NASA's Exploration & Science Analogs EVA Technology
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

MRA Leadership
2 MRA Leadership President Neil Van Dyke Stowe Mountain Rescue [email protected] July 2010 MRA Member Guides NASA On Undersea Exploration Analog Vice President Mission …………………………………………………………….3 About Steve Chappell……………………………………………...4 Doug Wesson A Letter From Our New President…………………………………4 Juneau Mountain Rescue Suspension Syndrome…………………………..………………….5 [email protected] Commentary from MRA Medical Committee Chair Skeet Glatterer, M.D……………………………………………………...5 Five Colorado SAR Teams Receive Prestigious NASAR Award…6 Past President 2010 MRA Spring Conference Report……………………………..7 Charley Shimanski Book Review: Mountain Responder……………………………….8 [email protected] International Tech Rescue Symposium…………………………….8 Himalayan First: Standby Rescue Helicopters……………………..9 Don‘t Just Do Something—Stand There!.......................................10 National Search and Rescue Week Designated…………………..11 Secretary/Treasurer John Chang Cover photo by NASA. Bay Area Mountain Rescue Unit [email protected] MRA Sponsors At-Large Member Jim Frank Thanks to the corporate supporters of the MRA. Please support Santa Barbara County SAR those that generously support us! Click the logo to follow the [email protected] link! At-Large Member Dave Clarke Portland Mountain Rescue Cell: 503-784-6341 [email protected] Executive Secretary Kayley Trujillo [email protected] Corporate correspondence to: Mountain Rescue Association PO Box 880868 San Diego, CA 92168-0868 ©2010 Mountain Rescue Association All rights reserved. All content ©MRA or as otherwise noted. Permission to reprint granted to MRA units in good standing with the MRA. 3 MRA Member Guides NASA On Undersea Exploration Analog Mission Parts reprinted with permission from NASA From May 10 - 24, 2010, two astronauts, a veteran undersea engineer and an experienced scientist embarked on the 14th NASA Extreme Environment Mission Operations (NEEMO) undersea analog mission at the Aquarius undersea labora- tory. -
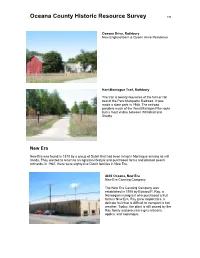
West Michigan Pike Route but Is Most Visible Between Whitehall and Shelby
Oceana County Historic Resource Survey 198 Oceana Drive, Rothbury New England Barn & Queen Anne Residence Hart-Montague Trail, Rothbury The trail is twenty-two miles of the former rail bed of the Pere Marquette Railroad. It was made a state park in 1988. The railroad parallels much of the West Michigan Pike route but is most visible between Whitehall and Shelby. New Era New Era was found in 1878 by a group of Dutch that had been living in Montague serving as mill hands. They wanted to return to an agrarian lifestyle and purchased farms and planted peach orchards. In 1947, there were eighty-five Dutch families in New Era. 4856 Oceana, New Era New Era Canning Company The New Era Canning Company was established in 1910 by Edward P. Ray, a Norwegian immigrant who purchased a fruit farm in New Era. Ray grew raspberries, a delicate fruit that is difficult to transport in hot weather. Today, the plant is still owned by the Ray family and processes green beans, apples, and asparagus. Oceana County Historic Resource Survey 199 4775 First Street, New Era New Era Reformed Church 4736 First Street, New Era Veltman Hardware Store Concrete Block Buildings. New Era is characterized by a number of vernacular concrete block buildings. Prior to 1900, concrete was not a common building material for residential or commercial structures. Experimentation, testing and the development of standards for cement and additives in the late 19th century, led to the use of concrete a strong reliable building material after the turn of the century. Concrete was also considered to be fireproof, an important consideration as many communities suffered devastating fires that burned blocks of their wooden buildings Oceana County Historic Resource Survey 200 in the late nineteenth century. -

27 Th Space Radiation Investigators' Workshop (2016)
National Aeronautics and Space Administration 2016 HUMAN RESEARCH PROGRAM Investigators’ Workshop Frontiers in Human Space Exploration Research February 8-11, 2016 Galveston Island Convention Center Galveston, TX NASA Human Research Program Investigators’ Workshop Frontiers in Human Space Exploration Research February 8-11, 2016 Galveston Island Convention Center Galveston, TX In conjunction with the Space Radiation Investigators’ Workshop And the 2016 HRP 10th Anniversary Banquet February 10, 2016 Sponsors NASA Human Research Program National Space Biomedical Research Institute Steering Committee Maneesh Arya, Ph.D. Michele Perchonok, Ph.D. Yael Barr, M.D. Clarence Sams, Ph.D. John Charles, Ph.D. Graham Scott, Ph.D. Barbara Corbin Ronak Shah, D.O. Janice Huff, Ph.D. Mark Shelhamer, Sc.D. Lauren Leveton, Ph.D. Lisa Simonsen, Ph.D. Peter Norsk, M.D. Mihriban Whitmore, Ph.D. William Paloski, Ph.D. Conference logistics, administration, technical and publications support provided by All Points, LLC. 2016 NASA Human Research Program Investigators’ Workshop February 8-11, 2016 │ Galveston Island Convention Center │ 5600 Seawall Boulevard │ Galveston, TX, 77554 1 NASA Human Research Program Investigators’ Workshop Frontiers in Human Space Exploration Research In conjunction with Space Radiation Investigators’ Workshop Monday, February 8 General Session (8:00 a.m. – 11:35 a.m.) 7:30 a.m. Pre-function (1st floor) General Registration/Check-in 8:00 a.m. Grand Ballroom Greetings from the International Space Station – S Kelly 8:05 a.m. Welcome – M Shelhamer 8:15 a.m. Human Research Program Introductory Remarks – W Paloski and B Corbin 8:25 a.m. National Space Biomedical Research Institute (NSBRI) Introductory Remarks – J Sutton 8:30 a.m. -
HHP Annual Report
ealth & Huma Performance Annual Report 2004 - 2005 Academic Year University of Houston Colle g e of E ducat ion COLLAABOOR TI N FOR LLEA RNIN G & EADING The Department of Health and Human Performance College of Education – University of Houston The 2004-2005 Academic Year was another great year for the Department of Health and Human Performance (HHP). Building upon the successes of the previous years, the department continued to make significant forward strides in the area of research, academics, and service. This progress was reflected in 41 peer reviewed research articles, 57 scientific presentations, curriculum revisions, personnel increases, and continued improvement in the quality of graduate students. Additionally, the department received $1,059,263.00 in new funding to support research and other projects. This is the greatest amount of funding ever generated by the department. Improvements to the Garrison-Melcher Complex The improvements to the Garrison-Melcher complex continued throughout the year. The upgrades to the classrooms were completed just in time for the start of the academic year. The once drab classrooms are now full of color and modern teaching technology. The new classrooms in what was once the old Garrison student locker room also come “online” during the fall semester. The 2nd floor hallway of Melcher Gymnasium was completely renovated with the addition of color, modern materials and several display cases. Working with several campus offices, an agreement was formulated that will enable the development of the older Garrison showers into first class “project” space. This agreement also includes the future refurbishing of the stairwells and the development of a student lounge. -

International Space Medicine Summit III Executive Summary
INTERNATIONAL SPACE MEDICINE SUMMIT III EXECUTIVE SUMMARY JAMES A. BAKER III INSTITUTE FOR PUBLIC POLICY RICE UNIVERSITY INTERNATIONAL SPACE MEDICINE SUMMIT III May 14–17, 2009 EXECUTIVE SUMMARY FEBRUARY 2010 International Space Medicine Summit III THIS SUMMARY WAS WRITTEN BY PARTICIPANTS OF A JOINT CONFERENCE ORGANIZED BY THE JAMES A. BAKER III INSTITUTE FOR PUBLIC POLICY AND BAYLOR COLLEGE OF MEDICINE. THE VIEWS EXPRESSED IN THIS SUMMARY ARE THOSE OF THE INDIVIDUAL PARTICIPANT(S) AND DO NOT NECESSARILY REPRESENT THE VIEWS OF THE JAMES A. BAKER III INSTITUTE FOR PUBLIC POLICY OR BAYLOR COLLEGE OF MEDICINE. © 2010 BY THE JAMES A. BAKER III INSTITUTE FOR PUBLIC POLICY OF RICE UNIVERSITY THIS MATERIAL MAY BE QUOTED OR REPRODUCED WITHOUT PRIOR PERMISSION, PROVIDED APPROPRIATE CREDIT IS GIVEN TO THE JAMES A. BAKER III INSTITUTE FOR PUBLIC POLICY. 2 International Space Medicine Summit III Organizing Partners James A. Baker III Institute for Public Policy, Rice University The mission of the Baker Institute is to help bridge the gap between the theory and practice of public policy by drawing together experts from academia, government, media, business, and nongovernmental organizations. By involving policymakers and scholars, as well as students (tomorrow’s policymakers and scholars), the institute seeks to improve the debate on selected public policy issues and to make a difference in the formulation, implementation, and evaluation of public policy, both domestic and international. The Baker Institute is an integral part of Rice University, one of the nation’s most distinguished institutions of higher education. The efforts of Baker Institute fellows and affiliated Rice faculty focus on several ongoing research projects, details of which can be found on the institute’s Web site, http://bakerinstitute.org. -

Memorials of Angus and Mearns, an Account, Historical, Antiquarian, and Traditionary
j m I tm &Cfi mm In^fl^fSm MEMORIALS OF ANGUS AND THE MEARNS AN ACCOUNT HISTORICAL, ANTIQUARIAN, AND TRADITIONARY, OF THE CASTLES AND TOWNS VISITED BY EDWARD L, AND OF THE BARONS, CLERGY, AND OTHERS WHO SWORE FEALTY TO ENGLAND IN 1291-6 ; ALSO OF THE ABBEY OF CUPAR AND THE PRIORY OF RESTENNETH, By the late ANDREW JERVISE, F.SA. SCOT. " DISTRICT EXAMINER OF REGISTERS ; AUTHOR OF THE LAND OF THE LINDSAYS," "EPITAPHS AND INSCRIPTIONS," ETC. REWRITTEN AND CORRECTED BY Rev. JAMES GAMMACK, M.A. Aberdeen CORRESPONDING MEMBER OF THE SOCIETY OF ANTIQUARIES, SCOTLAND ; AND MEMBER OF THE CAMBRIAN ARCH/EOLOGICAL ASSOCIATION. *v MEMORIALS OF ANGUS and M EARNS AN ACCOUNT HISTORICAL, ANTIQUARIAN, S* TRADITIONARY. VOL. I. EDINBURGH: DAVID DOUGLAS M DCCC LXXXV TO THE EIGHT HONOURABLE 31ame& SIXTH, AND BUT FOR THE ATTAINDER NINTH, EAEL OF SOUTHESK, BARON CARNEGIE OF KINNAIRD AND LEUCHARS, SIXTH BARONET OF PITTARROW, FIRST BARON BALINHARD OF FARNELL, AND A KNIGHT OF THE MOST ANCIENT AND MOST NOBLE ORDER OF THE THISTLE, Sins Seconn tuition IN IS, ACKNOWLEDGMENT OF MANY FAVOURS, MOST RESPECTFULLY DEDICATED, BY THE EDITOR VOL. I. EDITORS PBEFACE TO THE SECOND EDITION. As the Eirst Edition of this work was evidently an object of much satisfaction to the Author, and as its authority has been recognised by its being used so freely by later writers, I have felt in preparing this Second Edition that I was acting under a weighty responsibility both to the public and to Mr. Jervise's memory. Many fields have presented themselves for independent research, but as the plan of the work and its limits belonged to the author and not to the editor, I did not feel justified in materially altering either of them. -
X-RAY Magazine :: Issue 26 :: October
GirlDiver: Girls On Speed—Scooter Dive British Columbia Thetis Island 330m Deep GLOBAL EDITION Pascal October 2008 Number 26 Bernabé India Bangaram Island Portfolio Stéphane Braud DOMINICA • ST LUCIA • ST VINCENT Night Photography Caribbean Islands Kurt Amsler 1 X-RAY MAG : 26 : 2008 COVER PHOTO BY KURT AMSLER 2 X-RAY MAG : 26 : 2008 DIRECTORY X-RAY MAG is published by AquaScope Media ApS Join Kurt Amsler’s efforts to save Indonesia’s endangered sea turtles Frederiksberg, Denmark Sign the petition & donate to the cause at: www.sos-seaturtles.ch www.xray-mag.com PUBLISHER SENIOR EDITOR Diver inspects reef coral and sponges, Dominica, Caribbean. Photo by Steve Jones & EDITOR-IN-CHIEF Michael Symes Peter Symes [email protected] [email protected] SECTION EDITORS contents PUBLISHER / EDITOR Andrey Bizyukin, PhD - Features & CREATIVE DIRECTOR Arnold Weisz - News, Features Gunild Symes Catherine Lim - News, Books [email protected] Simon Kong - News, Books Mathias Carvalho - Wrecks ASSOCIATE EDITORS Cindy Ross - GirlDiver & REPRESENTATIVES: Cedric Verdier - Tech Talk Americas: Scott Bennett - Photography Arnold Weisz Scott Bennett - Travel [email protected] Fiona Ayerst - Sharks Michael Arvedlund, PhD Russia Editors & Reps: - Ecology Andrey Bizyukin PhD, Moscow [email protected] CORRESPONDENTS Robert Aston - CA, USA Svetlana Murashkina PhD, Moscow Enrico Cappeletti - Italy [email protected] John Collins - Ireland Marcelo Mammana - Argentina South East Asia Editor & Rep: Nonoy Tan - The Philippines Catherine GS Lim, Singapore [email protected] -

Probabilistic Assessment of Hypobaric Decompression Sickness Treatment Success
Probabilistic Assessment of Hypobaric Decompression Sickness Treatment Success HRP Master Task List ID# 866, Funding Period: 03/29/13 – 03/31/15 Johnny Conkin, Ph.D., Andrew FJ. Abercromby, Ph.D., Joseph P. Dervay, MD, Alan H. Feiveson, Ph.D., Michael L. Gernhardt, Ph.D., Jason R. Norcross, MS, Robert Ploutz-Snyder, Ph.D., James H. Wessel, III, MS. Universities Space Research Association 3600 Bay Area Boulevard Houston, TX 77058-2769 [email protected] 281-244-1121 office 281-483-3058 fax Wyle Science, Technology & Engineering Group 1290 Hercules Ave. Houston, TX 77058 [email protected] 281-532-5091 NASA Johnson Space Center Mail Code SD2 2100 NASA Parkway Houston, TX 77058 [email protected] 281-483-7302 NASA Johnson Space Center Mail Code SK311 2100 NASA Parkway Houston, TX 77058 [email protected] 281-483-6603 NASA Johnson Space Center Mail Code EA321 2100 NASA Parkway Houston, TX 77058 [email protected] 281-244-8977 1 Wyle Science, Technology & Engineering Group 1290 Hercules Ave. Houston, TX 77058 [email protected] 281-483-7114 Universities Space Research Association 3600 Bay Area Boulevard Houston, TX 77058-2769 [email protected] 281-483-6296 Wyle Science, Technology & Engineering Group 1290 Hercules Ave. Houston, TX 77058 [email protected] 281-244-1128 2 Abstract The Hypobaric Decompression Sickness (DCS) Treatment Model links a decrease in computed bubble volume from increased pressure (P), increased oxygen (O2) partial pressure, and passage of time during treatment to the probability of symptom resolution [P(symptom resolution)]. -

L'homme Sous La Mer Juin 2010 Définitif
L’Homme sous la Mer Du vendredi 4 au dimanche 27 juin 2010 Espace Saint-Nazaire, Théâtre Galli, Baie de Sanary Sommaire Communiqué 2 Temps forts de « l’Homme sous la mer » 3 Vendredi 4 juin 4 Samedi 5 juin, conférence animée par Gérard Carrodano 5 Vendredi 11 juin, cérémonie du 100 ème anniversaire de la naissance du C. Cousteau 6/7 Samedi 12 et dimanche 13 juin, conférences animée par les anciens de la « Calypso » 8 Vendredi 18 juin, conférence animée par René Heuzey 9 Samedi 26 juin, conférence animée par Gaby Di Domenico 10 Exposition municipale - Présentation du Musée Frédéric Dumas 11 Exposition municipale - Présentation de l’association Immersio 12 L’homme sous la mer 13 Historique de la plongée 14/22 Histoire de la plongée à Sanary 23 Sanary et les « Mousquemers » 24 Habiter sous la mer 25 Travailler sous la mer 26 Préserver, sauvegarder 27 Service Communication 04 94 32 97 37 [email protected] www.sanrysurmer.com L’Homme sous la Mer Du vendredi 4 au dimanche 27 juin 2010 Espace Saint-Nazaire, Théâtre Galli, Baie de Sanary Communiqué Cité historique de la plongée sous marine, la ville de Sanary-sur-Mer vous offre un voyage dans l’histoire de la plongée et la mise en perspective de Sanary dans cette aventure, en collaboration avec les associations « Musée Frédéric Dumas », « Immersio », le Festival Mondial de l’Image Sous-marine et « Submareum ». « l’Homme sous la mer », du vendredi 4 au dimanche 27 juin 2010 , Espace Saint Nazaire , Théâtre Galli, baie de Sanary Inauguration : vendredi 4 juin – 18h30 : Espace Saint-Nazaire et 21h : Théâtre Galli Sanary-sur-Mer occupe une place exceptionnelle dans l’histoire de la plongée, elle-même indissociable de l’aventure des « Mousquemers », Frédéric Dumas, Philippe Tailliez, et Jacques Yves Cousteau. -
126613907.23.Pdf
$cs. 2% PUBLICATIONS OF THE SCOTTISH HISTORY SOCIETY VOLUME XXVIII WEDDERBURNE’S COMPT BUIK May 1898 THE COMPT BUIK OF DAVID WEDDEKBURNE MERCHANT OF DUNDEE 1587-1630 TOGETHER WITH THE SHIPPING LISTS OF DUNDEE 1580-1618 Edited from the Original Manuscripts, with Introduction and Notes, by A. H. MILLAR, F.S.A.Scot. EDINBURGH • T £) 0: L£ Printed at the University Press by T. and A. Constable x ou T for the Scottish History Society 1898 PREFATORY NOTE The manuscript Compt Bulk of David Wedderburne belonged to the late Mr. A. C. Lamb, Dundee, and a few of the historical entries were used in Mr. Lamb’s volume, entitled Dundee: its Quaint and Historic Buildings. The editor assisted Mr. Lamb in the preparation of the literary portion of that volume, and it occurred to him that the Compt Buik would afford precisely the kind of material suitable for a volume such as the Scottish History Society would publish. On making the suggestion to Mr. Lamb, he at once adopted it, and placed the manuscript at the disposal of the Society. He gave free access to his extensive collection of documents relating to the history of Dundee, and rendered valuable assistance in other ways. As the Editor had made voluminous notes in the charter- room of Dundee when engaged upon his Boll of Eminent Burgesses of Dundee, 1513-1887, he was able to utilise these in identifying many of the persons mentioned in the Compt Buik. He has specially to acknowledge the courtesy of Alexander Wedderburn, Esq., Q.C., London, who kindly pro- vided the material for the account of the Wedderburn Family, which forms a separate portion of the Introduction. -

Human System Laboratory Publications
HUMAN SYSTEM LABORATORY PUBLICATIONS January 2020 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Aeronautics and Astronautics Human Systems Laboratory 70 Vassar Street, Room 37-219 Cambridge, Massachusetts 02139 NOTES Publications are listed in reverse chronological order, and include journal articles, abstracts, and technical reports. MVL student theses are indexed in a separate list, "Man-Vehicle Laboratory Theses," which is available upon request. Copies of all publications are available in limited numbers upon request. When requesting publications, give the MVL publication number listed with each citation. Numbers are assigned when author makes publication available for distribution, usually when it is accepted for publication or is in press. Some publication numbers are missing from sequence because the manuscripts originally assigned to them were reassigned to the year of actual publication in the open literature. Page 1 2020 Clark, Torin, Young, Laurence R., “A gravity-dose response: Human spatial orientation perception in hypo-gravity” Abstract, 2020 Next-generation Suborbital Researchers Conference (NSRC), Broomfield, Colorado, March 2-4, 2020. 2019 Dixon, Philippe, Leia Stirling, Xu Xu, Chien-Chi Chang, Jack Dennerlein, and Jeff Schiffman. "Aging may negatively impact movement smoothness during stair negotiation." Human Movement Science (In Press). Stirling, Leia, Ho Chit Siu, Eric Jones, and Kevin Duda. "Human Factors Considerations for Enabling Functional Use of Exosystems in Operational Environments." IEEE Systems Journal (In Press). Gibson, Alison, Andrea Webb, and Leia Stirling. "Evaluation of a Visual-Tactile Multimodal Display for Surface Obstacle Avoidance During Walking." IEEE Transactions on Human-Machine Systems (In Press). Diaz, Ana, Heldt, Thomas, Young, Laurence R., “Computational Model of Cardiovascular Response to Centrifugation and Lower- body Cycling Exercise”, J Appl Physiol (1985). -

I Februar I Février I Febbraio I 2012 1 Inhalt | Sommaire | Sommario Nereus 5 | 2012
cmYK – positive anwendung – rot m 100 – Y 100 / Blau c 100 m 80 cmYKnereus – negative anwendung – rot m 100 – 100 / Blau c 100 m 80 DIE OFFIZIELLE ZEITSCHRIFT DES SUSV – LE MAGAZINE OFFICIEL DE LA FSSS – LA RIVISTA UFFICIALE DELLA FSSS inside . mb microtec I Pterois volitans: Eine Plage I Tauchkurs – Abenteuer für Kinder Mission SeaOrbiter – Création Jacques Rougerie I TigerBeach I Horizon III Bali – Menjangan/Secret Bay I Osservazioni di uno straniero in Val Verzasca www.susv.ch I www.fsss.ch Februar I Février I Febbraio I 2012 1 InHalt | SommaIre | SommarIo nereuS 5 | 2012 4 Offre pour les membres FSSS 5 Editorial SUSV – FSSS & News AUSTARIERT! 11 «Acquisition de membres 2012» 12 A vendre . Faszinierende Tauchreisen 13 Copa da Natal – nage avec palme 18 Freediving 2012 im Roten Meer. Tauchkreuzfahrt 20 Délai rédactionnel RotesRote Meer: Titelbild | Couverture | Copertina: s Michel Lonfat | www.michel-lonfat.ch M/Y BlBlue Waves 21 Portfolio Oliver Notz u Waves 26 Mission SeaOrbiter – Création Jacques Rougerie 24.5.–31.5.12 und 25.10.–1.11.12 38 TigerBeach un 5.10.–1.11.12 1 Woche für CHF 42 Horizon III – Une semaine de rêve 2090.fü CHF* statt CHF 2325.– - 25. Februar Ittigen-Bern Delegiertenversammlung 2012 25 février Ittigen-Berne 4 Mitgliederangebot Assemblée des délégués 2012 5 Editorial 25 febbraio 6 Boot 2012 Ittigen-Berna Assemblea dei delegati• fsss.ch 2012 SUSV – FSSS & News Info: susv.ch 11 Mitgliederwerbung 12 Vortragsabend: Wie funktioniert der See? Tauchplatz Gipsunion, Thunersee 13 Ferienmesse St. Gallen 2012 14 Indoor-Weltmeisterschaft im Apnoetauchen 2011 16 Knotenkunde leicht gemacht 17 5.