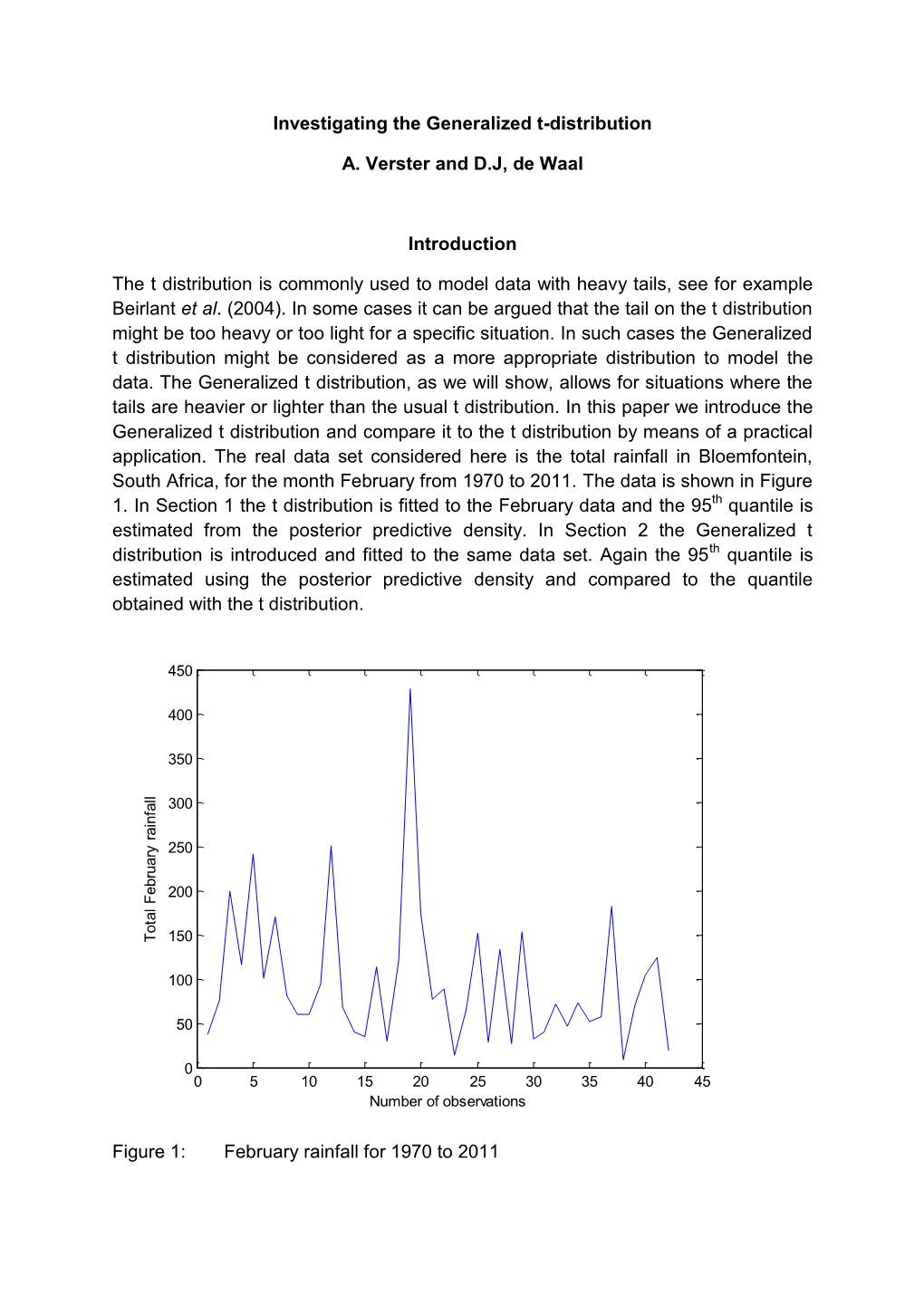
Investigating the Generalized T-Distribution
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Scale Parameter of Exponential Distribution
Review of the Air Force Academy No.2 (34)/2017 ON THE SCALE PARAMETER OF EXPONENTIAL DISTRIBUTION Anca Ileana LUPAŞ Military Technical Academy, Bucharest, Romania ([email protected]) DOI: 10.19062/1842-9238.2017.15.2.16 Abstract: Exponential distribution is one of the widely used continuous distributions in various fields for statistical applications. In this paper we study the exact and asymptotical distribution of the scale parameter for this distribution. We will also define the confidence intervals for the studied parameter as well as the fixed length confidence intervals. 1. INTRODUCTION Exponential distribution is used in various statistical applications. Therefore, we often encounter exponential distribution in applications such as: life tables, reliability studies, extreme values analysis and others. In the following paper, we focus our attention on the exact and asymptotical repartition of the exponential distribution scale parameter estimator. 2. SCALE PARAMETER ESTIMATOR OF THE EXPONENTIAL DISTRIBUTION We will consider the random variable X with the following cumulative distribution function: x F(x ; ) 1 e ( x 0 , 0) (1) where is an unknown scale parameter Using the relationships between MXXX( ) ; 22( ) ; ( ) , we obtain ()X a theoretical variation coefficient 1. This is a useful indicator, especially if MX() you have observational data which seems to be exponential and with variation coefficient of the selection closed to 1. If we consider x12, x ,... xn as a part of a population that follows an exponential distribution, then by using the maximum likelihood estimation method we obtain the following estimate n ˆ 1 xi (2) n i1 119 On the Scale Parameter of Exponential Distribution Since M ˆ , it follows that ˆ is an unbiased estimator for . -

5. the Student T Distribution
Virtual Laboratories > 4. Special Distributions > 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 5. The Student t Distribution In this section we will study a distribution that has special importance in statistics. In particular, this distribution will arise in the study of a standardized version of the sample mean when the underlying distribution is normal. The Probability Density Function Suppose that Z has the standard normal distribution, V has the chi-squared distribution with n degrees of freedom, and that Z and V are independent. Let Z T= √V/n In the following exercise, you will show that T has probability density function given by −(n +1) /2 Γ((n + 1) / 2) t2 f(t)= 1 + , t∈ℝ ( n ) √n π Γ(n / 2) 1. Show that T has the given probability density function by using the following steps. n a. Show first that the conditional distribution of T given V=v is normal with mean 0 a nd variance v . b. Use (a) to find the joint probability density function of (T,V). c. Integrate the joint probability density function in (b) with respect to v to find the probability density function of T. The distribution of T is known as the Student t distribution with n degree of freedom. The distribution is well defined for any n > 0, but in practice, only positive integer values of n are of interest. This distribution was first studied by William Gosset, who published under the pseudonym Student. In addition to supplying the proof, Exercise 1 provides a good way of thinking of the t distribution: the t distribution arises when the variance of a mean 0 normal distribution is randomized in a certain way. -

Estimation of Common Location and Scale Parameters in Nonregular Cases Ahmad Razmpour Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1982 Estimation of common location and scale parameters in nonregular cases Ahmad Razmpour Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Statistics and Probability Commons Recommended Citation Razmpour, Ahmad, "Estimation of common location and scale parameters in nonregular cases " (1982). Retrospective Theses and Dissertations. 7528. https://lib.dr.iastate.edu/rtd/7528 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. INFORMATION TO USERS This reproduction was made from a copy of a document sent to us for microfilming. While the most advanced technology has been used to photograph and reproduce this document, the quality of the reproduction is heavily dependent upon the quality of the material submitted. The following explanation of techniques is provided to help clarify markings or notations which may appear on this reproduction. 1. The sign or "target" for pages apparently lacking from the document photographed is "Missing Page(s)". If it was possible to obtain the missing page(s) or section, they are spliced into the film along with adjacent pages. This may have necessitated cutting through an image and duplicating adjacent pages to assure complete continuity. 2. When an image on the film is obliterated with a round black mark, it is an indication of either blurred copy because of movement during exposure, duplicate copy, or copyrighted materials that should not have been filmed. -

A Comparison of Unbiased and Plottingposition Estimators of L
WATER RESOURCES RESEARCH, VOL. 31, NO. 8, PAGES 2019-2025, AUGUST 1995 A comparison of unbiased and plotting-position estimators of L moments J. R. M. Hosking and J. R. Wallis IBM ResearchDivision, T. J. Watson ResearchCenter, Yorktown Heights, New York Abstract. Plotting-positionestimators of L momentsand L moment ratios have several disadvantagescompared with the "unbiased"estimators. For generaluse, the "unbiased'? estimatorsshould be preferred. Plotting-positionestimators may still be usefulfor estimatingextreme upper tail quantilesin regional frequencyanalysis. Probability-Weighted Moments and L Moments •r+l-" (--1)r • P*r,k Olk '- E p *r,!•[J!•. Probability-weightedmoments of a randomvariable X with k=0 k=0 cumulativedistribution function F( ) and quantile function It is convenient to define dimensionless versions of L mo- x( ) were definedby Greenwoodet al. [1979]to be the quan- tities ments;this is achievedby dividingthe higher-orderL moments by the scale measure h2. The L moment ratios •'r, r = 3, Mp,ra= E[XP{F(X)}r{1- F(X)} s] 4, '", are definedby ßr-" •r/•2 ß {X(u)}PUr(1 -- U)s du. L momentratios measure the shapeof a distributionindepen- dently of its scaleof measurement.The ratios *3 ("L skew- ness")and *4 ("L kurtosis")are nowwidely used as measures Particularlyuseful specialcases are the probability-weighted of skewnessand kurtosis,respectively [e.g., Schaefer,1990; moments Pilon and Adamowski,1992; Royston,1992; Stedingeret al., 1992; Vogeland Fennessey,1993]. 12•r= M1,0, r = •01 (1 - u)rx(u) du, Estimators Given an ordered sample of size n, Xl: n • X2:n • ''' • urx(u) du. X.... there are two establishedways of estimatingthe proba- /3r--- Ml,r, 0 =f01 bility-weightedmoments and L moments of the distribution from whichthe samplewas drawn. -
Theoretical Statistics. Lecture 20
Theoretical Statistics. Lecture 20. Peter Bartlett 1. Recall: Functional delta method, differentiability in normed spaces, Hadamard derivatives. [vdV20] 2. Quantile estimates. [vdV21] 3. Contiguity. [vdV6] 1 Recall: Differentiability of functions in normed spaces Definition: φ : D E is Hadamard differentiable at θ D tangentially → ∈ to D D if 0 ⊆ φ′ : D E (linear, continuous), h D , ∃ θ 0 → ∀ ∈ 0 if t 0, ht h 0, then → k − k → φ(θ + tht) φ(θ) − φ′ (h) 0. t − θ → 2 Recall: Functional delta method Theorem: Suppose φ : D E, where D and E are normed linear spaces. → Suppose the statistic Tn : Ωn D satisfies √n(Tn θ) T for a random → − element T in D D. 0 ⊂ If φ is Hadamard differentiable at θ tangentially to D0 then ′ √n(φ(Tn) φ(θ)) φ (T ). − θ If we can extend φ′ : D E to a continuous map φ′ : D E, then 0 → → ′ √n(φ(Tn) φ(θ)) = φ (√n(Tn θ)) + oP (1). − θ − 3 Recall: Quantiles Definition: The quantile function of F is F −1 : (0, 1) R, → F −1(p) = inf x : F (x) p . { ≥ } Quantile transformation: for U uniform on (0, 1), • F −1(U) F. ∼ Probability integral transformation: for X F , F (X) is uniform on • ∼ [0,1] iff F is continuous on R. F −1 is an inverse (i.e., F −1(F (x)) = x and F (F −1(p)) = p for all x • and p) iff F is continuous and strictly increasing. 4 Empirical quantile function For a sample with distribution function F , define the empirical quantile −1 function as the quantile function Fn of the empirical distribution function Fn. -

The Asymmetric T-Copula with Individual Degrees of Freedom
The Asymmetric t-Copula with Individual Degrees of Freedom d-fine GmbH Christ Church University of Oxford A thesis submitted for the degree of MSc in Mathematical Finance Michaelmas 2012 Abstract This thesis investigates asymmetric dependence structures of multivariate asset returns. Evidence of such asymmetry for equity returns has been reported in the literature. In order to model the dependence structure, a new t-copula approach is proposed called the skewed t-copula with individ- ual degrees of freedom (SID t-copula). This copula provides the flexibility to assign an individual degree-of-freedom parameter and an individual skewness parameter to each asset in a multivariate setting. Applying this approach to GARCH residuals of bivariate equity index return data and using maximum likelihood estimation, we find significant asymmetry. By means of the Akaike information criterion, it is demonstrated that the SID t-copula provides the best model for the market data compared to other copula approaches without explicit asymmetry parameters. In addition, it yields a better fit than the conventional skewed t-copula with a single degree-of-freedom parameter. In a model impact study, we analyse the errors which can occur when mod- elling asymmetric multivariate SID-t returns with the symmetric multi- variate Gauss or standard t-distribution. The comparison is done in terms of the risk measures value-at-risk and expected shortfall. We find large deviations between the modelled and the true VaR/ES of a spread posi- tion composed of asymmetrically distributed risk factors. Going from the bivariate case to a larger number of risk factors, the model errors increase. -

A Tail Quantile Approximation Formula for the Student T and the Symmetric Generalized Hyperbolic Distribution
A Service of Leibniz-Informationszentrum econstor Wirtschaft Leibniz Information Centre Make Your Publications Visible. zbw for Economics Schlüter, Stephan; Fischer, Matthias J. Working Paper A tail quantile approximation formula for the student t and the symmetric generalized hyperbolic distribution IWQW Discussion Papers, No. 05/2009 Provided in Cooperation with: Friedrich-Alexander University Erlangen-Nuremberg, Institute for Economics Suggested Citation: Schlüter, Stephan; Fischer, Matthias J. (2009) : A tail quantile approximation formula for the student t and the symmetric generalized hyperbolic distribution, IWQW Discussion Papers, No. 05/2009, Friedrich-Alexander-Universität Erlangen-Nürnberg, Institut für Wirtschaftspolitik und Quantitative Wirtschaftsforschung (IWQW), Nürnberg This Version is available at: http://hdl.handle.net/10419/29554 Standard-Nutzungsbedingungen: Terms of use: Die Dokumente auf EconStor dürfen zu eigenen wissenschaftlichen Documents in EconStor may be saved and copied for your Zwecken und zum Privatgebrauch gespeichert und kopiert werden. personal and scholarly purposes. Sie dürfen die Dokumente nicht für öffentliche oder kommerzielle You are not to copy documents for public or commercial Zwecke vervielfältigen, öffentlich ausstellen, öffentlich zugänglich purposes, to exhibit the documents publicly, to make them machen, vertreiben oder anderweitig nutzen. publicly available on the internet, or to distribute or otherwise use the documents in public. Sofern die Verfasser die Dokumente unter Open-Content-Lizenzen (insbesondere CC-Lizenzen) zur Verfügung gestellt haben sollten, If the documents have been made available under an Open gelten abweichend von diesen Nutzungsbedingungen die in der dort Content Licence (especially Creative Commons Licences), you genannten Lizenz gewährten Nutzungsrechte. may exercise further usage rights as specified in the indicated licence. www.econstor.eu IWQW Institut für Wirtschaftspolitik und Quantitative Wirtschaftsforschung Diskussionspapier Discussion Papers No. -

Stat 5102 Lecture Slides: Deck 1 Empirical Distributions, Exact Sampling Distributions, Asymptotic Sampling Distributions
Stat 5102 Lecture Slides: Deck 1 Empirical Distributions, Exact Sampling Distributions, Asymptotic Sampling Distributions Charles J. Geyer School of Statistics University of Minnesota 1 Empirical Distributions The empirical distribution associated with a vector of numbers x = (x1; : : : ; xn) is the probability distribution with expectation operator n 1 X Enfg(X)g = g(xi) n i=1 This is the same distribution that arises in finite population sam- pling. Suppose we have a population of size n whose members have values x1, :::, xn of a particular measurement. The value of that measurement for a randomly drawn individual from this population has a probability distribution that is this empirical distribution. 2 The Mean of the Empirical Distribution In the special case where g(x) = x, we get the mean of the empirical distribution n 1 X En(X) = xi n i=1 which is more commonly denotedx ¯n. Those with previous exposure to statistics will recognize this as the formula of the population mean, if x1, :::, xn is considered a finite population from which we sample, or as the formula of the sample mean, if x1, :::, xn is considered a sample from a specified population. 3 The Variance of the Empirical Distribution The variance of any distribution is the expected squared deviation from the mean of that same distribution. The variance of the empirical distribution is n 2o varn(X) = En [X − En(X)] n 2o = En [X − x¯n] n 1 X 2 = (xi − x¯n) n i=1 The only oddity is the use of the notationx ¯n rather than µ for the mean. -

A Family of Skew-Normal Distributions for Modeling Proportions and Rates with Zeros/Ones Excess
S S symmetry Article A Family of Skew-Normal Distributions for Modeling Proportions and Rates with Zeros/Ones Excess Guillermo Martínez-Flórez 1, Víctor Leiva 2,* , Emilio Gómez-Déniz 3 and Carolina Marchant 4 1 Departamento de Matemáticas y Estadística, Facultad de Ciencias Básicas, Universidad de Córdoba, Montería 14014, Colombia; [email protected] 2 Escuela de Ingeniería Industrial, Pontificia Universidad Católica de Valparaíso, 2362807 Valparaíso, Chile 3 Facultad de Economía, Empresa y Turismo, Universidad de Las Palmas de Gran Canaria and TIDES Institute, 35001 Canarias, Spain; [email protected] 4 Facultad de Ciencias Básicas, Universidad Católica del Maule, 3466706 Talca, Chile; [email protected] * Correspondence: [email protected] or [email protected] Received: 30 June 2020; Accepted: 19 August 2020; Published: 1 September 2020 Abstract: In this paper, we consider skew-normal distributions for constructing new a distribution which allows us to model proportions and rates with zero/one inflation as an alternative to the inflated beta distributions. The new distribution is a mixture between a Bernoulli distribution for explaining the zero/one excess and a censored skew-normal distribution for the continuous variable. The maximum likelihood method is used for parameter estimation. Observed and expected Fisher information matrices are derived to conduct likelihood-based inference in this new type skew-normal distribution. Given the flexibility of the new distributions, we are able to show, in real data scenarios, the good performance of our proposal. Keywords: beta distribution; centered skew-normal distribution; maximum-likelihood methods; Monte Carlo simulations; proportions; R software; rates; zero/one inflated data 1. -

Generalized Inferences for the Common Scale Parameter of Several Pareto Populations∗
InternationalInternational JournalJournal of of Statistics Statistics and and Management Management System System Vol.Vol. 4 No. 12 (January-June,(July-December, 2019) 2019) International Journal of Statistics and Management System, 2010, Vol. 5, No. 1–2, pp. 118–126. c 2010 Serials Publications Generalized inferences for the common scale parameter of several Pareto populations∗ Sumith Gunasekera†and Malwane M. A. Ananda‡ Received: 13th August 2018 Revised: 24th December 2018 Accepted: 10th March 2019 Abstract A problem of interest in this article is statistical inferences concerning the com- mon scale parameter of several Pareto distributions. Using the generalized p-value approach, exact confidence intervals and the exact tests for testing the common scale parameter are given. Examples are given in order to illustrate our procedures. A limited simulation study is given to demonstrate the performance of the proposed procedures. 1 Introduction In this paper, we consider k (k ≥ 2) independent Pareto distributions with an unknown common scale parameter θ (sometimes referred to as the “location pa- rameter” and also as the “truncation parameter”) and unknown possibly unequal shape parameters αi’s (i = 1, 2, ..., k). Using the generalized variable approach (Tsui and Weer- ahandi [8]), we construct an exact test for testing θ. Furthermore, using the generalized confidence interval (Weerahandi [11]), we construct an exact confidence interval for θ as well. A limited simulation study was carried out to compare the performance of these gen- eralized procedures with the approximate procedures based on the large sample method as well as with the other test procedures based on the combination of p-values. -
A Bayesian Hierarchical Spatial Copula Model: an Application to Extreme Temperatures in Extremadura (Spain)
atmosphere Article A Bayesian Hierarchical Spatial Copula Model: An Application to Extreme Temperatures in Extremadura (Spain) J. Agustín García 1,† , Mario M. Pizarro 2,*,† , F. Javier Acero 1,† and M. Isabel Parra 2,† 1 Departamento de Física, Universidad de Extremadura, Avenida de Elvas, 06006 Badajoz, Spain; [email protected] (J.A.G.); [email protected] (F.J.A.) 2 Departamento de Matemáticas, Universidad de Extremadura, Avenida de Elvas, 06006 Badajoz, Spain; [email protected] * Correspondence: [email protected] † These authors contributed equally to this work. Abstract: A Bayesian hierarchical framework with a Gaussian copula and a generalized extreme value (GEV) marginal distribution is proposed for the description of spatial dependencies in data. This spatial copula model was applied to extreme summer temperatures over the Extremadura Region, in the southwest of Spain, during the period 1980–2015, and compared with the spatial noncopula model. The Bayesian hierarchical model was implemented with a Monte Carlo Markov Chain (MCMC) method that allows the distribution of the model’s parameters to be estimated. The results show the GEV distribution’s shape parameter to take constant negative values, the location parameter to be altitude dependent, and the scale parameter values to be concentrated around the same value throughout the region. Further, the spatial copula model chosen presents lower deviance information criterion (DIC) values when spatial distributions are assumed for the GEV distribution’s Citation: García, J.A.; Pizarro, M.M.; location and scale parameters than when the scale parameter is taken to be constant over the region. Acero, F.J.; Parra, M.I. A Bayesian Hierarchical Spatial Copula Model: Keywords: Bayesian hierarchical model; extreme temperature; Gaussian copula; generalized extreme An Application to Extreme value distribution Temperatures in Extremadura (Spain). -
Depth, Outlyingness, Quantile, and Rank Functions in Multivariate & Other Data Settings Eserved@D = *@Let@Token
DEPTH, OUTLYINGNESS, QUANTILE, AND RANK FUNCTIONS – CONCEPTS, PERSPECTIVES, CHALLENGES Depth, Outlyingness, Quantile, and Rank Functions in Multivariate & Other Data Settings Robert Serfling1 Serfling & Thompson Statistical Consulting and Tutoring ASA Alabama-Mississippi Chapter Mini-Conference University of Mississippi, Oxford April 5, 2019 1 www.utdallas.edu/∼serfling DEPTH, OUTLYINGNESS, QUANTILE, AND RANK FUNCTIONS – CONCEPTS, PERSPECTIVES, CHALLENGES “Don’t walk in front of me, I may not follow. Don’t walk behind me, I may not lead. Just walk beside me and be my friend.” – Albert Camus DEPTH, OUTLYINGNESS, QUANTILE, AND RANK FUNCTIONS – CONCEPTS, PERSPECTIVES, CHALLENGES OUTLINE Depth, Outlyingness, Quantile, and Rank Functions on Rd Depth Functions on Arbitrary Data Space X Depth Functions on Arbitrary Parameter Space Θ Concluding Remarks DEPTH, OUTLYINGNESS, QUANTILE, AND RANK FUNCTIONS – CONCEPTS, PERSPECTIVES, CHALLENGES d DEPTH, OUTLYINGNESS, QUANTILE, AND RANK FUNCTIONS ON R PRELIMINARY PERSPECTIVES Depth functions are a nonparametric approach I The setting is nonparametric data analysis. No parametric or semiparametric model is assumed or invoked. I We exhibit the geometric structure of a data set in terms of a center, quantile levels, measures of outlyingness for each point, and identification of outliers or outlier regions. I Such data description is developed in terms of a depth function that measures centrality from a global viewpoint and yields center-outward ordering of data points. I This differs from the density function,