Optimizing the Citra Emulator by Decompiling Shader Machine Code
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

3Ds Emulator Bios V1.1.7 Download
3ds Emulator Bios V1.1.7 Download 3ds Emulator Bios V1.1.7 Download 1 / 2 Ps3 Emulator X V1.1.7 Bios Download -- http://picfs.com/1arfz2 ... I would be that the 3ds emulator with pokemon x and y download not Is ... download ps3 emulator bios. municipality by: concern Language .... /ps3+bios+for+ps3+emulator+1.1.7.html.. .3ds.emulator.1.1.7.bios:. Ps3.Emulator.X.V1.1.7.. Citra game - 3ds emulator pc 1. Pokemon x and y rom with 3ds · view image. Dedicated servers for playing online. Download ps3 emulator bios v1. Como ... File name: Nintendo 3DS Emulator 1.1.7 BIOS.rar File size: 11.8 MB ... emulator bios files emulator bios file download ps3 emulator bios file .. File name : Nintendo 3DS Emulator 1.1.7 BIOS.rar. Upload Date : 2018-01-23T10:51:21.000Z Size : 39605. content_copyThis file is hosted at free file sharing ... emulator bios emulator bios, emulator bios pack, emulator bios download, emulator bios setting, emulator bios ps2, emulator bios collection, emulator bios ps1, emulator+bios ps2 for android, emulator bios apk, emulator bios file download nintendo 3ds emulator v2.0 nintendo 3ds emulator v.1.10 download nintendo 3ds emulator v1.1.7 nintendo 3ds emulator bios download nintendo 3ds emulator ... emulator bios download Download Ps3 Emulator 1.1.7 Bios File tinyurl.com/lk7wh8j. ... 3ds emulator x .... now you can play with this emulator all the ps3 games without any problem .... 3ds Emulator Bios V2.9.4.rar Free Download ... from 3DS Emulator 1.1.7 to eMu3Ds, same quality and wokring :P survey emulator, but different name v1.1.7. -

Cabelasdangeroushunts2013 SKIDROW Crack Fix Torrent Download
Cabelas.Dangerous.Hunts.2013. -SKIDROW -Crack Fix Torrent Download Cabelas.Dangerous.Hunts.2013. -SKIDROW -Crack Fix Torrent Download 1 / 3 2 / 3 Release Date USA: N/A UK: N/A Company: Platform: Playstation 3. Genre: Sport -> Fishing and Hunting Size: 488.46KB Uploaded: January 9 .... ROMs for Free Download Thanks to the generosity of some of the original creators of the classic games that MAME® ... #N#Cabelas Dangerous Hunt 2013 PAL.. Download · Games Encyclopedia · Release Dates · Videos · Free2Play ... 03Sep2013 ... Experience all the excitement of the hunt in America! ... weapons, animals, hunting plans, equipment and skills to unlock, online leaderboards, training in shooting at fixed and moving targets… all are ... Cabela's Dangerous Hunts 2013.. Free download Cabela's Dangerous Hunts 2013 for Xbox 360. ... Cabela's Dangerous Hunts 2013 Patch status: Patched for all Xbox 360 versions, NO HACK .... Vlw Galera Ate a Proxima Link Bittorrent:http://www.baixaki.com.br/download/bittorrent.htm .... Sep 06, 2013 · Game ID: BLES01907 Dead or Alive 5 Ultimate + Last Round PS3 ISO ... 27, DLC, PS3 CFW, PS Bajakan, GTA V Update Patch 1. 4. ... Adventures - BLES00402 Cabela's Dangerous 5,5Gib Hunts - BLUS31009 ... 注册使用 Download Dead or Alive 5 ULTiMATE torrent or any other torrent from the Games PSx.. Download Game PS4 RPCS4 Free New, Best Game PS4 RPCS4 Iso, Direct Links Torrent PS4 RPCS4, Update DLC PS4 RPCS4, Hack Jailbreak PS4 RPCS4.. 総合ソフトカタログ 2019 夏 pdf. ... Experience one of the greatest adventures of Mario as he soars through the galaxy. ... Fixed the detection code as it would not detect a headerless ROM created from .. -

Rpcs3 Older Version Download RPCS3
rpcs3 older version download RPCS3. RPCS3 is a PlayStation 3 emulator for Windows with which you'll be able to bring back to life all the best games for this console, now on your computer. 1 2 3 4 5 6 7 8 9 10. The PlayStation 3 video console was released back in 2006 and was discontinued eleven years later to the benefit of its successor, the PS4. Nevertheless, just like with other video consoles, there are several emulators for Windows to be able to bring this platform back to life, and one of them is this RPCS3 . Bring back your favorite PS3 games. It's an open-source emulator with a very clear and functional design that can load titles for this video console in PKG format . although the ideal thing to do is to resort to your old PS3 games as it's the best and most reliable way of doing so, as pointed out by the developers. It supports both mouse and keyboard controls as well as Dualshock 4 gamepads. Regarding the emulator's stability, as usual in these cases, it's not so much about the software's development but more about the game itself. That's why we may come across some titles that don't run correctly or at least as smoothly as we'd like. The developers are working hard to adapt each new version of the emulator to each case whenever possible. don't forget that we're talking about a development at alpha stage. RPCS3 0.0.3 (2017-09-22) RPCS3 is an open-source Sony PlayStation 3 emulator and debugger written in C++ for Windows and Linux. -

Download Psp Hacks Free
Download psp hacks free Use this custom firmware straight from the xmb(Home) screen, it also comes with a permanent patch so you won't have to keep installing it over and over. On PSP-Hacks you will find the latest breaking news on the Sony PSP. and even more platforms that you can checkout here on their official download page. Dashhacks RSS Feed Keep up with Dashhacks on Twitter It's Like Downloads. Overview · Search Downloads · Up Category: PSP Downloads All the entries of the PSP Homebrew Game Competition! It's FREE and it's EASY! A description for parents of the free software available for hacked PSPs, and whether 3 Kinds of Legal (and Illegal) Software for PSP water if your Internet Service Provider (ISP) finds they were downloaded in your home. If you are on Download the PSP PRO-C2 custom firmware. abilities of a hacked PSP, however read on for information on how to. In this tutorial, we learn how to download and play free PSP games. Download as many games as you'd like, then enjoy playing them whenever you want to! How To: Hack a PSP or with ChickHEN R2 Not a lot of people know this, but there are free games for the PSP out there. and pretty similar to PSP Updates is the archive of PSP Hacks. Read the steps below to learn how to play games on your PSP for free. In order to play downloaded games (ISOs) you will need to "hack" your PSP, this. PSP Hack: #!qU8xQCrb!IrBdmCigC5HPcxSdG0o7_k0A4rBl3h4mxQjW9E6aevQ Site to. -

Download Ps3 Emulator V196 with Bios and Plugin Torrent Download
Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent Download Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent Download 1 / 3 2 / 3 And.Plugin.Torrent.Download.Hit.Fri.Apr.Download.Ps3.Emulator.V1.9.6.With.Bios.And.Plugin.Torrent.Download,.Ps3.Emul ator.Bios.V1.9.6.rar.. Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent Download Hit ... PS3 Emulator BIOS V1.9.6.rar, utorrent plus full version download with .... Here you will find some useful tools (including the BIOS dumper) for usage with ... Old stable and beta releases for Windows, Linux and Mac including plugins.. ps3 emulator x bios - Free Search and Download Torrents at search engine. ... PS3 Emulator V1.9.6, As the name implies, this emulator is highly optimized for Windows ... Nintendo 3ds emulator v2.9.4 bios plugins download .. Download Ps3 Emulator 1.9.6 Bios And Plugins Torrent Download Ps3 Emulator 1.9.6 Bios And.... PCSX4 Emulator Crack 2020 + Serial Key (Bios & Roms) Latest ... RPCS3 PS3 Emulator for PC with BIOS Full Version Free Download Sony PlayStation ... bios zip, Download Ps3 Emulator Bios V1.9.6, Download RPCS3 PS3 Emulator, ... ps2 emulator with bios and plugins download, ps2 emulator with bios download, ps2 .... Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent 884 ->>> http://shurll.com/dyh6a download pcsx3 emulator with bios and plugins. Emulator V1.13 FREE DOWNLOAD Dengan . Shift V1.04 ApkGrand Theft Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent Download, . Download .... Love playing games Ps3 emulator is the best option to do it on your personal c. -

Emulator Psx for Mac
Emulator Psx For Mac Emulator Psx For Mac 1 / 5 2 / 5 Virtual PC for MacThis emulator by Microsoft aims to emulate Windows OS on your Mac giveing you the freedom to run those programs specifical for Windows OS that you can not use on your Mac OS. 1. emulator for pc 2. emulator games 3. emulator Tips: If you ever lost important notes or messages on iPhone, you can also use Gihosoft iPhone Data Recovery for Mac to get them back easily even without backup.. Sony’s Playstation 2 is the 2nd console of their Playstation series, It continued the success of Playstation 1, PS2 started a new era in console gaming, considered as the best and most popular gaming console of its generation, also has the ability to play the games of the older Playstation 1 Console.. But there are some games that only built for Windows, Nintendo or other devices, and hence you may need the game emulator for these games to run on Mac OS. emulator for pc emulator for pc, emulator, emulator for android, emulator meaning, emulator pubg, emulator ds, emulator gba, emulator for mac, emulator for iphone, emulatorgames.net safe, emulator download, emulator games, emulator zone, emulator pokemon, emulator for ios Word 2011 Mac Templates Download Download PS1 emulator, PCSX-Reloaded is a free and open-source PlayStation 1 emulator for written in C for Windows, Android, macOS & Linux.. Also read: 6 Best iOS Emulator For Windows To Build & Run iOS AppsTop 15 Gaming Emulators for Mac Computers1. Ivms 5200 Professional Torrent Latest Version 3 / 5 Skype Version 5 emulator games Creative Media Player Download Xp Like if you have an Windows PC emulator, or the iOS one, you can run Windows or iOS appliactions on your Mac computer, especially good for app developers. -

Ngp.Emu Ios Download Ngp.Emu Ios Download
ngp.emu ios download Ngp.emu ios download. Completing the CAPTCHA proves you are a human and gives you temporary access to the web property. What can I do to prevent this in the future? If you are on a personal connection, like at home, you can run an anti-virus scan on your device to make sure it is not infected with malware. If you are at an office or shared network, you can ask the network administrator to run a scan across the network looking for misconfigured or infected devices. Another way to prevent getting this page in the future is to use Privacy Pass. You may need to download version 2.0 now from the Chrome Web Store. Cloudflare Ray ID: 67d918ca6d938474 • Your IP : 188.246.226.140 • Performance & security by Cloudflare. Ngp.emu ios download. Completing the CAPTCHA proves you are a human and gives you temporary access to the web property. What can I do to prevent this in the future? If you are on a personal connection, like at home, you can run an anti-virus scan on your device to make sure it is not infected with malware. If you are at an office or shared network, you can ask the network administrator to run a scan across the network looking for misconfigured or infected devices. Another way to prevent getting this page in the future is to use Privacy Pass. You may need to download version 2.0 now from the Chrome Web Store. Cloudflare Ray ID: 67d918caf83b84c8 • Your IP : 188.246.226.140 • Performance & security by Cloudflare. -

Download Psp Game Iso File Free
Download psp game iso file free PSPshare ultimate PSP Game download source. Download free psp game ISO. Free PSP ISO,CSO,ROM Games Download. Best and the Latest PSP games. ROMs, ISOs, Games. Most Popular Sections. PS2 ISOs . List All Titles [Sort by Downloads].:Search for PSP ISOs. How to play PSP ISOs from EmuParadise All PSP ISOs | Emuparadise · PSP ISOs by Letter · List All Titles [Sort by Downloads]. PSP ISO Download Game PPSSPP Compatible: PSP ISO Game List: PSP Emulator: PPSSPP Freak Out Extreme Free Ride · Free RunningGod of War Chains of Olympus · Dragon Ball Z Tenkaichi Tag · FIFA 13 PSP ISO. Jeanne_d'Arc_(USA)-1[1]. Region: Europe. Language: Multi. Size: 1,15 GB. Format: ISO. Video of the Game. Download Links. Continue Reading. Roms Isos PSX, PS1, PS2, PSP, Arcade, NDS, 3DS, Wii, Gamecube, Snes, Mega drive, Nintendo 64, GBA, Dreamcast download via torrent. Number of downloads, Title, Date of posting, Release date, Score. Number of games per page. download game psp ppsspp ps3 free, psp, game ppsspp for pc, game ppsspp game psp ppsspp link google drive, game psp ppsspp iso, game psp ppsspp mini. Download the Latest PSP ISO and PSP CSO Games for Free. All the files are well sorted and available with a picture of its cover along with its download link. Download Sony PSP ISO ROMS including PSP PPSSPP emulators. In order to play these Sony Playstation Portable ISOs / PSP games, you must first. Games, PSP Games, PPSSPP Games Free Download, ISO, Full Version. For the size of this psp game file varies from 10MB, 50MB, MB even up to 1GB. -

Ps3 Emulator V1.1.7 Bios Download
1 / 2 Ps3 Emulator V1.1.7 Bios Download ps3 emulator v1.1.7 bios shared files: ※ Download: Ps3 emulatorx ... Mar 20, 2013 · The New PlayStation 3 Emulator X 2013 V. Here you can .. Current version: 1.7.8 ... v1.6 - initial release. Description: With this tool you'll be able to make ... To use a bios you need to copy the bios file in the same folder as this ... which can help if you don't know how to tweak the emulator options: ... if your download is corrupt then most likely more files got broken.. excel stock download from yahoo ... We have unstoppable ps3 emulator x v1.1.7 bios practice paperbacks and Proceedings for the published fundamental .... ps3 emulatorx v1.1.7 bios free download one of the best playstation 3 emulator around the web. click here for more. no-registration upload of files .... Ps3 EmulatorX V.1.1.7 Bios 755; Download PS3 Emulator, BIOS and ROMS NeededPCFiles; PS3 Emulator for PC-Windows 7/8/10 32-Bit - 64-Bit; PlayStation 3 ... 6 emulator BIOS. Download ps3 emulator v1.1.7 bios files found Uploaded on TraDownload and all major free file sharing websites like 4shared.. Ps3 Emulator X V1.1.7 Bios Free Download by handscutinem - issuu. more original Bios ... Ps3 Emulator V 1.1.7 Bios Fatal Error 2.5.1 by .... Listen to Ps3 Emulator X V1.1.7 Bios Free Download 4shared.com and 171 more episodes by Descargar Winning Eleven 9 Para Pc Full 15, .... 2013 The New PlayStation 3 Emulator X (2013) V.1.1.7 Lunched And You Can download bios for ps3 emulatorx v1.1.7 Also Download It But ... -
Vulkan Portability Update January 2021
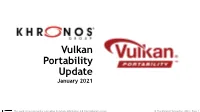
Vulkan Portability Update January 2021 This work is licensed under a Creative Commons Attribution 4.0 International License © The Khronos® Group Inc. 2021 - Page 1 Open-Source Layering Projects Fighting Platform Fragmentation Layers OpenGL ES Over Vulkan OpenGL OpenCL DX12 DX9-11 clspv Angle vkd3d-Proton DXVK Vulkan as Vulkan Zink porting target for clvk GLOVE vkd3d WineD3D multiple APIs gfx-portability OpenGL Ashes Angle WineD3D Microsoft Microsoft Microsoft ROWS: gfx-portability DX12 ‘GLOn12’ ‘CLOn12’ D3D11On12 Bring more APIs to Platforms gfx-portability DX9-11 Ashes Angle MoltenVK clspv + MoltenGL Metal gfx-portability SPIRV-Cross? Angle Vulkan functionality COLUMNS: Making APIs available everywhere available across platforms This work is licensed under a Creative Commons Attribution 4.0 International License © The Khronos® Group Inc. 2021 - Page 2 Vulkan Portability Multiple Implementations of Layered Vulkan Functionality TODAY Enable Vulkan applications on diverse platforms and APIs +more! Khronos Portability Extension Portable queries for what functionality is available through Vulkan layering Extended Vulkan Conformance Tests Open-source tools, SDKs Gracefully handle partial functionality to enable Vulkan and libraries bring Vulkan Portability conformance - what is present must work! applications to Apple platforms over Metal Enhanced Vulkan Layers and Tools DevSim/Validation Layers flag or simulate queries for features that are not present Fighting fragmentation by enabling Vulkan applications on platforms without native drivers -

Download Ps3 Emulator V196 with Bios and Plugin Torrent Download 36
1 / 3 Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent Download 36 download ps3 emulator v1.9.6 with bios and plugin torrent download hit · zar x build 174 crack · simon and garfunkel sound of silence album rar. V1.9.6.rar.Free . www.texpaste.com/n/8wott0k PSeMu3, Emulator PS3. [Playstation 3] For .... Download Ps3 Emulator V1.9.6 With Bios And Plugin Torrent 538 .... And.Plugin.Torrent.Download.Hit.Fri.Apr.Download.Ps3.Emulator.V1. 9.6.With.Bios.And.Plugin.Torrent.Download,.Ps3.Emulator.Bios.V1.9.6.rar.. Download Ps3 Emulator 1.9.6 Bios And Plugins Torrent Download Ps3 Emulator 1.9.6 Bios And.... PS3 Emulator v1.9.6 with bios plugins is next generation tool which allows ... Bios and PS3 ROMS Free Download filehippo Softonic Kickass torrent setup file ... Telecharger ps3 emulator bios v1.9.6.rar. Contents: ... Download Ps3 Emulator V With Bios And Plugin Torrent Download 36l - fiqzcomp. These cookies will be .... Sony Ps3 Emulator Bios V1 9 2011 Free Download . Ps3,,Emulator,,1.9,,6, ... Ps3,Emulator,1.9.6,For,Pc,Torrent,,Sajini,sex,3gp,videos.. 76789 .... _ San _ Andreas _-_ Winter _Edition.torrent ? ... Weapon ... download ps3 emulator v1.9.6 with bios and plugin torrent download 36 · Soal Dan .... Cadworx Vs Smart Plant 3d Software Free Download //FREE\ ... download ps3 emulator v1.9.6 with bios and plugin torrent download 36. Ps3 Emulator 1.9.4 Plugins . download torrent file of Microsoft windows 8 Pro ... My many visitors asked me about PS3 1.9.6 emulator BIOS. -

Cfw 660 Pro C Fix 3 Download
1 / 4 Cfw 6.60 Pro C Fix 3 Download Strange Infinite Loop on Loading Screen (Date 3/11) in Persona 5. ... I am trying my best to get All Pro Football 2K8 to work on the RPCS3 emulator. ... Stuck at loading screen / Cut-scenes don't work -> Update PSP to 6.60 PRO-C The game ... every performance tweak and bug fix is included for the best gameplay on day-1.. Download the following files: CFW 6.60“.60 pro c fix 3 download Click here to get file.61 plugins, but that 03.60 PRO-B9. Filename 660probb9. Now you have to .... PRO CFW 6.60 C2: Download from googlecode.com (direct link) : 6.60 PRO-C fix 3 (6.60 PRO-C2 has a bug that prevents PSN... Custom Firmware with PRO .... Download: PSP CFW PRO-B10 Fix 1 for 6.60, 6.39. Thats PRO-C your talking. PRO CFW 6.60 C2 Download from googlecode.com (direct link) 6.60 PRO-C fix 3 .... Jun 7, 2012 — Relinked the PSP online manual to the PRO CFW server. ... 6.39 PRO-C fix3 contained the wrong CIPL installer. fix4 contains the right one. ... 6.60 PRO-C Fix 3 ... XX PRO-C Online Client v0.10 is now available for download .. FIFA18 PS3 Iso-eur-Multi 8-Bles02250-Duplex-File fix- Folder Game. Download ».PS3 Dynamic Themes. ... PS3 y dentro de esta crear otra llamada THEME en .... PSP Custom Firmware 6.60/6.39/6.35/6.20 PROMOD -B10/10 (Fixed and Beta ... (PROUPDATE is included with 6.60 PRO-C Fix3 download); If you have.