Hall Effect Sensing and Application
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
1002661 Electromagnetic Experiment Set
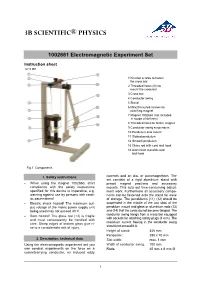
3B SCIENTIFIC® PHYSICS 1002661 Electromagnetic Experiment Set Instruction sheet 12/15 MH 1 Knurled screws to fasten the cross bar 2 Threaded holes (5x) to mount the cross bar 3 Cross bar 4 Conductor swing 5 Stand 6 M8x20 knurled screws for attaching magnet 7 Magnet 1002660 (not included in scope of delivery) 8 Threaded holes to fasten magnet 9 Conductor swing suspenders 10 Pendulum axle mount 11 Slotted pendulum 12 Smooth pendulum 13 Glass rod with cord and hook 14 Aluminium rod with cord and hook Fig.1: Components 1. Safety instructions currents and on dia- or paramagnetism. The set consists of a rigid aluminium stand with When using the magnet 1002660, strict preset magnet positions and accessory compliance with the safety instructions mounts. This cuts out time-consuming adjust- specified for this device is imperative, e.g. ment work. Furthermore all accessory compo- warning against use by persons with cardi- nents can be fastened onto the stand for ease ac pacemakers! of storage. The pendulums (11), (12) should be Electric shock hazard! The maximum out- suspended in the middle of the two slots of the put voltage of the mains power supply unit pendulum mount and glass or aluminium rods (13) being used may not exceed 40 V. and (14) that the cords do not become tangled. The conductor swing hangs from a cross bar equipped Burn hazard! The glass rod (13) is fragile with sockets for attaching safety plugs (4 mm). The and must consequently be handled with maximum current flowing in the conductor swing care. Sharp edges of broken glass give ri- se to a considerable risk of injury. -

Current Measurement in Power Electronic and Motor Drive Applications - a Comprehensive Study
Scholars' Mine Masters Theses Student Theses and Dissertations Fall 2007 Current measurement in power electronic and motor drive applications - a comprehensive study Asha Patel Follow this and additional works at: https://scholarsmine.mst.edu/masters_theses Part of the Electrical and Computer Engineering Commons Department: Recommended Citation Patel, Asha, "Current measurement in power electronic and motor drive applications - a comprehensive study" (2007). Masters Theses. 4581. https://scholarsmine.mst.edu/masters_theses/4581 This thesis is brought to you by Scholars' Mine, a service of the Missouri S&T Library and Learning Resources. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. CURRENT MEASUREMENT IN POWER ELECTRONIC AND MOTOR DRIVE APPLICATIONS – A COMPREHENSIVE STUDY by ASHABEN MEHUL PATEL A THESIS Presented to the Faculty of the Graduate School of the UNIVERSITY OF MISSOURI-ROLLA In Partial Fulfillment of the Requirements for the Degree MASTER OF SCIENCE IN ELECTRICAL ENGINEERING 2007 Approved by _______________________________ _______________________________ Dr. Mehdi Ferdowsi, Advisor Dr. Keith Corzine ____________________________ Dr. Badrul Chowdhury © 2007 ASHABEN MEHUL PATEL All Rights Reserved iii ABSTRACT Current measurement has many applications in power electronics and motor drives. Current measurement is used for control, protection, monitoring, and power management purposes. Parameters such as low cost, accuracy, high current measurement, isolation needs, broad frequency bandwidth, linearity and stability with temperature variations, high immunity to dv/dt, low realization effort, fast response time, and compatibility with integration process are required to ensure high performance of current sensors. -
Week 10: Oct 27, 2016 Preamble to Quantum Hall Effect: Exotic
Week 10: Oct 27, 2016 Preamble to Quantum Hall Effect: Exotic Phenomenon in Quantum Physics The quantum Hall effect is one of the most remarkable of all quantum-matter phenomena, quite unanticipated by the physics community at the time of its discovery in 1980. This very surprising discovery earned von Klitzing the Nobel Prize in physics in 1985. The basic experimental observation is the quantization of resistance, in two-dimensional systems, to an extreme precision, irrespective of the sample’s shape and of its degree of purity. This intriguing phenomenon is a manifestation of quantum mechanics on a macroscopic scale, and for that reason, it rivals superconductivity and Bose–Einstein condensation in its fundamental importance. As we will see later in this class, that this effect is an example of Berry phase and the “quanta” that appear in the quantization of Hall conductivity are the topological integers that emerge from quantum analog of Gauss-Bonnet theorem. This years Nobel prize to David Thouless is for explaining this exotic quantization in terms of topology. It turns out that the classical and quantum anholonomy are described by the same mathematics. To understand that, we need to introduce the concept of “curvature. As we know, it is the curved space that leads to anholonomy in classical physics. This allows us to define curvature in quantum physics. That is, using the concept of anholonomy in quantum physics, we can define the concept of curvature in quantum physics – that is, in Hilbert space. Curvature leads us to Topological Invariants that tells us that anholonomy may have its roots in topology. -

Design and Construction of a Tachometer
Design and Construction of a Tachometer Author: David Tisaj November 2014 Supervisors: Dr Sujeewa Hettiwatte & Dr Gareth Lee Project Outline In this project the student will design and construct a contact-less tachometer which could be used in the power engineering lab. The output should be a 6-digit display of revs/min and radians per second. The device should enable the use of several sensors (such as optical or Hall Effect). The device should be tested to demonstrate the ability to display at least 5 significant figures after a reasonable gating period. 2 I Acknowledgements I’d like to say thank you to Dr Gareth Lee for being my supervisor and coach throughout this thesis and Dr Sujeewa Hettiwatte for providing project specifications. I’d like to thank Mr Iafeta Laava for helping me build my circuit and attaching wires with headers very neatly which made my circuit look professional. I’d also like to thank my family and friends for pushing me through involving: my parents, Dusan Sibanic, Warwick Smith, Holly Poole, and Lyrian Evans. I’d like to thank “that computer shop” for recovering part of my thesis after I incurred a corrupt hard drive. Note to self and others: back up your work! And finally I’d like to thank all the websites online who have relinquished their copyright so it can be used in this thesis to explain topics in more clarity. 3 II Abstract The purpose of this report is to provide a guided tour of how everything was achieved by choosing the right parts, implementation and building, testing, results and of course to inspire future projects and students into making student level tachometers because they all come in different shapes and sizes. -
Topological Insulators Physicsworld.Com Topological Insulators This Newly Discovered Phase of Matter Has Become One of the Hottest Topics in Condensed-Matter Physics
Feature: Topological insulators physicsworld.com Topological insulators This newly discovered phase of matter has become one of the hottest topics in condensed-matter physics. It is hard to understand – there is no denying it – but take a deep breath, as Charles Kane and Joel Moore are here to explain what all the fuss is about Charles Kane is a As anyone with a healthy fear of sticking their fingers celebrated by the 2010 Nobel prize – that inspired these professor of physics into a plug socket will know, the behaviour of electrons new ideas about topology. at the University of in different materials varies dramatically. The first But only when topological insulators were discov- Pennsylvania. “electronic phases” of matter to be defined were the ered experimentally in 2007 did the attention of the Joel Moore is an electrical conductor and insulator, and then came the condensed-matter-physics community become firmly associate professor semiconductor, the magnet and more exotic phases focused on this new class of materials. A related topo- of physics at University of such as the superconductor. Recent work has, how- logical property known as the quantum Hall effect had California, Berkeley ever, now uncovered a new electronic phase called a already been found in 2D ribbons in the early 1980s, and a faculty scientist topological insulator. Putting the name to one side for but the discovery of the first example of a 3D topologi- at the Lawrence now, the meaning of which will become clear later, cal phase reignited that earlier interest. Given that the Berkeley National what is really getting everyone excited is the behaviour 3D topological insulators are fairly standard bulk semi- Laboratory, of materials in this phase. -

Dynamic Differential Hall Effect Sensor TLE4926C-HT E6547
Dynamic Differential Hall Effect Sensor TLE4926C-HT E6547 Data Sheet Version 1.1 Features • High sensitivity • Single chip solution • Symmetrical thresholds PG-SSO-3-92 • High resistance to Piezo effects • South and north pole pre-induction possible • Low cut-off frequency • Digital output signal • Advanced performance by dynamic self calibration principle • Two-wire and three-wire configuration possible • Wide operating temperature range • Fast start-up time • Large operating air-gaps • Reverse voltage protection at Vs- PIN • Short- circuit and over temperature protection of output • Digital output signal (voltage interface) • Module style package with two integrated capacitors: • 4.7nF between Q and GND 1 • 47nF between VS and GND: Needed for micro cuts in power supply Type Marking Ordering Code Package TLE4926C-HT E6547 26D8 SP000718258 PG-SSO-3-92 1 value of capacitor: 47nF±10%; (excluded drift due to temperature and over lifetime); ceramic: X8R; maximum voltage: 50V. Data Sheet Page 1 of 25 General Information The TLE4926C-HT E6547 is an active Hall sensor suited to detect the motion and position of ferromagnetic and permanent magnet structures. An additional self-calibration module has been implemented to achieve optimum accuracy during normal running operation. It comes in a three-pin package for the supply voltage and an open drain output. VS GND Q 47nF 4.7nF Figure 1: Pin configuration PG-SSO-3-92 Pin definition and Function Pin No. Symbol Function 1 VS Supply Voltage 2 GND Ground 3 Q Open Drain Output Functional Description The differential Hall sensor IC detects the motion and position of ferromagnetic and permanent magnet structures by measuring the differential flux density of the magnetic field. -

Use of Hall Effect Sensors for Protection and Monitoring Applications March 2018 Use of Hall Effect Sensors for Protection and Monitoring Applications
PSRC I24 Use of Hall Effect Sensors for Protection and Monitoring Applications March 2018 Use of Hall Effect Sensors for Protection and Monitoring Applications A report to the Relaying Practices Subcommittee I Power System Relaying and Control Committee IEEE Power & Energy Society Prepared by Working Group I-24 Working Group Assignment Report on the use of Hall Effect Sensors for Protection and Monitoring Applications. The report will discuss the technology, and compare with other sensing technologies. Working Group Members Jim Niemira – Chair Jeff Long – Vice Chair Jeff Burnworth John Buffington Amir Makki Mario Ranieri George Semati Alex Stanojevic Mark Taylor Phil Zinck Page 1 of 32 PSRC I24 Use of Hall Effect Sensors for Protection and Monitoring Applications March 2018 TABLE OF CONTENTS Working Group Assignment .......................................................................................................................... 1 Working Group Members ............................................................................................................................. 1 1 Introduction .......................................................................................................................................... 5 2 Theory – What is Hall Effect .................................................................................................................. 5 3 Current Sensing Hall Effect Sensors ...................................................................................................... 6 4 Sensor Types -
Introduction to Magnetic Current Sensing.Pdf
Introduction to Magnetic Current Sensing TI Precision Labs – Magnetic Sensors Presented and prepared by Ian Williams 1 Hello, and welcome to the TI precision labs series on magnetic sensors. My name is Ian Williams, and I’m the applications manager for current sensing products. In this video, we will give an introduction to magnetic current sensing, including: a comparison of direct vs. indirect sensing, review of Ampere’s law, and overview of different magnetic current sensing technologies. 2 Direct (shunt-based) current sensing • Things to know: – Based on Ohm’s law – Shunt resistor in series with load – Invasive measurement RSHUNT adds to system load Iload – Sensing circuit not isolated from system load • Recommend when: + + Vshunt R shunt + – Currents are < 100A - • Higher currents possible with appropriate shunt resistor and Vo design techniques - – System can tolerate power loss P = I2R – Low voltage 100V or less GND – Load current not very dynamic – Isolation not required (though it can be accomplished) See: TI Precision Labs – Current Sense Amplifiers 2 Direct, or shunt-based, current sensing is based on Ohm’s law. By placing a shunt resistor in series with the system load, a voltage is generated across the shunt resistor that is proportional to the system load current. The voltage across the shunt can be measured by differential amplifiers such as current sense amplifiers (CSAs), operational amplifiers (op amps), difference amplifiers (DAs), or instrumentation amplifiers (IAs). This method is an invasive measurement of the current since the shunt resistor and sensing circuitry are electrically connected to the monitored system. Therefore, direct sensing typically is used when galvanic isolation is not required, although isolated devices are available. -

Hall Sensor Output Signal Fault-Detection &Amp
MATEC Web of Conferences59, 01007 (2016) DOI: 10.1051/matecconf/2016 59 01007 ICFST 2016 Hall Sensor Output Signal Fault-Detection & Safety Implementation Logic SangHun, Lee1, HongSeuk, Oh2 1 Intelligent automotive team, Daegu Mechatronics & Materials Institute, S.Korea 22STARGROUPIND. LTD, S.Korea Abstract. Recently BLDC motors have been popular in various industrial applications and electric mobility. Recently BLDC motors have been popular in various industrial applications and electric mobility. In most brushless direct current (BLDC) motor drives, there are three hall sensors as a position reference. Low resolution hall effect sensor is popularly used to estimate the rotor position because of its good comprehensive performance such as low cost, high reliability and sufficient precision. Various possible faults may happen in a hall effect sensor. This paper presents a fault-tolerant operation method that allows the control of a BLDC motor with one faulty hall sensor and presents the hall sensor output fault-tolerant control strategy. The situations considered are when the output from a hall sensor stays continuously at low or high levels, or a short-time pulse appears on a hall sensor signal. For fault detection, identification of a faulty signal and generating a substitute signal, this method only needs the information from the hall sensors. There are a few research work on hall effect sensor failure of BLDC motor. The conventional fault diagnosis methods are signal analysis, model based analysis and knowledge based analysis. The proposed method is signal based analysis using a compensation signal for reconfiguration and therefore fault diagnosis can be fast. The proposed method is validated to execute the simulation using PSIM. -

On Eddy Currents in a Rotating Disk Ί at the Surface of the Sheet
jsf the magnetic induction Β produced by On Eddy Currents in a Rotating Disk ί at the surface of the sheet. The eddy currents are generated not only by the changes in the magnetic in- W. R. SMYTH Ε "duction B' of the external field, but also NONMEMBER AIEE by the changes of the magnetic induction -B of eddy currents elsewhere in the sheet. DEVICE which often occurs in should know its derivation which, as given One of Maxwell's equations combined A electric machines and instruments by Maxwell, is difficult for modern stu- with Ohm's law gives the induced current consists of a relatively thin conducting dents to follow. A simplified proof which to be disk rotating between the pole pieces of a brings out the points essential for our permanent magnet or electromagnet. problem is given below. VXE=Vx- = -~ {B'+B) (3) The author has received inquiries as to The object is to calculate the magnetic y àt the method of calculating the paths ol the induction Β produced by the eddy cur- Writing out the ζ component of this equa- eddy currents and the torque in such cents of density ί induced in a thin plane tion and using equation 2 give cases. The following rather simple sheet of thickness b, unit permeability and l/d% àix\ method, which is quite accurate for a conductivity y lying in the xy plane by a 1 ÎàBx àBj permanent magnet, seems not to be de- fluctuating magnetic field of induction y\àx by / 2irby\ àx ày scribed in the literature. -

A Current Sensor Based on the Giant Magnetoresistance Effect: Design and Potential Smart Grid Applications
Sensors 2012, 12, 15520-15541; doi:10.3390/s121115520 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article A Current Sensor Based on the Giant Magnetoresistance Effect: Design and Potential Smart Grid Applications Yong Ouyang 1, Jinliang He 1,*, Jun Hu 1 and Shan X. Wang 1,2 1 State Key Lab of Power Systems, Department of Electrical Engineering, Tsinghua University, Beijing 100084, China; E-Mails: [email protected] (Y.O.Y.); [email protected] (J.H.) 2 Center for Magnetic Nanotechnology, Stanford University, 450 Serra Mall, Stanford, CA 94305, USA; E-Mail: [email protected] * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +86-10-6278-8811; Fax: +86-10-6278-4709. Received: 27 September 2012; in revised form: 29 October 2012 / Accepted: 30 October 2012 / Published: 9 November 2012 Abstract: Advanced sensing and measurement techniques are key technologies to realize a smart grid. The giant magnetoresistance (GMR) effect has revolutionized the fields of data storage and magnetic measurement. In this work, a design of a GMR current sensor based on a commercial analog GMR chip for applications in a smart grid is presented and discussed. Static, dynamic and thermal properties of the sensor were characterized. The characterizations showed that in the operation range from 0 to ±5 A, the sensor had a sensitivity of 28 mV·A−1, linearity of 99.97%, maximum deviation of 2.717%, frequency response of −1.5 dB at 10 kHz current measurement, and maximum change of the amplitude response of 0.0335%·°C−1 with thermal compensation. -

High Sensitivity Differential Giant Magnetoresistance (GMR) Based Sensor for Non-Contacting DC/AC Current Measurement
Article High Sensitivity Differential Giant Magnetoresistance (GMR) Based Sensor for Non-Contacting DC/AC Current Measurement Cristian Mușuroi, Mihai Oproiu, Marius Volmer * and Ioana Firastrau 1 Department of Electrical Engineering and Applied Physics, Transilvania University of Brasov, 29 Blvd. Eroilor, 500036 Brasov, Romania; [email protected] (C.M.); [email protected] (M.O.); [email protected] (I.F.) * Correspondence: [email protected] Received: 10 December 2019; Accepted: 3 January 2020; Published: 6 January 2020 Abstract: This paper presents the design and implementation of a high sensitivity giant magnetoresistance (GMR) based current sensor with a broad range of applications. The novelty of our approach consists in using a double differential measurement system, based on commercial GMR sensors, with an adjustable biasing system used to linearize the field response of the system. The work aims to act as a fully-operational proof of concept application, with an emphasis on the mode of operation and methods to improve the sensitivity and linearity of the measurement system. The implemented system has a broad current measurement range from as low as 75 mA in DC and 150 mA in AC up to 4 A by using a single setup. The sensor system is also very low power, consuming only 6.4 mW. Due to the way the sensors are polarized and positioned above the U- shaped conductive band through which the current to be measured is flowing, the differential setup offers a sensitivity of about between 0.0272 to 0.0307 V/A (signal from sensors with no amplifications), a high immunity to external magnetic fields, low hysteresis effects of 40 mA, and a temperature drift of the offset of about −2.59×10−4 A/°C.