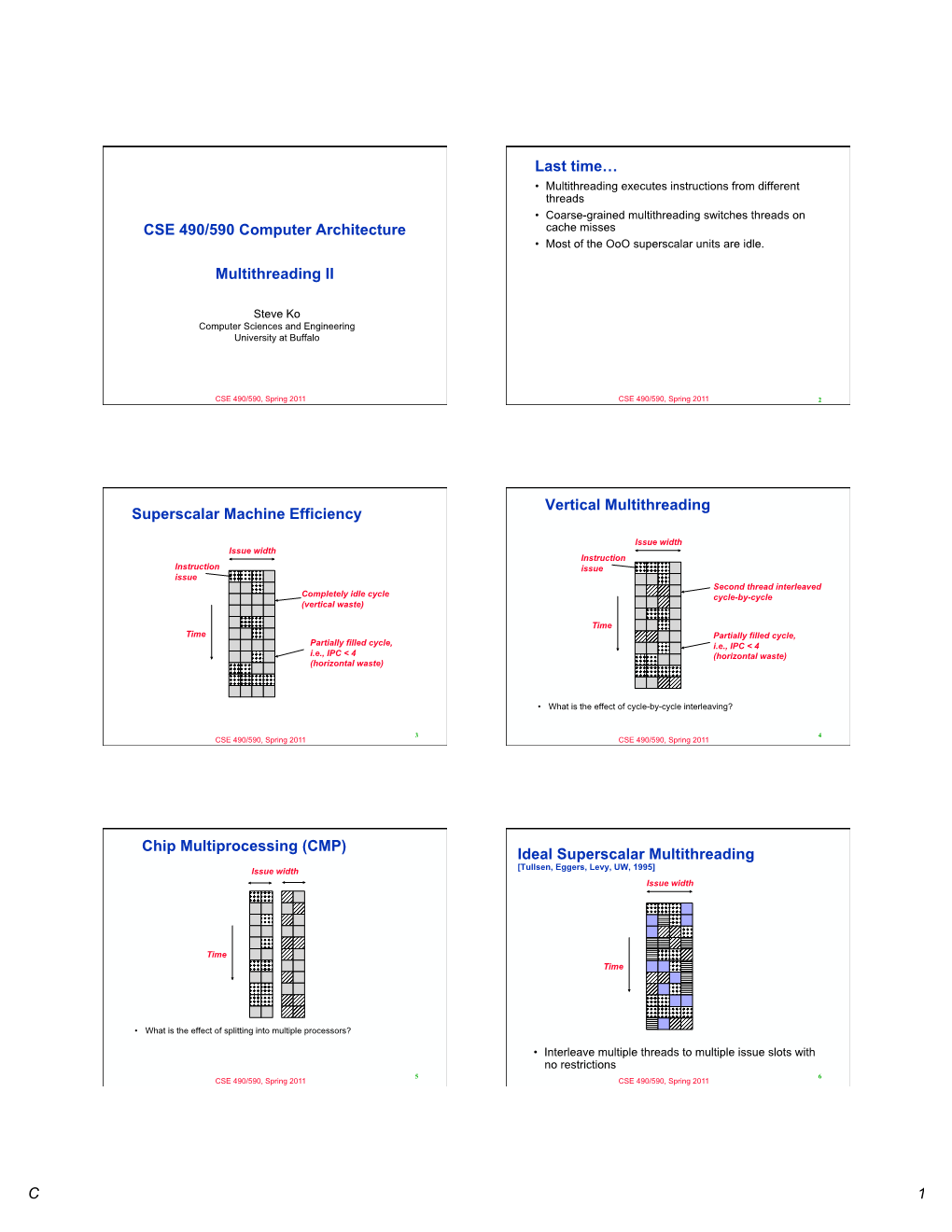
CSE 490/590 Computer Architecture Multithreading II Last Time…
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Data-Flow Prescheduling for Large Instruction Windows in Out-Of-Order Processors
Data-Flow Prescheduling for Large Instruction Windows in Out-of-Order Processors Pierre Michaud, Andr´e Seznec IRISA/INRIA Campus de Beaulieu, 35042 Rennes Cedex, France {pmichaud, seznec}@irisa.fr Abstract We introduce data-flow prescheduling. Instructions are sent to the issue buffer in a predicted data-flow order instead The performance of out-of-order processors increases of the sequential order, allowing a smaller issue buffer. The with the instruction window size. In conventional proces- rationale of this proposal is to avoid using entries in the is- sors, the effective instruction window cannot be larger than sue buffer for instructions which operands are known to be the issue buffer. Determining which instructions from the yet unavailable. issue buffer can be launched to the execution units is a time- In our proposal, this reordering of instructions is accom- critical operation which complexity increases with the issue plished through an array of schedule lines. Each schedule buffer size. We propose to relieve the issue stage by reorder- line corresponds to a different depth in the data-flow graph. ing instructions before they enter the issue buffer. This study The depth of each instruction in the data-flow graph is de- introduces the general principle of data-flow prescheduling. termined, and the instruction is inserted in the correspond- Then we describe a possible implementation. Our prelim- ing schedule line. Lines are consumed by the issue buffer inary results show that data-flow prescheduling makes it sequentially. possible to enlarge the effective instruction window while Section 2 briefly describes issue buffers and discusses re- keeping the issue buffer small. -

GPU Implementation Over IPTV Software Defined Networking
Esmeralda Hysenbelliu. Int. Journal of Engineering Research and Application www.ijera.com ISSN : 2248-9622, Vol. 7, Issue 8, ( Part -1) August 2017, pp.41-45 RESEARCH ARTICLE OPEN ACCESS GPU Implementation over IPTV Software Defined Networking Esmeralda Hysenbelliu* Information Technology Faculty, Polytechnic University of Tirana, Sheshi “Nënë Tereza”, Nr.4, Tirana, Albania Corresponding author: Esmeralda Hysenbelliu ABSTRACT One of the most important issue in IPTV Software defined Network is Bandwidth Issue and Quality of Service at the client side. Decidedly, it is required high level quality of images in low bandwidth and for this reason it is needed different transcoding standards (Compression of image as much as it is possible without destroying the quality of it) as H.264, H265, VP8 and VP9. During a test performed in SMC IPTV SDN Cloud Network, it was observed that with a server HP ProLiant DL380 g6 with two physical processors there was not possible to transcode in format H.264 more than 30 channels simultaneously because CPU’s achieved 100%. This is the reason why it was immediately needed to use Graphic Processing Units called GPU’s which offer high level images processing. After GPU superscalar processor was integrated and done functional via module NVENC of FFEMPEG Program, number of channels transcoded simultaneously was tremendous increased (more than 100 channels). The aim of this paper is to real implement GPU superscalar processors in IPTV Cloud Networks by achieving improvement of performance to more than 60%. Keywords - GPU superscalar processor, Performance Improvement, NVENC, CUDA --------------------------------------------------------------------------------------------------------------------------------------- Date of Submission: 01 -05-2017 Date of acceptance: 19-08-2017 --------------------------------------------------------------------------------------------------------------------------------------- I. -

Jetson TX2 • NVIDIA Jetson Xavier • GPU Programming • Algorithm Mapping: • Convolutions Parallel Algorithm Execution
GPU and multicore CPU architectures. Algorithm mapping Contributors: N. Tsapanos, I. Karakostas, I. Pitas Aristotle University of Thessaloniki, Greece Presenter: Prof. Ioannis Pitas Aristotle University of Thessaloniki [email protected] www.multidrone.eu Presentation version 1.3 GPU and multicore CPU architectures. Algorithm mapping • GPU and multicore CPU processing boards • Graphics cards • NVIDIA Jetson TX2 • NVIDIA Jetson Xavier • GPU programming • Algorithm mapping: • Convolutions Parallel algorithm execution • Graphics computing: • Highly parallelizable • Linear algebra parallelization: • Vector inner products: 푐 = 풙푇풚. • Matrix-vector multiplications 풚 = 푨풙. • Matrix multiplications: 푪 = 푨푩. Parallel algorithm execution • Convolution: 풚 = 푨풙 • CNN architectures, linear systems, signal filtering. • Correlation: 풚 = 푨풙 • template matching, tracking. • Signal transforms (DFT, DCT, Haar, etc): • Matrix vector product form: 푿 = 푾풙 • 2D transforms (matrix product form): 푿’ = 푾푿. Processing Units • Multicore (CPU): • MIMD. • Focused on latency. • Best single thread performance. • Manycore (GPU): • SIMD. • Focused on throughput. • Best for embarrassingly parallel tasks. Pascal microarchitecture https://devblogs.nvidia.com/inside-pascal/gp100_block_diagram-2/ Pascal microarchitecture https://devblogs.nvidia.com/inside-pascal/gp100_sm_diagram/ GeForce GTX 1080 • Microarchitecture: Pascal. • DRAM: 8 GB GDDR5X at 10000 MHz. • SMs: 20. • Memory bandwidth: 320 GB/s. • CUDA cores: 2560. • L2 Cache: 2048 KB. • Clock (base/boost): 1607/1733 MHz. • L1 Cache: 48 KB per SM. • GFLOPs: 8873. • Shared memory: 96 KB per SM. GPU and multicore CPU architectures. Algorithm mapping • GPU and multicore CPU processing boards • Graphics cards • NVIDIA Jetson TX2 • NVIDIA Jetson Xavier • GPU programming • Algorithm mapping: • Convolutions ARM Cortex-A57: High-End ARMv8 CPU • ARMv8 architecture • Architecture evolution that extends ARM’s applicability to all markets. • Full ARM 32-bit compatibility, streamlined 64-bit capability. -

Computer Hardware Architecture Lecture 4
Computer Hardware Architecture Lecture 4 Manfred Liebmann Technische Universit¨atM¨unchen Chair of Optimal Control Center for Mathematical Sciences, M17 [email protected] November 10, 2015 Manfred Liebmann November 10, 2015 Reading List • Pacheco - An Introduction to Parallel Programming (Chapter 1 - 2) { Introduction to computer hardware architecture from the parallel programming angle • Hennessy-Patterson - Computer Architecture - A Quantitative Approach { Reference book for computer hardware architecture All books are available on the Moodle platform! Computer Hardware Architecture 1 Manfred Liebmann November 10, 2015 UMA Architecture Figure 1: A uniform memory access (UMA) multicore system Access times to main memory is the same for all cores in the system! Computer Hardware Architecture 2 Manfred Liebmann November 10, 2015 NUMA Architecture Figure 2: A nonuniform memory access (UMA) multicore system Access times to main memory differs form core to core depending on the proximity of the main memory. This architecture is often used in dual and quad socket servers, due to improved memory bandwidth. Computer Hardware Architecture 3 Manfred Liebmann November 10, 2015 Cache Coherence Figure 3: A shared memory system with two cores and two caches What happens if the same data element z1 is manipulated in two different caches? The hardware enforces cache coherence, i.e. consistency between the caches. Expensive! Computer Hardware Architecture 4 Manfred Liebmann November 10, 2015 False Sharing The cache coherence protocol works on the granularity of a cache line. If two threads manipulate different element within a single cache line, the cache coherency protocol is activated to ensure consistency, even if every thread is only manipulating its own data. -

Superscalar Fall 2020
CS232 Superscalar Fall 2020 Superscalar What is superscalar - A superscalar processor has more than one set of functional units and executes multiple independent instructions during a clock cycle by simultaneously dispatching multiple instructions to different functional units in the processor. - You can think of a superscalar processor as there are more than one washer, dryer, and person who can fold. So, it allows more throughput. - The order of instruction execution is usually assisted by the compiler. The hardware and the compiler assure that parallel execution does not violate the intent of the program. - Example: • Ordinary pipeline: four stages (Fetch, Decode, Execute, Write back), one clock cycle per stage. Executing 6 instructions take 9 clock cycles. I0: F D E W I1: F D E W I2: F D E W I3: F D E W I4: F D E W I5: F D E W cc: 1 2 3 4 5 6 7 8 9 • 2-degree superscalar: attempts to process 2 instructions simultaneously. Executing 6 instructions take 6 clock cycles. I0: F D E W I1: F D E W I2: F D E W I3: F D E W I4: F D E W I5: F D E W cc: 1 2 3 4 5 6 Limitations of Superscalar - The above example assumes that the instructions are independent of each other. So, it’s easily to push them into the pipeline and superscalar. However, instructions are usually relevant to each other. Just like the hazards in pipeline, superscalar has limitations too. - There are several fundamental limitations the system must cope, which are true data dependency, procedural dependency, resource conflict, output dependency, and anti- dependency. -

The Multiscalar Architecture
THE MULTISCALAR ARCHITECTURE by MANOJ FRANKLIN A thesis submitted in partial ful®llment of the requirements for the degree of DOCTOR OF PHILOSOPHY (Computer Sciences) at the UNIVERSITY OF WISCONSIN Ð MADISON 1993 THE MULTISCALAR ARCHITECTURE Manoj Franklin Under the supervision of Associate Professor Gurindar S. Sohi at the University of Wisconsin-Madison ABSTRACT The centerpiece of this thesis is a new processing paradigm for exploiting instruction level parallelism. This paradigm, called the multiscalar paradigm, splits the program into many smaller tasks, and exploits ®ne-grain parallelism by executing multiple, possibly (control and/or data) depen- dent tasks in parallel using multiple processing elements. Splitting the instruction stream at statically determined boundaries allows the compiler to pass substantial information about the tasks to the hardware. The processing paradigm can be viewed as extensions of the superscalar and multiprocess- ing paradigms, and shares a number of properties of the sequential processing model and the data¯ow processing model. The multiscalar paradigm is easily realizable, and we describe an implementation of the multis- calar paradigm, called the multiscalar processor. The central idea here is to connect multiple sequen- tial processors, in a decoupled and decentralized manner, to achieve overall multiple issue. The mul- tiscalar processor supports speculative execution, allows arbitrary dynamic code motion (facilitated by an ef®cient hardware memory disambiguation mechanism), exploits communication localities, and does all of these with hardware that is fairly straightforward to build. Other desirable aspects of the implementation include decentralization of the critical resources, absence of wide associative searches, and absence of wide interconnection/data paths. -

Computer Architecture Out-Of-Order Execution
Computer Architecture Out-of-order Execution By Yoav Etsion With acknowledgement to Dan Tsafrir, Avi Mendelson, Lihu Rappoport, and Adi Yoaz 1 Computer Architecture 2013– Out-of-Order Execution The need for speed: Superscalar • Remember our goal: minimize CPU Time CPU Time = duration of clock cycle × CPI × IC • So far we have learned that in order to Minimize clock cycle ⇒ add more pipe stages Minimize CPI ⇒ utilize pipeline Minimize IC ⇒ change/improve the architecture • Why not make the pipeline deeper and deeper? Beyond some point, adding more pipe stages doesn’t help, because Control/data hazards increase, and become costlier • (Recall that in a pipelined CPU, CPI=1 only w/o hazards) • So what can we do next? Reduce the CPI by utilizing ILP (instruction level parallelism) We will need to duplicate HW for this purpose… 2 Computer Architecture 2013– Out-of-Order Execution A simple superscalar CPU • Duplicates the pipeline to accommodate ILP (IPC > 1) ILP=instruction-level parallelism • Note that duplicating HW in just one pipe stage doesn’t help e.g., when having 2 ALUs, the bottleneck moves to other stages IF ID EXE MEM WB • Conclusion: Getting IPC > 1 requires to fetch/decode/exe/retire >1 instruction per clock: IF ID EXE MEM WB 3 Computer Architecture 2013– Out-of-Order Execution Example: Pentium Processor • Pentium fetches & decodes 2 instructions per cycle • Before register file read, decide on pairing Can the two instructions be executed in parallel? (yes/no) u-pipe IF ID v-pipe • Pairing decision is based… On data -
CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 1 Datapath of Ooo Execution Processor
Fiscal Year 2020 Ver. 2021-01-25a Course number: CSC.T433 School of Computing, Graduate major in Computer Science Advanced Computer Architecture 10. Multi-Processor: Distributed Memory and Shared Memory Architecture www.arch.cs.titech.ac.jp/lecture/ACA/ Room No.W936 Kenji Kise, Department of Computer Science Mon 14:20-16:00, Thr 14:20-16:00 kise _at_ c.titech.ac.jp CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 1 Datapath of OoO execution processor Instruction flow Instruction cache Branch handler Instruction fetch Instruction decode Renaming Register file Dispatch Integer Floating-point Memory Memory dataflow RS Instruction window ALU ALU Branch FP ALU Adr gen. Adr gen. Store Reorder buffer (ROB) queue Data cache Register dataflow CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH Reservation station (RS) 2 Growth in clock rate of microprocessors From CAQA 5th edition CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 3 From multi-core era to many-core era Single-ISA Heterogeneous Multi-Core Architectures: The Potential for Processor Power Reduction, MICRO-36 CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 4 Aside: What is a window? • A window is a space in the wall of a building or in the side of a vehicle, which has glass in it so that light can come in and you can see out. (Collins) Instruction window 8 6 5 4 7 (a) Instruction window Instructions to be executed for an application Large instruction -

Trends in Processor Architecture
A. González Trends in Processor Architecture Trends in Processor Architecture Antonio González Universitat Politècnica de Catalunya, Barcelona, Spain 1. Past Trends Processors have undergone a tremendous evolution throughout their history. A key milestone in this evolution was the introduction of the microprocessor, term that refers to a processor that is implemented in a single chip. The first microprocessor was introduced by Intel under the name of Intel 4004 in 1971. It contained about 2,300 transistors, was clocked at 740 KHz and delivered 92,000 instructions per second while dissipating around 0.5 watts. Since then, practically every year we have witnessed the launch of a new microprocessor, delivering significant performance improvements over previous ones. Some studies have estimated this growth to be exponential, in the order of about 50% per year, which results in a cumulative growth of over three orders of magnitude in a time span of two decades [12]. These improvements have been fueled by advances in the manufacturing process and innovations in processor architecture. According to several studies [4][6], both aspects contributed in a similar amount to the global gains. The manufacturing process technology has tried to follow the scaling recipe laid down by Robert N. Dennard in the early 1970s [7]. The basics of this technology scaling consists of reducing transistor dimensions by a factor of 30% every generation (typically 2 years) while keeping electric fields constant. The 30% scaling in the dimensions results in doubling the transistor density (doubling transistor density every two years was predicted in 1975 by Gordon Moore and is normally referred to as Moore’s Law [21][22]). -

Intro Evolution of Superscalar Processor
Superscalar Processors Superscalar Processors vs. VLIW • 7.1 Introduction • 7.2 Parallel decoding • 7.3 Superscalar instruction issue • 7.4 Shelving • 7.5 Register renaming • 7.6 Parallel execution • 7.7 Preserving the sequential consistency of instruction execution • 7.8 Preserving the sequential consistency of exception processing • 7.9 Implementation of superscalar CISC processors using a superscalar RISC core • 7.10 Case studies of superscalar processors TECH Computer Science CH01 Superscalar Processor: Intro Emergence and spread of superscalar processors • Parallel Issue • Parallel Execution • {Hardware} Dynamic Instruction Scheduling • Currently the predominant class of processors 4Pentium 4PowerPC 4UltraSparc 4AMD K5- 4HP PA7100- 4DEC α Evolution of superscalar processor Specific tasks of superscalar processing Parallel decoding {and Dependencies check} Decoding and Pre-decoding • What need to be done • Superscalar processors tend to use 2 and sometimes even 3 or more pipeline cycles for decoding and issuing instructions • >> Pre-decoding: 4shifts a part of the decode task up into loading phase 4resulting of pre-decoding f the instruction class f the type of resources required for the execution f in some processor (e.g. UltraSparc), branch target addresses calculation as well 4the results are stored by attaching 4-7 bits • + shortens the overall cycle time or reduces the number of cycles needed The principle of perdecoding Number of perdecode bits used Specific tasks of superscalar processing: Issue 7.3 Superscalar instruction issue • How and when to send the instruction(s) to EU(s) Instruction issue policies of superscalar processors: Issue policies ---Performance, tread-----Æ Issue rate {How many instructions/cycle} Issue policies: Handing Issue Blockages • CISC about 2 • RISC: Issue stopped by True dependency Issue order of instructions • True dependency Æ (Blocked: need to wait) Aligned vs. -

Parallel Architectures MICHAEL J
Parallel Architectures MICHAEL J. FLYNN AND KEVIN W. RUDD Stanford University ^[email protected]&; ^[email protected]& PARALLEL ARCHITECTURES currently performing different phases of processing an instruction. This does not Parallel or concurrent operation has achieve concurrency of execution (with many different forms within a computer system. Using a model based on the multiple actions being taken on objects) different streams used in the computa- but does achieve a concurrency of pro- tion process, we represent some of the cessing—an improvement in efficiency different kinds of parallelism available. upon which almost all processors de- A stream is a sequence of objects such pend today. as data, or of actions such as instruc- Techniques that exploit concurrency tions. Each stream is independent of all of execution, often called instruction- other streams, and each element of a level parallelism (ILP), are also com- stream can consist of one or more ob- mon. Two architectures that exploit ILP jects or actions. We thus have four com- are superscalar and VLIW (very long binations that describe most familiar parallel architectures: instruction word). These techniques schedule different operations to execute (1) SISD: single instruction, single data concurrently based on analyzing the de- stream. This is the traditional uni- pendencies between the operations processor [Figure 1(a)]. within the instruction stream—dynami- (2) SIMD: single instruction, multiple cally at run time in a superscalar pro- data stream. This includes vector cessor and statically at compile time in processors as well as massively par- a VLIW processor. Both ILP approaches allel processors [Figure 1(b)]. -

STRAIGHT: Realizing a Lightweight Large Instruction Window by Using Eventually Consistent Distributed Registers
2012 Third International Conference on Networking and Computing STRAIGHT: Realizing a Lightweight Large Instruction Window by using Eventually Consistent Distributed Registers Hidetsugu IRIE∗, Daisuke FUJIWARA∗, Kazuki MAJIMA∗, Tsutomu YOSHINAGA∗ ∗The University of Electro-Communications 1-5-1 Chofugaoka, Chofu-shi, Tokyo 182-8585, Japan E-mail: [email protected], [email protected], [email protected], [email protected] Abstract—As the number of cores as well as the network size programs. For scale-out applications, we assume the manycore in a processor chip increases, the performance of each core is processor structure, which consists of a number of STRAIGHT more critical for the improvement of the total chip performance. architecture cores (SAC) that are loosely connected each other. However, to improve the total chip performance, the performance per power or per unit area must be improved, making it difficult Being the first report on this novel processor architecture, in to adopt a conventional approach of superscalar extension. In this paper, we discuss the concept behind STRAIGHT, propose this paper, we explore a new core structure that is suitable for basic principles, and estimate the performance and budget manycore processors. We revisit prior studies of new instruction- expectation. The rest of the paper consists of following sec- level (ILP) and thread-level parallelism (TLP) architectures tions. Section II revisits studies of new architectures that were and propose our novel STRAIGHT processor architecture. By introducing the scheme of distributed key-value-store to the designed to improve the ILP/TLP performance of superscalar register file of clustered microarchitectures, STRAIGHT directly processors, and discusses the dilemma of both scalability executes the operation with large logical registers, which are approach and quick worker approach.