Dynamical Systems Notes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Communications with Chaotic Optoelectronic Systems Cryptography and Multiplexing
COMMUNICATIONS WITH CHAOTIC OPTOELECTRONIC SYSTEMS CRYPTOGRAPHY AND MULTIPLEXING A Thesis Presented to The Academic Faculty by Damien Rontani In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the School of Electrical and Computer Engineering Georgia Institute of Technology December 2011 Copyright c 2011 by Damien Rontani COMMUNICATIONS WITH CHAOTIC OPTOELECTRONIC SYSTEMS CRYPTOGRAPHY AND MULTIPLEXING Approved by: Professor Steven W. McLaughlin, Professor Erik Verriest Committee Chair School of Electrical and Computer School of Electrical and Computer Engineering Engineering Georgia Institute of Technology Georgia Institute of Technology Professor David S. Citrin, Advisor Adjunct Professor Alexandre Locquet School of Electrical and Computer School of Electrical and Computer Engineering Engineering Georgia Institute of Technology Georgia Institute of Technology Professor Marc Sciamanna, Co-advisor Professor Kurt Wiesenfeld Department of Optical School of Physics Communications Georgia Institute of Technology Ecole Sup´erieure d'Electricit´e Professor William T. Rhodes Date Approved: 30 August 2011 School of Electrical and Computer Engineering Georgia Institute of Technology To those who have made me who I am today, iii ACKNOWLEDGEMENTS The present PhD research has been prepared in the framework of collaboration between the Georgia Institute of Technology (Georgia Tech, USA) and the Ecole Sup´erieured'Electricit´e(Sup´elec,France), at the UMI 2958 a joint Laboratory be- tween Georgia Tech and the Centre National de la Recherche Scientifique (CNRS, France). I would like to acknowledge the Fondation Sup´elec,the Conseil R´egionalde Lorraine, Georgia Tech, and the National Science Foundation (NSF) for their financial and technical support. I would like to sincerely thank my \research family" starting with my two advisors who made this joint-PhD project possible; Prof. -

Recurrence Plots for the Analysis of Complex Systems Norbert Marwan∗, M
Physics Reports 438 (2007) 237–329 www.elsevier.com/locate/physrep Recurrence plots for the analysis of complex systems Norbert Marwan∗, M. Carmen Romano, Marco Thiel, Jürgen Kurths Nonlinear Dynamics Group, Institute of Physics, University of Potsdam, Potsdam 14415, Germany Accepted 3 November 2006 Available online 12 January 2007 editor: I. Procaccia Abstract Recurrence is a fundamental property of dynamical systems, which can be exploited to characterise the system’s behaviour in phase space. A powerful tool for their visualisation and analysis called recurrence plot was introduced in the late 1980’s. This report is a comprehensive overview covering recurrence based methods and their applications with an emphasis on recent developments. After a brief outline of the theory of recurrences, the basic idea of the recurrence plot with its variations is presented. This includes the quantification of recurrence plots, like the recurrence quantification analysis, which is highly effective to detect, e. g., transitions in the dynamics of systems from time series. A main point is how to link recurrences to dynamical invariants and unstable periodic orbits. This and further evidence suggest that recurrences contain all relevant information about a system’s behaviour. As the respective phase spaces of two systems change due to coupling, recurrence plots allow studying and quantifying their interaction. This fact also provides us with a sensitive tool for the study of synchronisation of complex systems. In the last part of the report several applications of recurrence plots in economy, physiology, neuroscience, earth sciences, astrophysics and engineering are shown. The aim of this work is to provide the readers with the know how for the application of recurrence plot based methods in their own field of research. -

CHAOS and DYNAMICAL SYSTEMS Spring 2021 Lectures: Monday, Wednesday, 11:00–12:15PM ET Recitation: Friday, 12:30–1:45PM ET
MATH-UA 264.001 – CHAOS AND DYNAMICAL SYSTEMS Spring 2021 Lectures: Monday, Wednesday, 11:00–12:15PM ET Recitation: Friday, 12:30–1:45PM ET Objectives Dynamical systems theory is the branch of mathematics that studies the properties of iterated action of maps on spaces. It provides a mathematical framework to characterize a great variety of time-evolving phenomena in areas such as physics, ecology, and finance, among many other disciplines. In this class we will study dynamical systems that evolve in discrete time, as well as continuous-time dynamical systems described by ordinary di↵erential equations. Of particular focus will be to explore and understand the qualitative properties of dynamics, such as the existence of attractors, periodic orbits and chaos. We will do this by means of mathematical analysis, as well as simple numerical experiments. List of topics • One- and two-dimensional maps. • Linearization, stable and unstable manifolds. • Attractors, chaotic behavior of maps. • Linear and nonlinear continuous-time systems. • Limit sets, periodic orbits. • Chaos in di↵erential equations, Lyapunov exponents. • Bifurcations. Contact and office hours • Instructor: Dimitris Giannakis, [email protected]. Office hours: Monday 5:00-6:00PM and Wednesday 4:30–5:30PM ET. • Recitation Leader: Wenjing Dong, [email protected]. Office hours: Tuesday 4:00-5:00PM ET. Textbooks • Required: – Alligood, Sauer, Yorke, Chaos: An Introduction to Dynamical Systems, Springer. Available online at https://link.springer.com/book/10.1007%2Fb97589. • Recommended: – Strogatz, Nonlinear Dynamics and Chaos. – Hirsch, Smale, Devaney, Di↵erential Equations, Dynamical Systems, and an Introduction to Chaos. Available online at https://www.sciencedirect.com/science/book/9780123820105. -

Dynamical Systems Theory for Causal Inference with Application to Synthetic Control Methods
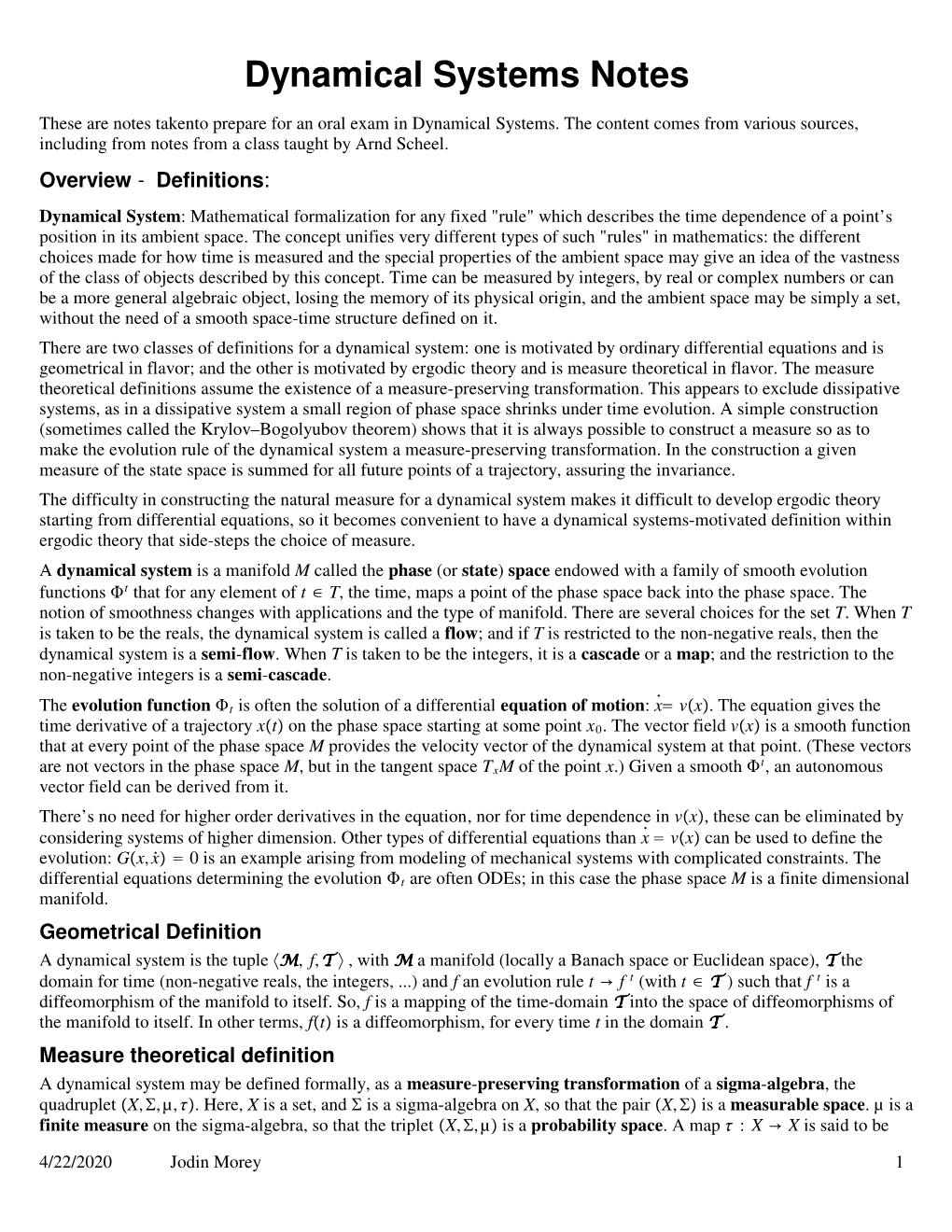
Dynamical Systems Theory for Causal Inference with Application to Synthetic Control Methods Yi Ding Panos Toulis University of Chicago University of Chicago Department of Computer Science Booth School of Business Abstract In this paper, we adopt results in nonlinear time series analysis for causal inference in dynamical settings. Our motivation is policy analysis with panel data, particularly through the use of “synthetic control” methods. These methods regress pre-intervention outcomes of the treated unit to outcomes from a pool of control units, and then use the fitted regres- sion model to estimate causal effects post- intervention. In this setting, we propose to screen out control units that have a weak dy- Figure 1: A Lorenz attractor plotted in 3D. namical relationship to the treated unit. In simulations, we show that this method can mitigate bias from “cherry-picking” of control However, in many real-world settings, different vari- units, which is usually an important concern. ables exhibit dynamic interdependence, sometimes We illustrate on real-world applications, in- showing positive correlation and sometimes negative. cluding the tobacco legislation example of Such ephemeral correlations can be illustrated with Abadie et al.(2010), and Brexit. a popular dynamical system shown in Figure1, the Lorenz system (Lorenz, 1963). The trajectory resem- bles a butterfly shape indicating varying correlations 1 Introduction at different times: in one wing of the shape, variables X and Y appear to be positively correlated, and in the In causal inference, we compare outcomes of units who other they are negatively correlated. Such dynamics received the treatment with outcomes from units who present new methodological challenges for causal in- did not. -

Deterministic Brownian Motion: the Effects of Perturbing a Dynamical
1 Deterministic Brownian Motion: The Effects of Perturbing a Dynamical System by a Chaotic Semi-Dynamical System Michael C. Mackey∗and Marta Tyran-Kami´nska † October 26, 2018 Abstract Here we review and extend central limit theorems for highly chaotic but deterministic semi- dynamical discrete time systems. We then apply these results show how Brownian motion-like results are recovered, and how an Ornstein-Uhlenbeck process results within a totally determin- istic framework. These results illustrate that the contamination of experimental data by “noise” may, under certain circumstances, be alternately interpreted as the signature of an underlying chaotic process. Contents 1 Introduction 2 2 Semi-dynamical systems 5 2.1 Density evolution operators . ......... 5 2.2 Probabilistic and ergodic properties of density evolution ................ 12 2.3 Brownian motion from deterministic perturbations . ............... 16 2.3.1 Centrallimittheorems. ..... 16 2.3.2 FCLTfornoninvertiblemaps . ..... 20 2.4 Weak convergence criteria . ........ 31 3 Analysis 33 3.1 Weak convergence of v(tn) and vn. ............................ 35 3.2 Thelinearcaseinonedimension . ........ 36 3.2.1 Behaviour of the velocity variable . ......... 36 3.2.2 Behaviour of the position variable . ........ 38 4 Identifying the Limiting Velocity Distribution 41 4.1 Dyadicmap....................................... 42 arXiv:cond-mat/0408330v1 [cond-mat.stat-mech] 13 Aug 2004 4.2 Graphical illustration of the velocity density evolution with dyadic map perturbations 45 4.3 r-dyadicmap ..................................... 45 ∗e-mail: [email protected], Departments of Physiology, Physics & Mathematics and Centre for Nonlinear Dynamics, McGill University, 3655 Promenade Sir William Osler, Montreal, QC, CANADA, H3G 1Y6 †Corresponding author, email: [email protected], Institute of Mathematics, Silesian University, ul. -

THE LORENZ SYSTEM Math118, O. Knill GLOBAL EXISTENCE
THE LORENZ SYSTEM Math118, O. Knill GLOBAL EXISTENCE. Remember that nonlinear differential equations do not necessarily have global solutions like d=dtx(t) = x2(t). If solutions do not exist for all times, there is a finite τ such that x(t) for t τ. j j ! 1 ! ABSTRACT. In this lecture, we have a closer look at the Lorenz system. LEMMA. The Lorenz system has a solution x(t) for all times. THE LORENZ SYSTEM. The differential equations Since we have a trapping region, the Lorenz differential equation exist for all times t > 0. If we run time _ 2 2 2 ct x_ = σ(y x) backwards, we have V = 2σ(rx + y + bz 2brz) cV for some constant c. Therefore V (t) V (0)e . − − ≤ ≤ y_ = rx y xz − − THE ATTRACTING SET. The set K = t> Tt(E) is invariant under the differential equation. It has zero z_ = xy bz : T 0 − volume and is called the attracting set of the Lorenz equations. It contains the unstable manifold of O. are called the Lorenz system. There are three parameters. For σ = 10; r = 28; b = 8=3, Lorenz discovered in 1963 an interesting long time behavior and an EQUILIBRIUM POINTS. Besides the origin O = (0; 0; 0, we have two other aperiodic "attractor". The picture to the right shows a numerical integration equilibrium points. C = ( b(r 1); b(r 1); r 1). For r < 1, all p − p − − of an orbit for t [0; 40]. solutions are attracted to the origin. At r = 1, the two equilibrium points 2 appear with a period doubling bifurcation. -

Chapter 5. Flow Maps and Dynamical Systems
Chapter 5 Flow Maps and Dynamical Systems Main concepts: In this chapter we introduce the concepts of continuous and discrete dynamical systems on phase space. Keywords are: classical mechanics, phase space, vector field, linear systems, flow maps, dynamical systems Figure 5.1: A solar system is well modelled by classical mechanics. (source: Wikimedia Commons) In Chapter 1 we encountered a variety of ODEs in one or several variables. Only in a few cases could we write out the solution in a simple closed form. In most cases, the solutions will only be obtainable in some approximate sense, either from an asymptotic expansion or a numerical computation. Yet, as discussed in Chapter 3, many smooth systems of differential equations are known to have solutions, even globally defined ones, and so in principle we can suppose the existence of a trajectory through each point of phase space (or through “almost all” initial points). For such systems we will use the existence of such a solution to define a map called the flow map that takes points forward t units in time from their initial points. The concept of the flow map is very helpful in exploring the qualitative behavior of numerical methods, since it is often possible to think of numerical methods as approximations of the flow map and to evaluate methods by comparing the properties of the map associated to the numerical scheme to those of the flow map. 25 26 CHAPTER 5. FLOW MAPS AND DYNAMICAL SYSTEMS In this chapter we will address autonomous ODEs (recall 1.13) only: 0 d y = f(y), y, f ∈ R (5.1) 5.1 Classical mechanics In Chapter 1 we introduced models from population dynamics. -

Chaotic Multiobjective Evolutionary Algorithm Based on Decomposition for Test Task Scheduling Problem
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 640764, 25 pages http://dx.doi.org/10.1155/2014/640764 Research Article Chaotic Multiobjective Evolutionary Algorithm Based on Decomposition for Test Task Scheduling Problem Hui Lu, Lijuan Yin, Xiaoteng Wang, Mengmeng Zhang, and Kefei Mao School of Electronic and Information Engineering, Beihang University, Beijing 100191, China Correspondence should be addressed to Hui Lu; [email protected] Received 13 March 2014; Revised 20 June 2014; Accepted 20 June 2014; Published 15 July 2014 Academic Editor: Jyh-Hong Chou Copyright © 2014 Hui Lu et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Test task scheduling problem (TTSP) is a complex optimization problem and has many local optima. In this paper, a hybrid chaotic multiobjective evolutionary algorithm based on decomposition (CMOEA/D) is presented to avoid becoming trapped in local optima and to obtain high quality solutions. First, we propose an improving integrated encoding scheme (IES) to increase the efficiency. Then ten chaotic maps are applied into the multiobjective evolutionary algorithm based on decomposition (MOEA/D) in three phases, that is, initial population and crossover and mutation operators. To identify a good approach for hybrid MOEA/D and chaos and indicate the effectiveness of the improving IES several experiments are performed. The Pareto front and the statistical results demonstrate that different chaotic maps in different phases have different effects for solving the TTSP especially the circle map and ICMIC map. -

Enhanced Multi Chaotic Systems Based Pixel Shuffling for Encryption
A Major Project Report On Enhanced Multi Chaotic Systems Based Pixel Shuffling for Encryption Submitted in partial fulfilment of the requirements for the award of the degree of Master of Technology In Information Systems Submitted By: MUNAZZA NIZAM Roll No. 07/IS/2010 Under the Guidance of Prof. O. P. Verma (HOD, IT Department) Department of Information Technology DELHI TECHNOLOGICAL UNIVERSITY Bawana Road, Delhi-110042 2010-2012 CERTIFICATE This is to certify that Ms. Munazza Nizam (07/IS/2010) has carried out the major project titled “Enhanced Multi-Chaotic Systems Based Pixel Shuffling for Encryption” as a partial requirement for the award of Master of Technology degree in Information Systems by Delhi Technological University. The major project is a bonafide piece of work carried out and completed under my supervision and guidance during the academic session 2010-2012. The matter contained in this report has not been submitted elsewhere for the award of any other degree. Prof. O. P. Verma (Project Guide) Head of Department Department of Information Technology Delhi Technological University Bawana Road, Delhi-110042 i ACKNOWLEDGEMENT It’s true and proved that behind every success, there is certainly an unseen power of Almighty Allah, He is the grand operator of all projects. First of all, I thank my parents who have always motivated me and given their blessings for all my endeavors. I take this opportunity to express my profound sense of gratitude and respect to all those who helped me throughout the duration of this project. I would like to express my sincere gratitude to Prof. O.P. -

Role of Nonlinear Dynamics and Chaos in Applied Sciences
v.;.;.:.:.:.;.;.^ ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Oivisipn 2000 Please be aware that all of the Missing Pages in this document were originally blank pages BARC/2OOO/E/OO3 GOVERNMENT OF INDIA ATOMIC ENERGY COMMISSION ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Division BHABHA ATOMIC RESEARCH CENTRE MUMBAI, INDIA 2000 BARC/2000/E/003 BIBLIOGRAPHIC DESCRIPTION SHEET FOR TECHNICAL REPORT (as per IS : 9400 - 1980) 01 Security classification: Unclassified • 02 Distribution: External 03 Report status: New 04 Series: BARC External • 05 Report type: Technical Report 06 Report No. : BARC/2000/E/003 07 Part No. or Volume No. : 08 Contract No.: 10 Title and subtitle: Role of nonlinear dynamics and chaos in applied sciences 11 Collation: 111 p., figs., ills. 13 Project No. : 20 Personal authors): Quissan V. Lawande; Nirupam Maiti 21 Affiliation ofauthor(s): Theoretical Physics Division, Bhabha Atomic Research Centre, Mumbai 22 Corporate authoifs): Bhabha Atomic Research Centre, Mumbai - 400 085 23 Originating unit : Theoretical Physics Division, BARC, Mumbai 24 Sponsors) Name: Department of Atomic Energy Type: Government Contd...(ii) -l- 30 Date of submission: January 2000 31 Publication/Issue date: February 2000 40 Publisher/Distributor: Head, Library and Information Services Division, Bhabha Atomic Research Centre, Mumbai 42 Form of distribution: Hard copy 50 Language of text: English 51 Language of summary: English 52 No. of references: 40 refs. 53 Gives data on: Abstract: Nonlinear dynamics manifests itself in a number of phenomena in both laboratory and day to day dealings. -

Tom W B Kibble Frank H Ber
Classical Mechanics 5th Edition Classical Mechanics 5th Edition Tom W.B. Kibble Frank H. Berkshire Imperial College London Imperial College Press ICP Published by Imperial College Press 57 Shelton Street Covent Garden London WC2H 9HE Distributed by World Scientific Publishing Co. Pte. Ltd. 5 Toh Tuck Link, Singapore 596224 USA office: Suite 202, 1060 Main Street, River Edge, NJ 07661 UK office: 57 Shelton Street, Covent Garden, London WC2H 9HE Library of Congress Cataloging-in-Publication Data Kibble, T. W. B. Classical mechanics / Tom W. B. Kibble, Frank H. Berkshire, -- 5th ed. p. cm. Includes bibliographical references and index. ISBN 1860944248 -- ISBN 1860944353 (pbk). 1. Mechanics, Analytic. I. Berkshire, F. H. (Frank H.). II. Title QA805 .K5 2004 531'.01'515--dc 22 2004044010 British Library Cataloguing-in-Publication Data A catalogue record for this book is available from the British Library. Copyright © 2004 by Imperial College Press All rights reserved. This book, or parts thereof, may not be reproduced in any form or by any means, electronic or mechanical, including photocopying, recording or any information storage and retrieval system now known or to be invented, without written permission from the Publisher. For photocopying of material in this volume, please pay a copying fee through the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, USA. In this case permission to photocopy is not required from the publisher. Printed in Singapore. To Anne and Rosie vi Preface This book, based on courses given to physics and applied mathematics stu- dents at Imperial College, deals with the mechanics of particles and rigid bodies. -

A Pseudo Random Numbers Generator Based on Chaotic Iterations
A Pseudo Random Numbers Generator Based on Chaotic Iterations. Application to Watermarking Christophe Guyeux, Qianxue Wang, Jacques Bahi To cite this version: Christophe Guyeux, Qianxue Wang, Jacques Bahi. A Pseudo Random Numbers Generator Based on Chaotic Iterations. Application to Watermarking. WISM 2010, Int. Conf. on Web Information Systems and Mining, 2010, China. pp.202–211. hal-00563317 HAL Id: hal-00563317 https://hal.archives-ouvertes.fr/hal-00563317 Submitted on 4 Feb 2011 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. A Pseudo Random Numbers Generator Based on Chaotic Iterations. Application to Watermarking Christophe Guyeux, Qianxue Wang, and Jacques M. Bahi University of Franche-Comte, Computer Science Laboratory LIFC, 25030 Besanc¸on Cedex, France {christophe.guyeux,qianxue.wang, jacques.bahi}@univ-fcomte.fr Abstract. In this paper, a new chaotic pseudo-random number generator (PRNG) is proposed. It combines the well-known ISAAC and XORshift generators with chaotic iterations. This PRNG possesses important properties of topological chaos and can successfully pass NIST and TestU01 batteries of tests. This makes our generator suitable for information security applications like cryptography. As an illustrative example, an application in the field of watermarking is presented.