Xiao Bing Li, Dr. Stanley Adamiak, Dr. Jeff Plaks. Table of Contents Chapter One: Introduction & Historiographical Background 1-14 to the Taiwan Straits Crisis of 1954-1955. Chapter Two: The US-Taiwan Defense Treaty and its Impact 15-44 On the Taiwan Straits Crisis of 1954-19455. Chapter Three: Aftermath: Eisenhower and Dulles Re-evaluate 45-75 a Failing Strategy. Chapter Four: Stalemate: the Robertson-Radford Mission, 76-103 Bandung, Negotiation, and the 1958 Crisis. Notes 104-116 Bibliography 117-126 Maps Appendices 1-9 Attachment: U.S. Policy Towards Nationalist China 1 Chapter One: Introduction & Historiographical Background to the Taiwan Straits Crisis of 1954-1955 On September 3, 1954, the People’s Republic of China (PRC) began a barrage of artillery fire on the island of Quemoy1 controlled by the Republic of China (ROC) off the mainland China coast near the port of Amoy. The ROC had occupied Quemoy, along with other offshore islands, since Jiang Jieshi’s (Chiang Kai-shek) Nationalist Kuomintang (KMT) government fled to Taiwan in 1949 as Mao Zedong (Mao Tse-tung) and his Communist forces consolidated control over China. This attack on Quemoy began the first Taiwan Straits Crisis of 1954-55. The shelling of this small island precipitated an international confrontation that lasted over ten months. Ten months that gripped the entire world in fear of a third world war and the very real possibility of an atomic exchange. -

News Release
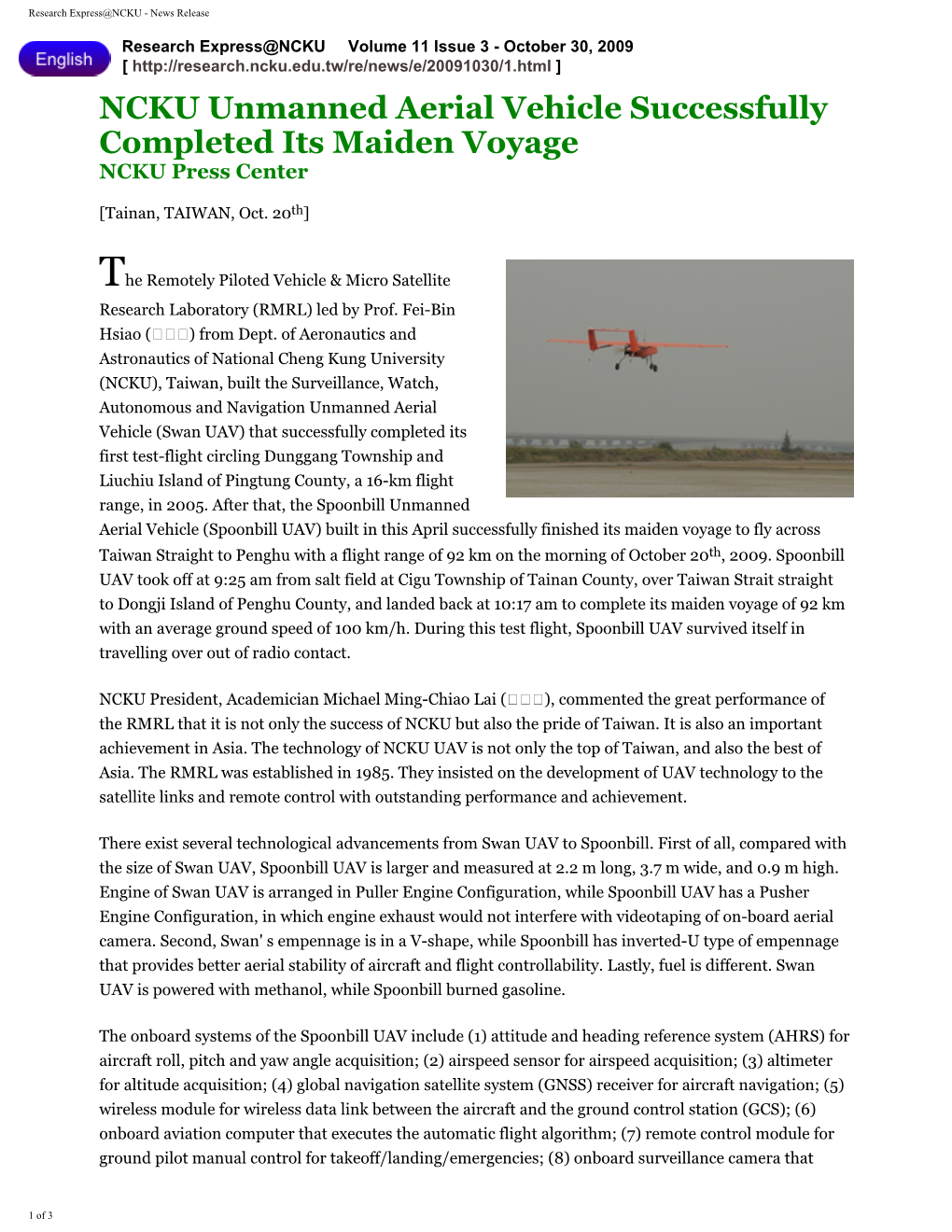
Research Express@NCKU - News Release Research Express@NCKU Volume 11 Issue 3 - October 30, 2009 [ http://research.ncku.edu.tw/re/news/e/20091030/1.html ] NCKU Unmanned Aerial Vehicle Successfully Completed Its Maiden Voyage NCKU Press Center [Tainan, TAIWAN, Oct. 20th] The Remotely Piloted Vehicle & Micro Satellite Research Laboratory (RMRL) led by Prof. Fei-Bin Hsiao (蕭飛賓) from Dept. of Aeronautics and Astronautics of National Cheng Kung University (NCKU), Taiwan, built the Surveillance, Watch, Autonomous and Navigation Unmanned Aerial Vehicle (Swan UAV) that successfully completed its first test-flight circling Dunggang Township and Liuchiu Island of Pingtung County, a 16-km flight range, in 2005. After that, the Spoonbill Unmanned Aerial Vehicle (Spoonbill UAV) built in this April successfully finished its maiden voyage to fly across Taiwan Straight to Penghu with a flight range of 92 km on the morning of October 20th, 2009. Spoonbill UAV took off at 9:25 am from salt field at Cigu Township of Tainan County, over Taiwan Strait straight to Dongji Island of Penghu County, and landed back at 10:17 am to complete its maiden voyage of 92 km with an average ground speed of 100 km/h. During this test flight, Spoonbill UAV survived itself in travelling over out of radio contact. NCKU President, Academician Michael Ming-Chiao Lai (賴明詔), commented the great performance of the RMRL that it is not only the success of NCKU but also the pride of Taiwan. It is also an important achievement in Asia. The technology of NCKU UAV is not only the top of Taiwan, and also the best of Asia. -

Learning from the Stones: a Go Approach to Mastering China's
LEARNING FROM THE STONES: A GO APPROACH TO MASTERING CHINA’S STRATEGIC CONCEPT, SHI David Lai May 2004 Visit our website for other free publication downloads http://www.carlisle.army.mil/ssi To rate this publication click here. i ***** The author sincerely thanks Eric E. Fox, Lt Colonel USAF, for coining the title of this study—Learning from the Stones. ***** The views expressed in this report are those of the author and do not necessarily reflect the official policy or position of the Department of the Air Force, the Department of the Army, the Department of Defense, or the U.S. Government. This report is cleared for public release; distribution is unlimited. ***** Comments pertaining to this report are invited and should be forwarded to: Director, Strategic Studies Institute, U.S. Army War College, 122 Forbes Ave, Carlisle, PA 17013-5244. Copies of this report may be obtained from the Publications Office by calling (717) 245-4133, FAX (717) 245-3820, or by e-mail at [email protected] ***** All Strategic Studies Institute (SSI) monographs are available on the SSI Homepage for electronic dissemination. SSI‟s Homepage address is: http:// www.carlisle.army.mil/ssi/ ***** The Strategic Studies Institute publishes a monthly e-mail newsletter to update the national security community on the research of our analysts, recent and forthcoming publications, and upcoming conferences sponsored by the Institute. Each newsletter also provides a strategic commentary by one of our research analysts. If you are interested in receiving this newsletter, please let us know by e-mail at [email protected] or by calling (717) 245-3133. -

Travel & Culture 2018
July 2018 | Vol. 48 | Issue 7 THE AMERICAN CHAMBER OF COMMERCE IN TAIPEI IN OF COMMERCE THE AMERICAN CHAMBER TAIWAN BUSINESS TOPICS TAIWAN July 2018 | Vol. 48 | Issue 7 Vol. July 2018 | TRAVEL & 中 華 郵 政 北 台 字 第 CULTURE 2018 5000 號 執 照 登 記 為 雜 誌 交 寄 ISSUE SPONSOR Published by the American Chamber Of Read TOPICS Online at topics.amcham.com.tw NT$150 Commerce In Taipei 7_2018_Cover.indd 1 2018/7/1 下午10:22 CONTENTS 6 Taiwanese Puppetry – Continuing a Rich Tradition While evolving from outdoor JULY 2018 VOLUME 48, NUMBER 7 一○七年七月號 performances in villages and city neighborhoods to television and the internet, budaixi has main- 發行人 Publisher tained its popularity. William Foreman 傅維廉 By Stephanie Huffman Editor-in-Chief 總編輯 Don Shapiro 沙蕩 Associate Editor 副主編 10 Looking Beyond the Tim Ferry 法緹姆 Obvious in Miaoli 美術主任 Art Director/ / The north-central county may Production Coordinator 後製統籌 Katia Chen 陳國梅 not be on most tourist itinerar- Manager, Publications Sales & Marketing 廣告行銷經理 ies, but it contains a number of Caroline Lee 李佳紋 worthwhile attractions. By Steven Crook American Chamber of Commerce in Taipei 16 Taiwan’s Hawaii is in Hot 129 MinSheng East Road, Section 3, 7F, Suite 706, Taipei 10596, Taiwan Water P.O. Box 17-277, Taipei, 10419 Taiwan Tel: 2718-8226 Fax: 2718-8182 Kenting’s tourist arrivals have e-mail: [email protected] website: http://www.amcham.com.tw plunged amidst complaints 名稱:台北市美國商會工商雜誌 發行所:台北市美國商會 about service quality, prices, 臺北市10596民生東路三段129號七樓706室 and litter. 電話:2718-8226 傳真:2718-8182 By Matthew Fulco Taiwan Business TOPICS is a publication of the American Chamber of Commerce in Taipei, ROC. -

Stakeholder Engagement in the Designation Process of the Marine Protected Areas in Taiwan: a Social-Ecological System Perspective
Stakeholder Engagement in the Designation Process of the Marine Protected Areas in Taiwan: A Social-Ecological System Perspective Meihui Huang A thesis submitted in partial fulfillment of the requirements for the degree of Master of Marine Affairs University of Washington 2014 Committee: David Fluharty Marc Miller Program Authorized to Offer Degree: Marine and Environmental Affairs i © Copyright 2014 Meihui Huang ii University of Washington Abstract Meihui Huang Stakeholder Engagement in the Designation Process of the Marine Protected Areas in Taiwan: A Social-Ecological System Perspective Chair of the Supervisory Committee: Associate Professor David Fluharty School of Marine and Environmental Affairs There are many islands in the ocean surrounding Taiwan which can provide rich resources for the people such as fisheries. However, Taiwan is facing environmental issues from increasing human activities and the functions of natural systems that are weakened large anthropogenic disturbances. The concept of resilience is introduced to explain the unbalanced interactions and feedbacks between social and ecological system would impede recovery in the natural process and negatively impact on the social system. This study examines the Social Ecological System (SES)approach as a tool, which gives the decision maker a holistic picture of the complexity of the interactions between the human system and the natural environment system regarding the Marine Protected Areas (MPA) designation. iii To apply this idea to a real world case, this research examines three case studies in Taiwan, i.e., the Green Island case as a failure in establishing a MPA; the Dongsha Atoll National Park as a successful case of marine national park establishment in Taiwan.