Gas Metal Arc Welding
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Download the Full Amada Promecam ITS Hydraulic Press Brake 45899 Manual
PROMECAM HYDRAULIC PRESS BRAKES I.T.S TECHNICAL MANUEL 63, Rue de Strasbourg 93206 Saint Denis Cedex 1 - FRANCE Tel: 161 4821 60 06 TELEX: 232717 Telec. : 161 48 22 61 57 ... .J ,.~ ,....... , ._".....-. PROMECAM CONTENTS 1 • GENERAL INTRODUCTION ..............................................................1 I 2 2. ~AI=E:T" •••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••• 1 16 2 - 1 CONFORMITY ................................................................................. 1 1 6 2 - 2 SAFETY INSTRUCTIONS FOR PRESS BRAKES ...................................... 1 1 6 2 - 3 RULES FOR SAFE OPERATION ..........................................................2 / 6 3 - IN~TALLATION REQUIREMENT~ •••••••••••••••••••••••••••••••••••••••••••••••••••••• 1 I 4 3 - 1 ELECTRICAL CONNECTION ................................................................ 1 /4 3 - 2 PNEUMATIC SYSTEM ......... '" ............................................................4 1 4 4'. ~rTE AND ENVIRONMENTAL PREPARATION .......................................1 / 2 5 - IN~TALLATION AND TAKING DELIVERY ••••••••••••••••••••••••••••• ,.. .............1 I 4 5 - 1 INSTRUCTIONS BEFORE HANDLING AND INSTALLING ............................ 1 / 4 5 - 2 HANOLING ..................................................................................... 2/4 6 • LEVELING 01= THE MACHINE ••••••••••••• "............................................. 1 I 2 7 • PUTTING MACHINE INTO ~ERVICE •••••••• u .........................................1 I 2 8 • OPERATING -

High Pressure Waterjet
Application Note High Pressure Waterjet A water jet is a cutting tool capable of slicing metal or other materials by using a narrow stream of water at high velocity and pressure, or a mixture of water and an abrasive substance. The process erodes the materials in the same way as water erosion found in nature but accelerated and concentrated through high pressure. It is often used in the fabrication or manufacture of parts for machinery and other industries. It is used in applications in the mining to aerospace industries where it performs operations such as cutting, shaping, carving, and reaming. The water jet is usually connected to a high-pressure water pump (Viatran supplies units at 60K PSI) where the water is then ejected from the nozzle, cutting through the material by spraying it with the jet of high-speed water. Adding suspended grit or other abrasives, such as garnet and aluminum oxide, can accelerate this process. Because the characteristics of the cutting stream can be easily modified, water jets can be used to cut materials from processed food to exotic metals. There are few materials that cannot be effectively cut with a water jet cutter. Two of these are tempered glass and certain ceramics are resistant to water jet cutting. Water jet cuts are not typically limited by the thickness of the material, and are capable of cutting materials over a foot (30 cm) thick. An important benefit of the water jet cutter is the ability to cut material without compromising the material's inherent structure. The effects of heat are minimized by the water jet. -

Proceedings of the Second U.S. Water Jet Conference Held in 1983 at the University of Missouri-Rolla
Proceedings of the Second U.S. WATER JET CONFERENCE May 24-26, 1983 Rolla, Missouri Edited by: David A. Summers and Frank F. Haston Sponsored by School of Mines & Metallurgy, University of Missouri-Rolla Published by: University of Missouri-Rolla, Rolla, Missouri 65401 The University of Missouri-Rolla has granted the WaterJet Technology Association the right to reprint, on the Association's web site, the Proceedings of the Second U.S. Water Jet Conference held in 1983 at the University of Missouri-Rolla. Please Note. This text is a scanned in version of the original. Because of some limitations in our programming the original pagination has been changed. Other than that we have tried to make the text a little more readable by increasing the spacing between paragraphs, but the text itself has been (subject to possible OCR misinterpretations) left as written. 2nd U. S. WATER JET CONFERENCE TABLE OF CONTENTS SESSION 1 - THEORETICAL Chairman: Dr. William Cooley, Terraspace, Rockville, Maryland Dimensionless Pipe Length Analysis for Jet Modulation Systems J.L. Evers, D.L. Eddingfield and J.Y. Yuh College of Engineering and Technology Southern Illinois University at Carbondale Carbondale, Illinois 62901 An Analysis of One Possibility for Pulsating a High Pressure Water Jet M. Mazurkiewicz Rock Mechanics/Explosives Research Center University of Missouri - Rolla Rolla, Missouri 65401 Standoff Distance Improvement Using Percussive Jets E.B. Nebeker Scientific Associates, Inc. Santa Monica, California The Focused Shock Technique for Producing Transient Water Jets G. Gustafsson Department of Mechanical Engineering University of Colorado Boulder, Colorado 80309 SESSION 2 - EXPERIMENTAL & EQUIPMENT Chairman: Dr. -
Design, Manufacture and Simulate a Hydraulic Bending Press
Int. J. Mech. Eng. & Rob. Res. 2013 Manar Abd Elhakim Eltantawie, 2013 ISSN 2278 – 0149 www.ijmerr.com Vol. 2, No. 1, January 2013 © 2013 IJMERR. All Rights Reserved Research Paper DESIGN, MANUFACTURE AND SIMULATE A HYDRAULIC BENDING PRESS Manar Abd Elhakim Eltantawie1* *Corresponding Author: Manar Abd Elhakim Eltantawie, [email protected] A small hydraulic press for V-bending operation is designed, manufactured and modeled. The hydraulic bending press consists of hydraulic circuit, punch, die and PLC control unit. Automation studio and SimHydraulic in Matlab/Simulink library are used to model the hydraulic circuit. Using PLC program, the bending operation is controlled. The press had to be capable of withstanding 2 tons of force. The punch and dies are designed to be rigidly fixed and easily removable, changeable to any kind of forming operation with decreasing of spring back effect of the sheet metal. Keywords: Hydraulic circuit, Bending press, SimHydraulic, Spring-back, PLC INTRODUCTION Hydraulic bending press has many Bending is a metal forming process in which advantages over other type of press, (1) It a force is applied to a piece of sheet metal may cost less than an equivalent mechanical causing bending of it to an angle and forming press. (2) Its production rate is equal to the the desired shape. Bending is typically mechanical press in a small lot of production, performed on a machine called a press brake where hand feeding and single stroking which can be manually or automatically occur. (3) In addition, the die shut heights operated. A press brake contains an upper tool variation do not change the force applied. -

Manuelian Jarce 53 2017.Pdf
The Lost Throne of Queen Hetepheres from Giza: An Archaeological Experiment in Visualization and Fabrication PETER DER MANUELIAN Abstract In 1925, one of the greatest discoveries made at Giza revealed a small, unfinished chamber (labeled “G 7000 X”) more than twenty-seven meters underground, just east of the Great Pyramid. The Harvard University–Boston Museum of Fine Arts Expedition found there the deteriorated burial equipment, sarcophagus, and other objects be- longing to Queen Hetepheres I, presumed consort of Snefru and mother of Khufu. Since the discovery of this rare Old Kingdom royal assemblage, the thousands of small fragments have remained in storage in the Egyptian Museum, Cairo. Meticulous documentation allowed the excavators to reconstruct some of the queen’s furniture. However, the most exquisite piece, her “second” chair or throne, made of cedar with hundreds of faience inlays and completely gilded, was never reconstructed. This paper describes an interdisciplinary collaboration initiated by the Giza Project at Harvard University to create a full-scale reproduction of Hetepheres’s second chair in modern cedar, faience, gold, gesso, and copper. The goals for this visualization experiment were to reconstruct the excavation history, the iconog- raphy, and to document, insofar as possible, the ancient workflow the Egyptians used to construct this Old Kingdom masterpiece. The final results produced a new museum display object and research/teaching tool. Two significant features of Hetepheres’s tomb complex stand out today. One -

Pacific K-Series Press Brake Catalog 0.Pdf
r Rugged, Fast & Preeis€ - t, Hydraulie Press B.rakes i: ',t ]l .,i] ll lt, .i ll :'li a:aa :i tl .l :, ;: :a :: :. t: ii 1l i: ,. ..:il a, aa .l .; ftgl lt fF.l @ ia ,a :i nre L i: ,al, t: a. .i .t la a: a: :.a' : :i . :i.l / 1- -i \ ;: li l il I ii ! d i ::all li.--- PaCifiC Pioneers in Hydraullc Press & shear Mabhine Tools Pacific Press & Shear Inc. introduced the first accurate and dependable hydraulic press brake more than 50 years ago. Today, Pacific is recognized as the leader in hydraulic technology. At Pacific, it is a dedicated task to challenge the out-dated concepts of the industry. As a result, the press brake you buy from Pacific is a modern, thoroughly tested and proven, sophisticated machine embodying all the advanced engineering and construction skills that can be designed into the product, Ou"r. the years, Pacific customers have been using, testing and devising new applications with these versatile machines. We have utilized these many years of on-the-job experience and pass this knowledge on to our customers with each new press, This is your assurance that every Pacific press brake is a multiple function machine tool! |.r e EEI i! I I ll ii :,e I I t t (Shown with optional ram mounted palm buttons.) Choosing Your Hydraulic Press Brake TneaOOitionof aPACIFIC@HydraulicK-SeriesPressBraketoyourshopbringsanewdimensiontoyouroperation. Toalarge shop,aPAClFlC@meansgreateraccuracyanddependableproduction. Toasmallshop,aPACIFlC@opensthedoortoawider range of capability and new business oppodunities. Tn"r" are a number of factors which should be considered in selecting the press brake best suited to your present and future requirements. -
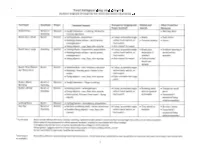
Tool Safeguarding and Controls'
Tool Safeguarding and Controls’ (Guidance originally developed by Yale University/Issued with permission) Tool Type Size/Style Power Potential Hazards Emergency Stopping and Shields and Other Protective Power Controls2 Guards Measures Arbor Press Bench or Manual • Caught between — crushing, limited by • Warning label Standing manual operation Band Saw / Small Bench Electric • Cutting blade —lacerations • E-stop, accessible single • Blade • Push sticks • Rotating blade pulleys — pinch points, action hand switch, or • Covered pulleys • Fence entanglement foot switch • Flying objects — eye, face, skin injuries • Anti-restart for wood Band Saw / Large Standing Electric • Cutting blade — lacerations, amputation • E-stop, accessible single • Blade plus • Smallest opening in • Rotating blade pulleys — pinch points, action hand switch, or extension if work surface entanglement foot switch needed possible . Flying objects — eye, face, skin injuries • Anti-restart for wood • Fully encased band saw wheels Bead / Shot Blaster Bench Electric • Abrasive shot — skin irritation, abrasion • E-stop, accessible single (w/ Glove box) • Rotating / moving parts —blade in fan action hand switch, or motor foot switch . Flying objects — eye, face, skin injuries • Door interlocks for large units Brake, Metal Bench or Manual • Caught between —finger crushing Bending Standing Buffer, Wheel Bench or Electric • Rotating parts — entanglement • E-stop, accessible single • Rotating shaft • Clamps for small Standing • Flying objects — eye, face, skin injuries action hand -
D-Constructed Tool Glossary
UNIVERSITY OF BRITISH COLUMBIA D-CONSTRUCTED TOOL GLOSSARY MATERIALS • TOOLS • PROCESSES A 21 POLAR 23 ADDITIVE MANUFACT. 66 PROFILE SCANNER C R 18 CARTESIAN 59 ROTOMOLDING 43 CNC LATHE 44 CNC MILL S 53 CNC PRESS BRAKE 20 SCARA 54 CNC PUNCH PRESS 38 STEREOLITHOGRAPHY 55 CNC ROLLER APPARATUS (S.L.A.) 45 CNC ROUTER 25 SUBTRACTIVE MANUFACT. 56 CNC TUBE BENDER 37 SELECTIVE LASER MELTING 09 CONCEPTS (S.L.M.) 16 CUTTING TOOLS 58 SINGLE POINT FORMING (S.P.F.) D 67 STRUCTURED-LIGHT 19 DELTA 12 DEGREES OF FREEDOM T 14 TOOL PATH E 49 EDM V 57 VACUUM FORMING F 07 FOREWORDS W 27 FORMATIVE FABRICATION 48 WATER JET CUTTER 35 FUSED DEPOSITION 49 WIRE EDM MODELING (F.D.M.) 13 WORK ENVELOPE H # 31 HYBRIDS 10 2D 11 3D L 68 3D BODY SCAN 36 LAMINATED OBJECT 39 3D INK JET MANUFACTURING (L.O.M.) 12 6-DEGREES OF FREEDOM 63 LIDAR I 60 INJECTION MOLDER 61 INPUT K 15 KINEMATICS M 64 MOTION CAPTURE P 14 PATH 65 PHOTOGRAMMETRY 47 PLASMA CUTTER 03 GLOSSARY 48 WATER JET CUTTER 49 WIRE EDM 05 TABLE OF CONTENT 51 FORMING 07 FOREWORDS 53 CNC PRESS BRAKE 09 TERMS & CONCEPTS 54 CNC PUNCH PRESS 55 CNC ROLLER 10 2D 56 CNC TUBE BENDER 11 3D 57 VACUUM FORMING 12 6-DEGREES OF FREEDOM 58 SINGLE POINT FORMING 13 TOOLSPACE 59 ROTOMOLDING 14 TOOLPATH 60 INJECTION MOLDING 15 KINEMATICS 16 CARTESIAN 61 INPUT 17 G-CODE | CNC 18 CARTESIAN 63 LIDAR 19 DELTA 64 MOTION CAPTURE 20 SCARA 65 PHOTOGRAMMETRY 21 POLAR 66 PROFILE SCANNER 23 ADDITIVE 67 STRUCTURED-LIGHT 25 SUBTRACTIVE 68 3D BODY SCAN 27 FORMING 29 INPUT 71 ACKNOWLEDGMENTS 31 HYBRIDS 33 ADDITIVE MANUFACT. -

Machinery for Flat Glass Processing
Machinery for Flat Glass Processing best in glass processing 1. Turn Key Solutions Facts and figures: Everything from a single source including software. Customers benefit from the only company in the flat glass machine 1961 founding year industry that can comprehensively plan and develop large projects - also thanks to the widest product range in the industry. 1 strong brand 1,300 employees 2. Excellent Service 25 sites 230 million Euros turnover (2018) Investment security and the highest availability and productivity enable the large, global LiSEC service 95 % export rate network. A contact person familiar with the local language and customs is available close to you. 7 % of turnover for R&D more than 330 patents 3. Performance through software integration Integration of the production management software and the machinery control (digitalization/Industry 4.0) allows top operation and optimization of all integrated machines or whole glass factories. Reliable processes, good quality, solid profit: LiSEC solutions Our advanced solutions generate a great cost-to-benefit The benefits: provide flat glass processors around the world with security ratio throughout the entire lifecycle of your machines and and drive in a challenging environment. systems. Over 50 years of partnership, pioneering spirit and stability Investment security due to the size of our company Customers around the world can benefit from this: be they Leading technology with a high resale value For the last 50 years, we have been working hard to experienced manufacturers or newcomers to the industry; Great cost-to-benefit ratio throughout the entire system lifecycle enable you to sustainably boost the efficiency, the system from family businesses to industrial glass processors. -

With Patented Self-Locking® Performance WILA Airpower Series
NEW STANDARD PNEUMATIC TOOL HOLDERS The WILA AirPower Series With patented Self-Locking® performance WILA AirPower Series WITH PATENTED SELF-LOCKING® PERFORMANCE WILA AirPower Series Your #NEXTSTEP in press brake productivity Tool up with the With the WILA AirPower Series you can boost your press brake productivity, while using a full pneumatic WILA AirPower Series. clamping system. Thanks to our patented Self-Locking® mechanism, WILA AirPower Series Now available: the ensures superior clamping performance. Tools are complete range of clamped and unclamped extremely fast and tight, using only regular workshop air pressure of 6-8 bar WILA’s pneumatic tool – without the need for expensive pressure boosters. It’s time to grow your business with the WILA holders, top and bottom, AirPower Series. Pro and Premium. Speed up operations With patented Self-Locking® and tool changes performance Tools are clamped using a pneumatically-controlled – and maximize pair of self-adjusting wedges. When the wedges are engaged (clamped), they become an integral part productivity. of the tool. The Self-Locking principle is suitable 6-8 for clamping WILA’s New Standard top and bottom bar tools (BIU and OZU). The Premium clamping is also released pneumatically. V-Lock® A groove at the back of the tool tang is WILA used to automatically align bottom tools AirPower along X and Y axis, and to firmly clamp Series them in place. Pneumatic clamping Lean, clean and green with WILA AirPower No longer a niche, electric press brakes are becoming increasingly popular. Thanks to our Series patented Self-Locking® mechanism, electric press brakes with WILA AirPower pneumatics deliver No oil, no hydraulics a complete and powerful all-round clamping For top and bottom tooling performance. -

Water Jet Cutter: an Efficient Tool for Composite Product Development
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by National Aerospace Laboratories Institutional Repository National Conference on Scientific Achievements of SC & ST Scientists & Technologists 14–16 April 2009, National Aerospace Laboratories, Bangalore-17 Water Jet Cutter: An Efficient Tool for Composite Product Development D. Babu Rao*, D. Baskey and R.S. Rawat Advanced Composites Division, National Aerospace Laboratories, Council of Scientific and Industrial Research, Bangalore-560017, INDIA E-mail: *[email protected] ABSTRACT Water jet cutter is a powerful tool in the present engineering scenario which works on the principle of micro erosion occurring when large volume of water is forced through a nozzle of reduced cross section at high velocity (~Mach No: 3) and elevated pressure (~3000 bar). Water jet cutter was used to cut lumber by forestry engineer Dr. Norman Franz in 1950s.[1] Water jet cutting find applications in diverse industries from mining to aerospace, where it is used for cutting, shaping, carving and reaming. Water jet cutting has many advantages like no local heat generation, smaller kerf width hence less material wastage, faster and cheaper, higher accuracy, automation capability, and less burr and rough edge etc. Advanced Composites Division (ACD) is actively engaged in the development of various aircraft parts for on-going National Programmes like TEJAS, SARAS etc. For the development of composite parts the most important aspect is tooling. To develop a tool, one has to start with master model. The technology used in ACD for composite tooling is based on splash technique. To fabricate master models and moulds, we require templates such as base plates, master model check templates, mould-ribs, reference pad fixing location templates and mould check templates etc. -

Liner Pro II Router
800-231-8040 productionproducts.net Liner Pro II Router PRODUCT DESCRIPTION Automated Cutting of fiber glass insulation for duct liners Download the Liner Pro software for your existing duct software Dramatically improves material utilization and overall quality Both router cutting and water jet cutter options are available Liner Pro II Specifications High Speed accurate short fiber liner cutting machines and systems. Short Fiber cutting machine capabilities 1/2 inch thick liner: cut speed up to 1000 Inches/Per Min. 1 inch thick: cut speed up to 750 IPM 1 1/2 inch thick: cut speed up to 500 IMP 2 inch thick: cut speed up to 250 IMP Adding a Liner Pro II cutter to your shop will dramatically increase the productivity of your automatic duct liner processing while improving the appearance and quality of your lined duct. Sheets of Acoustic Duct liner fittings are downloaded through Page: 1 800-231-8040 productionproducts.net your existing duct fitting software. This dramatically improves liner utilization using your duct software’s nesting capabilities. The CNC cut parts match the metal fittings perfectly with nice clean edges. There are 2 options for cutting machine liners with the Liner Pro II -- a high speed router or high pressure water jet. Traverse speed (between parts) up to 1500 IPM regardless of cut speed One tool (bit) change required for 2†liners only Light weight rigid aluminum gantry with high speed router Heavy duty / heavy wall welded single unit square tube framing PC based PPI - PC - CNC control system ADDITIONAL INFORMATION