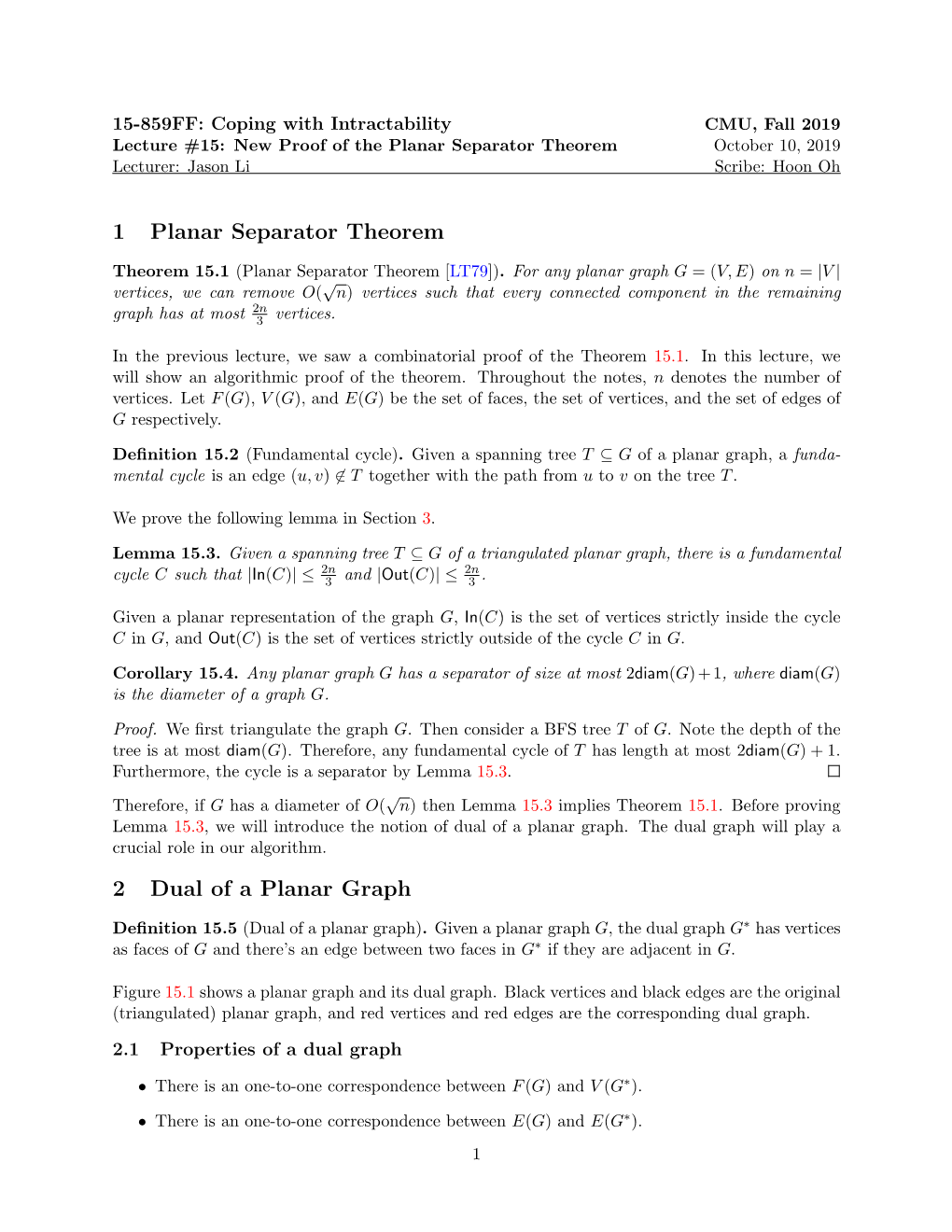
1 Planar Separator Theorem 2 Dual of a Planar Graph
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Planar Graph Theory We Say That a Graph Is Planar If It Can Be Drawn in the Plane Without Edges Crossing
Planar Graph Theory We say that a graph is planar if it can be drawn in the plane without edges crossing. We use the term plane graph to refer to a planar depiction of a planar graph. e.g. K4 is a planar graph Q1: The following is also planar. Find a plane graph version of the graph. A B F E D C A Method that sometimes works for drawing the plane graph for a planar graph: 1. Find the largest cycle in the graph. 2. The remaining edges must be drawn inside/outside the cycle so that they do not cross each other. Q2: Using the method above, find a plane graph version of the graph below. A B C D E F G H non e.g. K3,3: K5 Here are three (plane graph) depictions of the same planar graph: J N M J K J N I M K K I N M I O O L O L L A face of a plane graph is a region enclosed by the edges of the graph. There is also an unbounded face, which is the outside of the graph. Q3: For each of the plane graphs we have drawn, find: V = # of vertices of the graph E = # of edges of the graph F = # of faces of the graph Q4: Do you have a conjecture for an equation relating V, E and F for any plane graph G? Q5: Can you name the 5 Platonic Solids (i.e. regular polyhedra)? (This is a geometry question.) Q6: Find the # of vertices, # of edges and # of faces for each Platonic Solid. -

Linear Algebraic Techniques for Spanning Tree Enumeration
LINEAR ALGEBRAIC TECHNIQUES FOR SPANNING TREE ENUMERATION STEVEN KLEE AND MATTHEW T. STAMPS Abstract. Kirchhoff's Matrix-Tree Theorem asserts that the number of spanning trees in a finite graph can be computed from the determinant of any of its reduced Laplacian matrices. In many cases, even for well-studied families of graphs, this can be computationally or algebraically taxing. We show how two well-known results from linear algebra, the Matrix Determinant Lemma and the Schur complement, can be used to elegantly count the spanning trees in several significant families of graphs. 1. Introduction A graph G consists of a finite set of vertices and a set of edges that connect some pairs of vertices. For the purposes of this paper, we will assume that all graphs are simple, meaning they do not contain loops (an edge connecting a vertex to itself) or multiple edges between a given pair of vertices. We will use V (G) and E(G) to denote the vertex set and edge set of G respectively. For example, the graph G with V (G) = f1; 2; 3; 4g and E(G) = ff1; 2g; f2; 3g; f3; 4g; f1; 4g; f1; 3gg is shown in Figure 1. A spanning tree in a graph G is a subgraph T ⊆ G, meaning T is a graph with V (T ) ⊆ V (G) and E(T ) ⊆ E(G), that satisfies three conditions: (1) every vertex in G is a vertex in T , (2) T is connected, meaning it is possible to walk between any two vertices in G using only edges in T , and (3) T does not contain any cycles. -

Matroid Theory
MATROID THEORY HAYLEY HILLMAN 1 2 HAYLEY HILLMAN Contents 1. Introduction to Matroids 3 1.1. Basic Graph Theory 3 1.2. Basic Linear Algebra 4 2. Bases 5 2.1. An Example in Linear Algebra 6 2.2. An Example in Graph Theory 6 3. Rank Function 8 3.1. The Rank Function in Graph Theory 9 3.2. The Rank Function in Linear Algebra 11 4. Independent Sets 14 4.1. Independent Sets in Graph Theory 14 4.2. Independent Sets in Linear Algebra 17 5. Cycles 21 5.1. Cycles in Graph Theory 22 5.2. Cycles in Linear Algebra 24 6. Vertex-Edge Incidence Matrix 25 References 27 MATROID THEORY 3 1. Introduction to Matroids A matroid is a structure that generalizes the properties of indepen- dence. Relevant applications are found in graph theory and linear algebra. There are several ways to define a matroid, each relate to the concept of independence. This paper will focus on the the definitions of a matroid in terms of bases, the rank function, independent sets and cycles. Throughout this paper, we observe how both graphs and matrices can be viewed as matroids. Then we translate graph theory to linear algebra, and vice versa, using the language of matroids to facilitate our discussion. Many proofs for the properties of each definition of a matroid have been omitted from this paper, but you may find complete proofs in Oxley[2], Whitney[3], and Wilson[4]. The four definitions of a matroid introduced in this paper are equiv- alent to each other. -

Teacher's Guide for Spanning and Weighted Spanning Trees
Teacher’s Guide for Spanning and weighted spanning trees: a different kind of optimization by sarah-marie belcastro 1TheMath. Let’s talk about spanning trees. No, actually, first let’s talk about graph theory,theareaof mathematics within which the topic of spanning trees lies. 1.1 Graph Theory Background. Informally, a graph is a collection of vertices (that look like dots) and edges (that look like curves), where each edge joins two vertices. Formally, A graph is a pair G =(V,E), where V is a set of dots and E is a set of pairs of vertices. Here are a few examples of graphs, in Figure 1: e b f a Figure 1: Examples of graphs. Note that the word vertex is singular; its plural is vertices. Two vertices that are joined by an edge are called adjacent. For example, the vertices labeled a and b in the leftmost graph of Figure 1 are adjacent. Two edges that meet at a vertex are called incident. For example, the edges labeled e and f in the leftmost graph of Figure 1 are incident. A subgraph is a graph that is contained within another graph. For example, in Figure 1 the second graph is a subgraph of the fourth graph. You can see this at left in Figure 2 where the subgraph in question is emphasized. Figure 2: More examples of graphs. In a connected graph, there is a way to get from any vertex to any other vertex without leaving the graph. The second graph of Figure 2 is not connected. -

Introduction to Spanning Tree Protocol by George Thomas, Contemporary Controls
Volume6•Issue5 SEPTEMBER–OCTOBER 2005 © 2005 Contemporary Control Systems, Inc. Introduction to Spanning Tree Protocol By George Thomas, Contemporary Controls Introduction powered and its memory cleared (Bridge 2 will be added later). In an industrial automation application that relies heavily Station 1 sends a message to on the health of the Ethernet network that attaches all the station 11 followed by Station 2 controllers and computers together, a concern exists about sending a message to Station 11. what would happen if the network fails? Since cable failure is These messages will traverse the the most likely mishap, cable redundancy is suggested by bridge from one LAN to the configuring the network in either a ring or by carrying parallel other. This process is called branches. If one of the segments is lost, then communication “relaying” or “forwarding.” The will continue down a parallel path or around the unbroken database in the bridge will note portion of the ring. The problem with these approaches is the source addresses of Stations that Ethernet supports neither of these topologies without 1 and 2 as arriving on Port A. This special equipment. However, this issue is addressed in an process is called “learning.” When IEEE standard numbered 802.1D that covers bridges, and in Station 11 responds to either this standard the concept of the Spanning Tree Protocol Station 1 or 2, the database will (STP) is introduced. note that Station 11 is on Port B. IEEE 802.1D If Station 1 sends a message to Figure 1. The addition of Station 2, the bridge will do ANSI/IEEE Std 802.1D, 1998 edition addresses the Bridge 2 creates a loop. -

Sampling Random Spanning Trees Faster Than Matrix Multiplication
Sampling Random Spanning Trees Faster than Matrix Multiplication David Durfee∗ Rasmus Kyng† John Peebles‡ Anup B. Rao§ Sushant Sachdeva¶ Abstract We present an algorithm that, with high probability, generates a random spanning tree from an edge-weighted undirected graph in Oe(n4/3m1/2 + n2) time 1. The tree is sampled from a distribution where the probability of each tree is proportional to the product of its edge weights. This improves upon the previous best algorithm due to Colbourn et al. that runs in matrix ω multiplication time, O(n ). For the special case of unweighted√ graphs, this improves upon the best previously known running time of O˜(min{nω, m n, m4/3}) for m n5/3 (Colbourn et al. ’96, Kelner-Madry ’09, Madry et al. ’15). The effective resistance metric is essential to our algorithm, as in the work of Madry et al., but we eschew determinant-based and random walk-based techniques used by previous algorithms. Instead, our algorithm is based on Gaussian elimination, and the fact that effective resistance is preserved in the graph resulting from eliminating a subset of vertices (called a Schur complement). As part of our algorithm, we show how to compute -approximate effective resistances for a set S of vertex pairs via approximate Schur complements in Oe(m + (n + |S|)−2) time, without using the Johnson-Lindenstrauss lemma which requires Oe(min{(m + |S|)−2, m + n−4 + |S|−2}) time. We combine this approximation procedure with an error correction procedure for handing edges where our estimate isn’t sufficiently accurate. -

Matroids You Have Known
26 MATHEMATICS MAGAZINE Matroids You Have Known DAVID L. NEEL Seattle University Seattle, Washington 98122 [email protected] NANCY ANN NEUDAUER Pacific University Forest Grove, Oregon 97116 nancy@pacificu.edu Anyone who has worked with matroids has come away with the conviction that matroids are one of the richest and most useful ideas of our day. —Gian Carlo Rota [10] Why matroids? Have you noticed hidden connections between seemingly unrelated mathematical ideas? Strange that finding roots of polynomials can tell us important things about how to solve certain ordinary differential equations, or that computing a determinant would have anything to do with finding solutions to a linear system of equations. But this is one of the charming features of mathematics—that disparate objects share similar traits. Properties like independence appear in many contexts. Do you find independence everywhere you look? In 1933, three Harvard Junior Fellows unified this recurring theme in mathematics by defining a new mathematical object that they dubbed matroid [4]. Matroids are everywhere, if only we knew how to look. What led those junior-fellows to matroids? The same thing that will lead us: Ma- troids arise from shared behaviors of vector spaces and graphs. We explore this natural motivation for the matroid through two examples and consider how properties of in- dependence surface. We first consider the two matroids arising from these examples, and later introduce three more that are probably less familiar. Delving deeper, we can find matroids in arrangements of hyperplanes, configurations of points, and geometric lattices, if your tastes run in that direction. -

Characterizations of Restricted Pairs of Planar Graphs Allowing Simultaneous Embedding with Fixed Edges
Characterizations of Restricted Pairs of Planar Graphs Allowing Simultaneous Embedding with Fixed Edges J. Joseph Fowler1, Michael J¨unger2, Stephen Kobourov1, and Michael Schulz2 1 University of Arizona, USA {jfowler,kobourov}@cs.arizona.edu ⋆ 2 University of Cologne, Germany {mjuenger,schulz}@informatik.uni-koeln.de ⋆⋆ Abstract. A set of planar graphs share a simultaneous embedding if they can be drawn on the same vertex set V in the Euclidean plane without crossings between edges of the same graph. Fixed edges are common edges between graphs that share the same simple curve in the simultaneous drawing. Determining in polynomial time which pairs of graphs share a simultaneous embedding with fixed edges (SEFE) has been open. We give a necessary and sufficient condition for when a pair of graphs whose union is homeomorphic to K5 or K3,3 can have an SEFE. This allows us to determine which (outer)planar graphs always an SEFE with any other (outer)planar graphs. In both cases, we provide efficient al- gorithms to compute the simultaneous drawings. Finally, we provide an linear-time decision algorithm for deciding whether a pair of biconnected outerplanar graphs has an SEFE. 1 Introduction In many practical applications including the visualization of large graphs and very-large-scale integration (VLSI) of circuits on the same chip, edge crossings are undesirable. A single vertex set can be used with multiple edge sets that each correspond to different edge colors or circuit layers. While the pairwise union of all edge sets may be nonplanar, a planar drawing of each layer may be possible, as crossings between edges of distinct edge sets are permitted. -

Incremental Dynamic Construction of Layered Polytree Networks )
440 Incremental Dynamic Construction of Layered Polytree Networks Keung-Chi N g Tod S. Levitt lET Inc., lET Inc., 14 Research Way, Suite 3 14 Research Way, Suite 3 E. Setauket, NY 11733 E. Setauket , NY 11733 [email protected] [email protected] Abstract Many exact probabilistic inference algorithms1 have been developed and refined. Among the earlier meth ods, the polytree algorithm (Kim and Pearl 1983, Certain classes of problems, including per Pearl 1986) can efficiently update singly connected ceptual data understanding, robotics, discov belief networks (or polytrees) , however, it does not ery, and learning, can be represented as incre work ( without modification) on multiply connected mental, dynamically constructed belief net networks. In a singly connected belief network, there is works. These automatically constructed net at most one path (in the undirected sense) between any works can be dynamically extended and mod pair of nodes; in a multiply connected belief network, ified as evidence of new individuals becomes on the other hand, there is at least one pair of nodes available. The main result of this paper is the that has more than one path between them. Despite incremental extension of the singly connect the fact that the general updating problem for mul ed polytree network in such a way that the tiply connected networks is NP-hard (Cooper 1990), network retains its singly connected polytree many propagation algorithms have been applied suc structure after the changes. The algorithm cessfully to multiply connected networks, especially on is deterministic and is guaranteed to have networks that are sparsely connected. These methods a complexity of single node addition that is include clustering (also known as node aggregation) at most of order proportional to the number (Chang and Fung 1989, Pearl 1988), node elimination of nodes (or size) of the network. -

A Framework for the Evaluation and Management of Network Centrality ∗
A Framework for the Evaluation and Management of Network Centrality ∗ Vatche Ishakiany D´oraErd}osz Evimaria Terzix Azer Bestavros{ Abstract total number of shortest paths that go through it. Ever Network-analysis literature is rich in node-centrality mea- since, researchers have proposed different measures of sures that quantify the centrality of a node as a function centrality, as well as algorithms for computing them [1, of the (shortest) paths of the network that go through it. 2, 4, 10, 11]. The common characteristic of these Existing work focuses on defining instances of such mea- measures is that they quantify a node's centrality by sures and designing algorithms for the specific combinato- computing the number (or the fraction) of (shortest) rial problems that arise for each instance. In this work, we paths that go through that node. For example, in a propose a unifying definition of centrality that subsumes all network where packets propagate through nodes, a node path-counting based centrality definitions: e.g., stress, be- with high centrality is one that \sees" (and potentially tweenness or paths centrality. We also define a generic algo- controls) most of the traffic. rithm for computing this generalized centrality measure for In many applications, the centrality of a single node every node and every group of nodes in the network. Next, is not as important as the centrality of a group of we define two optimization problems: k-Group Central- nodes. For example, in a network of lobbyists, one ity Maximization and k-Edge Centrality Boosting. might want to measure the combined centrality of a In the former, the task is to identify the subset of k nodes particular group of lobbyists. -

Separator Theorems and Turán-Type Results for Planar Intersection Graphs
SEPARATOR THEOREMS AND TURAN-TYPE¶ RESULTS FOR PLANAR INTERSECTION GRAPHS JACOB FOX AND JANOS PACH Abstract. We establish several geometric extensions of the Lipton-Tarjan separator theorem for planar graphs. For instance, we show that any collection C of Jordan curves in the plane with a total of m p 2 crossings has a partition into three parts C = S [ C1 [ C2 such that jSj = O( m); maxfjC1j; jC2jg · 3 jCj; and no element of C1 has a point in common with any element of C2. These results are used to obtain various properties of intersection patterns of geometric objects in the plane. In particular, we prove that if a graph G can be obtained as the intersection graph of n convex sets in the plane and it contains no complete bipartite graph Kt;t as a subgraph, then the number of edges of G cannot exceed ctn, for a suitable constant ct. 1. Introduction Given a collection C = fγ1; : : : ; γng of compact simply connected sets in the plane, their intersection graph G = G(C) is a graph on the vertex set C, where γi and γj (i 6= j) are connected by an edge if and only if γi \ γj 6= ;. For any graph H, a graph G is called H-free if it does not have a subgraph isomorphic to H. Pach and Sharir [13] started investigating the maximum number of edges an H-free intersection graph G(C) on n vertices can have. If H is not bipartite, then the assumption that G is an intersection graph of compact convex sets in the plane does not signi¯cantly e®ect the answer. -
Geographic Routing Without Planarization Ben Leong, Barbara Liskov & Robert Morris Require Planarization
Geographic Routing without Planarization Ben Leong, Barbara Liskov & Robert Morris MIT CSAIL Greedy Distributed Spanning Tree Routing (GDSTR) • New geographic routing algorithm – DOES NOT require planarization – uses spanning tree, not planar graph – low maintenance cost – better routing performance than existing algorithms Overview • Background • Problem • Approach • Simulation Results • Conclusion Geographic Routing • Wireless nodes have x-y coordinates – can use virtual coordinates (Rao et al. 2003) • Nodes know coordinates of immediate neighbors • Packet destinations specified with x-y coordinates • In general, forward packets greedily Geographic Routing Geographic Routing Source Geographic Routing Destination Source Greedy Forwarding Destination Source Greedy Forwarding Destination Source Greedy Forwarding Destination Source Greedy Forwarding Destination Source Geographic Routing: Dealing with Dead Ends Destination Source Whoops. Dead end! Face Routing Destination Source Face Routing Destination Source Face Routing Destination Source Back to Greedy Forwarding Destination Source Back to Greedy Forwarding Destination Source Back to Greedy Forwarding Destination Source Planarization is Costly! • Planarization is hard for real networks – GG and RNG don’t work • Planarization is complicated & costly! – CLDP (Kim et al., 2005) Greedy Distributed Spanning Tree Routing (GDSTR) • Route on a spanning tree • Use convex hulls to “summarize” the area covered by a subtree – convex hulls tells us what points are possibly reachable – reduces the