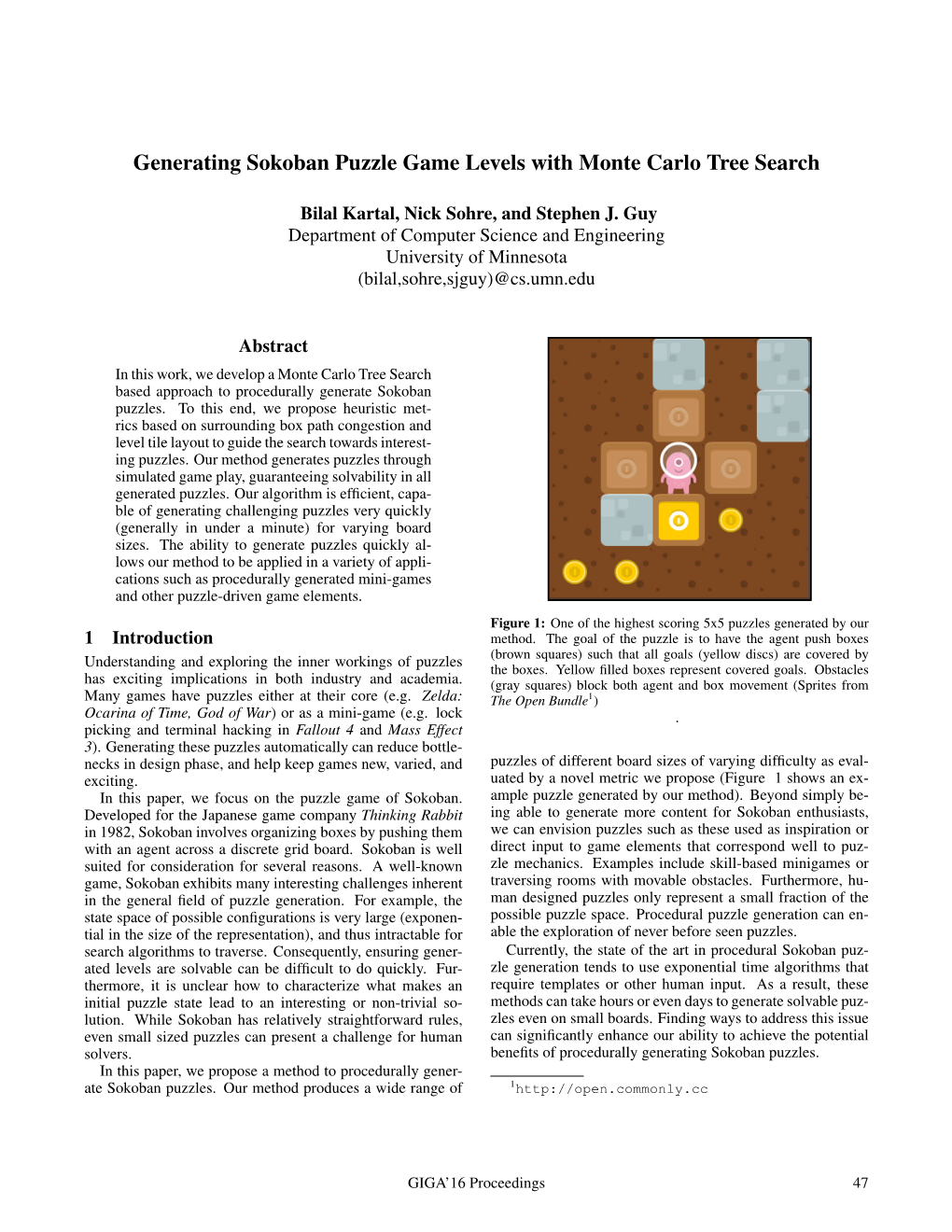
Generating Sokoban Puzzle Game Levels with Monte Carlo Tree Search
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Playing by Programming
discuss key features of these environments and their Playing by pedagogical potential, and highlight some exemplar program-to-play games. Programming: Rethinking Games and Computer Science Education Making Gameplay Video games have become nearly ubiquitous in the lives of kids growing up today. Be it addictive mobile games, a Programming sophisticated blockbuster console games, or casual on line games played through social networking sites-video Activity games are everywhere. The growth in popularity of video games has not gone unnoticed by educators and designers of educational technology. As a result, a growing number of educational designers are using video games as a con- David Weintrop text for learners to engage with new ideas and concepts. In Uri Wilensky this way, the video game medium is being used to provide meaningful learning opportunities, often with the hopes that positive play experiences will increase interest in the Video games are an oft-cited reason for young learners domain for the player. This is especially true for the field of getting intere$ted in programming and computer science. computer science, as the video games being played are As such, many learning opportunities build on themselves products of the concepts and practices that this interest by having kids program their own video are central to computer science. Thus, interest in and en- games. This approach, while sometimes successful, has joyment of video games is a frequently cited reason for why its drawbacks stemming from the fact that the challenge learners want to study computer science (Carter, 2006). of programming and game building are left distinct from Blending video games and computer science education the gamep!ay experience that initially drew learners in. -

Player–Game Interaction and Cognitive Gameplay: a Taxonomic Framework for the Core Mechanic of Videogames
informatics Article Player–Game Interaction and Cognitive Gameplay: A Taxonomic Framework for the Core Mechanic of Videogames Kamran Sedig 1,*, Paul Parsons 2 and Robert Haworth 1 1 Department of Computer Science, Western University, London, ON N6A 3K7, Canada; [email protected] 2 Department of Computer Graphics Technology, Purdue University, West Lafayette, IN 47907, USA; [email protected] * Correspondence: [email protected]; Tel.: +1-519-661-2111 (ext. 86612) Academic Editor: Antony Bryant Received: 19 December 2016; Accepted: 9 January 2017; Published: 13 January 2017 Abstract: Cognitive gameplay—the cognitive dimension of a player’s experience—emerges from the interaction between a player and a game. While its design requires careful consideration, cognitive gameplay can be designed only indirectly via the design of game components. In this paper, we focus on one such component—the core mechanic—which binds a player and game together through the performance of essential interactions. Little extant research has been aimed at developing frameworks to support the design of interactions within the core mechanic with cognitive gameplay in mind. We present a taxonomic framework named INFORM (Interaction desigN For the cORe Mechanic) to address this gap. INFORM employs twelve micro-level elements that collectively give structure to any individual interaction within the core mechanic. We characterize these elements in the context of videogames, and discuss their potential influences on cognitive gameplay. We situate these elements within a broader framework that synthesizes concepts relevant to game design. INFORM is a descriptive framework, and provides a common vocabulary and a set of concepts that designers can use to think systematically about issues related to micro-level interaction design and cognitive gameplay. -

27” 4K Ultra HD Gaming Monitor with Superclear® IPS Technology XG2700-4K
27” 4K Ultra HD Gaming Monitor with SuperClear® IPS Technology XG2700-4K The ViewSonic® XG2700-4K is a 27” 4K Ultra HD LED gaming monitor that delivers stunning definition and color for highly immersive gameplay. With 3840x2160 resolution and SuperClear IPS panel technology, this monitor provides incredibly sharp and detailed visuals. What’s more, gamers are empowered with a wide array of customizable pro-style color settings for the most accurate colors across gaming genres. This incredible alchemy of detail and color are fully realized with VESA Adaptive-Sync technology: a combination that delivers tear-free, picture-perfect gaming every time. A fast 5ms response time and low input lag also provides smooth screen performance free from blurring or ghosting. A Game Mode feature optimizes visuals for FPS, RTS and MOBA, and a black stabilization function helps target enemies lurking in the dark while maintaining rich colors and contrast. With future-proof DisplayPort and HDMI 2.0 to support 4K UHD resolution at 60Hz, this monitor is the pinnacle of detailed gaming, and maximizes the gaming potential of any PC. With unbelievable detail and color, this monitor provides everything needed for total game immersion. Stunning 4K Ultra HD Resolution Displaying more than 8 million pixels with a high pixel density, this 3840x2160 monitor delivers the ultimate in image detail and clarity for stunning, highly immersive gameplay. At 4x more pixels than Full HD resolution, this monitor provides a bigger picture of your gaming world so you can see the entire battlefield in all its glory. SuperClear IPS Panel Technology Enjoy accurate and vivid colors with consistent levels of brightness no matter the vantage point. -

Folha De Rosto ICS.Cdr
“For when established identities become outworn or unfinished ones threaten to remain incomplete, special crises compel men to wage holy wars, by the cruellest means, against those who seem to question or threaten their unsafe ideological bases.” Erik Erikson (1956), “The Problem of Ego Identity”, p. 114 “In games it’s very difficult to portray complex human relationships. Likewise, in movies you often flit between action in various scenes. That’s very difficult to do in games, as you generally play a single character: if you switch, it breaks immersion. The fact that most games are first-person shooters today makes that clear. Stories in which the player doesn’t inhabit the main character are difficult for games to handle.” Hideo Kojima Simon Parkin (2014), “Hideo Kojima: ‘Metal Gear questions US dominance of the world”, The Guardian iii AGRADECIMENTOS Por começar quero desde já agradecer o constante e imprescindível apoio, compreensão, atenção e orientação dos Professores Jean Rabot e Clara Simães, sem os quais este trabalho não teria a fruição completa e correta. Um enorme obrigado pelos meses de trabalho, reuniões, telefonemas, emails, conversas e oportunidades. Quero agradecer o apoio de família e amigos, em especial, Tia Bela, João, Teté, Ângela, Verxka, Elma, Silvana, Noëmie, Kalashnikov, Madrinha, Gaivota, Chacal, Rita, Lina, Tri, Bia, Quelinha, Fi, TS, Cinco de Sete, Daniel, Catarina, Professor Albertino, Professora Marques e Professora Abranches, tanto pelas forças de apoio moral e psicológico, pelas recomendações e conselhos de vida, e principalmente pela amizade e memórias ao longo desta batalha. Por último, mas não menos importante, quero agradecer a incessante confiança, companhia e aceitação do bom e do mau pela minha Twin, Safira, que nunca me abandonou em todo o processo desta investigação, do meu caminho académico e da conquista da vida e sonhos. -

Virtual Reality Video Game Paired with Physical Monocular Blurring As Accessible Therapy for Amblyopia
Virtual Reality Video Game Paired with Physical Monocular Blurring as Accessible Therapy for Amblyopia Ocean Hurd* Sri Kurniawan† Mircea Teodorescu‡ Electrical and Computer Computational Media Electrical and Computer Engineering Department Department Engineering Department University of California, University of California, University of California, Santa Cruz Santa Cruz Santa Cruz ABSTRACT leads to strabismus, an eye misalignment, which is more commonly This paper discusses a virtual reality (VR) therapeutic video game for known as a ”lazy-eye” [8]. treatment of the neurological eye disorder, Amblyopia. Amblyopia The traditional therapy for Amblyopia has been occlusion therapy, is often referred to as lazy eye, and it entails weaker vision in one where one wears an eye-patch over their dominant eye to force their eye due to a poor connection between the eye and the brain. Until brain to use their weak eye to strengthen the neurological connection. recently it was thought to be untreatable in adults, but new research This therapy was only expected to work on children [19]. Therefore, has proven that with consistent therapy even adults can improve children would have had to have been diagnosed at a very young their Amblyopia, especially through perceptual learning and video age, when Amblyopia is more difficult to detect. Although this games. Even so, therapy compliance remains low due to the fact that therapy was found to be low cost, easily accessible, and effective conventional therapies are perceived as either invasive, dull and/or as a permanent treatment, the compliance among Amblyopes is boring. Our game aims to make Amblyopia therapy more immersive, very low [6, 24, 27]. -

Cooperative Gameplay
San Jose State University SJSU ScholarWorks ART 108: Introduction to Games Studies Art and Art History & Design Departments Spring 5-7-2018 Essential Feature - Cooperative Gameplay Thanh Bui San Jose State University Hung Nguyen San Jose State University Follow this and additional works at: https://scholarworks.sjsu.edu/art108 Part of the Computer Sciences Commons, and the Game Design Commons Recommended Citation Thanh Bui and Hung Nguyen. "Essential Feature - Cooperative Gameplay" ART 108: Introduction to Games Studies (2018). This Final Class Paper is brought to you for free and open access by the Art and Art History & Design Departments at SJSU ScholarWorks. It has been accepted for inclusion in ART 108: Introduction to Games Studies by an authorized administrator of SJSU ScholarWorks. For more information, please contact [email protected]. Thanh Bui, Hung Nguyen May 7, 2018 Essential Feature - Cooperative Gameplay Although single player and multiplayer is very important in today game, cooperative mode is essential part of a great game. There are a lot of benefits of playing co-op mode in a game such as education and joy. From the beginning of time, human has created many forms of game for entertainment purpose. The global market for U.S. online gaming industry is approximated 1.72 trillion U.S. dollars in 2015 to 2.2 trillion U.S. dollars in 2021, according to statista.com. There are activity games, board games, television games, video games, virtual reality games, and personal computerized games, and online games. Each type of game has a population of fan playing it. In those types, online game holds the largest number of players around the world. -
Artificial General Intelligence in Games: Where Play Meets Design and User Experience
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by The IT University of Copenhagen's Repository ISSN 2186-7437 NII Shonan Meeting Report No.130 Artificial General Intelligence in Games: Where Play Meets Design and User Experience Ruck Thawonmas Julian Togelius Georgios N. Yannakakis March 18{21, 2019 National Institute of Informatics 2-1-2 Hitotsubashi, Chiyoda-Ku, Tokyo, Japan Artificial General Intelligence in Games: Where Play Meets Design and User Experience Organizers: Ruck Thawonmas (Ritsumeikan University, Japan) Julian Togelius (New York University, USA) Georgios N. Yannakakis (University of Malta, Malta) March 18{21, 2019 Plain English summary (lay summary): Arguably the grand goal of artificial intelligence (AI) research is to pro- duce machines that can solve multiple problems, not just one. Until recently, almost all research projects in the game AI field, however, have been very specific in that they focus on one particular way in which intelligence can be applied to video games. Most published work describes a particu- lar method|or a comparison of two or more methods|for performing a single task in a single game. If an AI approach is only tested on a single task for a single game, how can we argue that such a practice advances the scientific study of AI? And how can we argue that it is a useful method for a game designer or developer, who is likely working on a completely different game than the method was tested on? This Shonan meeting aims to discuss three aspects on how to generalize AI in games: how to play any games, how to model any game players, and how to generate any games, plus their potential applications. -

Into the Cosmos: Board Game Project Blending 4X and Eurogame Styles
Salvation: Into the Cosmos: Board Game Project Blending 4X and Eurogame Styles A Senior Project Presented To: the Faculty of the Liberal Arts and Engineering Studies Department California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Bachelor of Arts in Liberal Arts and Engineering Studies by Zachary Griffith June 2017 © Zachary Griffith 2017 Griffith 1 Table of Contents Introduction .................................................................................................................................................. 2 How to Play................................................................................................................................................... 3 Blending Eurogames and 4X ........................................................................................................................ 3 Eurogames ....................................................................................................................................... 3 4X Strategy ....................................................................................................................................... 4 Putting it All Together ...................................................................................................................... 4 Influences ..................................................................................................................................................... 4 The Game Design Process ........................................................................................................................... -
Beyond Hours of Video Gameplay: Connections Between Verbal Aggressiveness, Genre Preference, and Technology Used
University of Kentucky UKnowledge Communication Faculty Publications Communication 2-19-2021 Beyond Hours of Video Gameplay: Connections Between Verbal Aggressiveness, Genre Preference, and Technology Used William T. Howe University of Kentucky, [email protected] Ioana A. Cionea University of Oklahoma, [email protected] Follow this and additional works at: https://uknowledge.uky.edu/comm_facpub Part of the Communication Technology and New Media Commons, Interpersonal and Small Group Communication Commons, and the Sports Studies Commons Right click to open a feedback form in a new tab to let us know how this document benefits ou.y Repository Citation Howe, William T. and Cionea, Ioana A., "Beyond Hours of Video Gameplay: Connections Between Verbal Aggressiveness, Genre Preference, and Technology Used" (2021). Communication Faculty Publications. 21. https://uknowledge.uky.edu/comm_facpub/21 This Article is brought to you for free and open access by the Communication at UKnowledge. It has been accepted for inclusion in Communication Faculty Publications by an authorized administrator of UKnowledge. For more information, please contact [email protected]. Beyond Hours of Video Gameplay: Connections Between Verbal Aggressiveness, Genre Preference, and Technology Used Digital Object Identifier (DOI) https://doi.org/10.1016/j.chbr.2021.100063 Notes/Citation Information Published in Computers in Human Behavior Reports, v. 3. © 2021 The Author(s) This is an open access article under the CC BY license (https://creativecommons.org/licenses/by/4.0/). This article is available at UKnowledge: https://uknowledge.uky.edu/comm_facpub/21 Computers in Human Behavior Reports 3 (2021) 100063 Contents lists available at ScienceDirect Computers in Human Behavior Reports journal homepage: www.journals.elsevier.com/computers-in-human-behavior-reports Beyond hours of video gameplay: Connections between verbal aggressiveness, genre preference, and technology used William T. -

Implementation of A* Algorithm for Solving Sokoban Logic Games
Journal of Applied Intelligent System (e-ISSN : 2502-9401 | p-ISSN : 2503-0493) Vol. 4 No. 2, December 2019, pp. 104 – 111 Implementation of A* Algorithm for Solving Sokoban Logic Games Rosa Tri Setiani *1, Bonifacius Vicky Indriyono 2 School of Information and Computer Management Kadiri, Jl. Balowerti II No. 26-30 Kediri East Java,(0354-696770) E-mail : [email protected]*1, [email protected] Abstract - Sokoban is one of the puzzle category games that requires players to push boxes towards the top, bottom, left and right until the specified destination. Sometimes it takes a long time to complete a very difficult level so that a solution is needed. So that these difficulties can be overcome, we need an algorithm that can help find the right path. A * algorithm is an algorithm that minimizes the total cost of the track under the right conditions that will provide the best solution in optimal time. A * algorithm will find the distance of the fastest route to be taken by a starting point to the destination object by removing unnecessary steps. From the test results, this A * algorithm can help players in finding a solution to the road in the form of completion steps in the Sokoban game by determining the smallest F value. Keywords - Artificial Intelligence, Games, Sokoban, A * algorithm 1. INTRODUCTION The development of science and technology will never end and will grow faster along with the development of supporting technology. One of the many technologies that is growing is artificial intelligence. Artificial intelligence (AI) is the main focus in the world of research on how a computer program is able to learn and make decisions like humans. -

Video Gameplay, Personality and Academic Performance
Author's personal copy Computers & Education 58 (2012) 1260–1266 Contents lists available at SciVerse ScienceDirect Computers & Education journal homepage: www.elsevier.com/locate/compedu Video gameplay, personality and academic performance Matthew Ventura*, Valerie Shute, Yoon Jeon Kim Florida State University, 1114 W. Call St., Tallahassee, FL 32306, USA article info abstract Article history: The relationship between video gameplay, video game genre preference, personality, and GPA was Received 14 November 2011 investigated in an online correlational study with university students. In addition to administering self- Received in revised form report measures of GPA and personality, we asked three different questions regarding styles of video 29 November 2011 gameplay. The first asked the average time spent playing video games per week (habitual players), the Accepted 30 November 2011 second asked the total time spent playing favorite video games (selective players), and the third asked the number of different video games played in a year (diverse players). Students who were medium in Keywords: selective player style (spent 11–50 h) had significantly higher GPAs than students low on selective player Interdisciplinary projects – fi Lifelong learning style (spent 0 10 h). Students high on habitual playing style (7 or more hours a week) showed signi - – Media in education cantly lower levels of Conscientiousness compared to students low on habitual playing style (0 1h Multimedia/hypermedia systems a week). Students who were high on the diverse style (i.e., 7 or more games played a year) showed significantly higher Openness scores than students low on the diverse style (0–3 games a year). Finally, several notable relations were found between video game genre preference, GPA, and personality. -

Criteria for a Gameplay Profile Measure Emmanuel Guardiola, Stéphane Natkin
Player’s model: criteria for a gameplay profile measure Emmanuel Guardiola, Stéphane Natkin To cite this version: Emmanuel Guardiola, Stéphane Natkin. Player’s model: criteria for a gameplay profile measure. 9th International Conference on Entertainment Computing (ICEC), Sep 2010, Seoul, South Korea. pp.366-371, 10.1007/978-3-642-15399-0_39. hal-01059008 HAL Id: hal-01059008 https://hal.inria.fr/hal-01059008 Submitted on 29 Aug 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Player’s model: criteria for a gameplay profile measure Emmanuel Guardiola, Stephane Natkin CEDRIC /CNAM, 292 Rue Saint-Martin 75003 Paris, France [email protected], [email protected] Abstract. Game designers empirically use psychological and sociological player’s model to create the gameplay of their video games. These models are generally implicit and always informal. A formal analysis of the player’s model leads to define efficient player behavior profile. It can have numerous applications, for instance adaptation of the content to the player’s ability and interest. Our work tries to find a rational way to assess Players Styles, concept suggested by Bartle [1] in 1996.