Fluid Dynamics Code User Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Upgrades Prepare School for Year Fourth of July Celebration, Ranch
!"#"$ #$% &'"(## )*#*+!,#$-.&+!-/% #-0+%/&.,1+'- !&"2/$ 0,*+345 6,78,9%&" RANCHO SFNEWS .com VOL. 7, NO. 13 THE RANCH’S BEST SOURCE FOR LOCAL NEWS JULY 15, 2011 THISWEEK Upgrades STILL GOING The Association will prepare continue California Highway Patrol’s senior programs, where retired volunteers help their school community run more efficiently B1 for year WAY TO GO By Patty McCormac Local college students RANCHO SANTA FE — earn top honors and The new R.Roger Rowe School grades at recent will finally get comfortable commencements A3 chairs for its Performing Arts Center. The board of trustees voted unanimously at its July 7 BACK HOME meeting to fund 350 cushioned Columnist Machel Penn chairs with arm rests at a cost of Shull enjoys her Fourth no more than $28,404.38. of July weekend in Iowa Staff and administration in this week’s “Machel’s have had the opportunity to Ranch” B7 test several chairs, which have been outside the office of Superintendent Lindy Delaney for the past few months. The most popular will be pur- INSIDE chased. TWO SECTIONS, 32 PAGES Also approved for pur- chase were bookcases and Calendar . A5 READY! 6:;+#<:=>+!?<@+ABB+:C+"?D<E:+#?D>?+FG+H?>EGI+?>+>EG+J>?HKDH+?IG?+LGC:IG+>EG+J>?I>+:C+>EG+M?I?NG* Photo by Patty McCormac classroom cubbies and tables Classifieds . B12 not to exceed $15,000. Although there are no stu- Comics . B14 Fourth of July celebration, Ranch-style dents at the school during the Consumer Reports . B5 summer, planning for the next Crossword . B14 By Patty McCormac are no rules or limitations. -

John L. Grove College of Business
JOHN L. GROVE COLLEGE OF BUSINESS “A Tradition of Excellence” 2014-15 Annual Report CONTENTS Dean’s Message .................................3 COB Advisory Board ...........................4 Board Member Focus: Brad Hollinger ’76 ..........................5 Supply Chain Management Advisory Council ...........................6 Finance Advisory Council ....................6 Diller Honored .....................................7 Business Grads Receive Awards.........7 Beta Gamma Sigma ............................8 High Ranking for Online MBA ..............9 CPA Passing Rate ................................... 9 JOHN L. GROVE Student Organizations .......................10 Outstanding Young Alumna ...............11 COLLEGE OF BUSINESS First Place at IMP Competition ............. 11 Student Spotlights ............................12 he John L. Grove College of Business, The university Benjamin Shenk and Shelby Stachel established in 1971, is one of the participates in two major employment consor- premier business schools in the Mid- tia each year, and the college helps to host the Target Case Competition ...................12 T Atlantic Region. Since 1981, our college has Career Fair where students can talk to repre- Study Abroad in La Rochelle .............13 held the most prestigious international accredi- sentatives from various businesses about career Etiquette Dinner ................................13 tation by the Association to Advance Collegiate opportunities. Students have an opportunity Becker Named SIOP Fellow ..............14 Schools -
2018 FRISCO ROUGHRIDERS MEDIA GUIDE Designed, Written and Laid out by Ryan Rouillard
table of contents CLUB INFORMATION club history & records Front office directory .................................. 4-5 Year-by-year records ......................................46 Ownership &and executive bios ............... 6-8 Year-by-year statistics ...................................47 Club information ..............................................9 RoughRiders timeline ..............................48-55 Dr Pepper Ballpark ...................................10-11 Single-game team records ...........................56 Texas League All-Star Games in Frisco .......12 Single-game individual records ..................57 Broadcasters, broadcast partners ...............13 Single-season team batting records ..........58 Media information and policies ..................14 Single-season team pitching records .........59 Rangers Minor League info ....................15-17 Single-season individual batting records ......60 Single-season individual pitching records ....61 COACHES & STAFF Career batting records ..................................62 Joe Mikulik (manager) .............................20-21 Career pitching records ................................63 Greg Hibbard (pitching coach) ....................22 Notable streaks...............................................64 Jason Hart (hitting coach) ............................23 Perfect games and no-hitters ......................65 Support staff, coaching awards ...................24 Opening Day lineups .....................................66 Midseason All-Stars, Futures Game ............67 -
Responses to Committee of the Whole (COW) FY2018 – FY2019 Oversight and Performance Hearing Questions on the University of the District of Columbia
Responses to Committee of the Whole (COW) FY2018 – FY2019 Oversight and Performance Hearing Questions on the University of the District of Columbia 1. Please provide, as an attachment to your answers, a current organizational chart for your agency with the number of vacant and filled FTEs marked in each box. Include the names of all senior personnel, if applicable. Also include the effective date on the chart. See Attachment A – UDC Organizational Chart 2. Please provide, as an attachment, a Schedule A for your agency which identifies all employees by title/position, current salary, fringe benefits, and program office as of January 31, 2019. The Schedule A also should indicate all vacant positions in the agency. Please do not include Social Security numbers. See Attachment B – Schedule A 3. Please list, as of February 1, 2019, all employees detailed to or from your agency, if any, anytime this fiscal year (up to the date of your answer). For each employee identified, please provide the name of the agency the employee is detailed to or from, the reason for the detail, the date the detail began, and the employee’s actual or projected date of return. No employees of the University were detailed. 4. (a) For fiscal year 2018, please list each employee whose salary was $125,000 or more. For each employee listed provide the name, position title, salary, and amount of any overtime and/or bonus pay. Name Title Salary Special Pay Mason Jr., Ronald F. President $322,354.00 LeMaile-Stovall, Troy A. Chief Operating Officer $250,298.00 Chief Student Development and Latham, William Ulysses Success Officer $214,456.00 Summers, Tony Chief Community College Officer $214,456.00 Brittain, John C. -
Annual Report 2013 | Annual Report
Nevada Public Radio’s Annual Report 2013 | annual report vision mission Nevada Public Radio Nevada Public VIwill be recognized MIRadio will enhance as the leading the quality of life independent source of and foster civic SIinformation and SSengagement by cultural expression, informing, educating and a catalyst for and inspiring our ONcivic engagement. IONgrowing audiences. Contents 3. CEO’s Letter 8. 2013 Honor Roll of Donors 4. Chair’s Letter 40. Bids, Bites & Beverages: Event Photos 5. 2013 Board of Directors/ 50. Photo Gallery of Events Community Advisory Board 56. Thank you 6. Fiscal Year Support 7. Fiscal Year Expense 2 annual report | 2013 CEO Florence LETTER Rogers Highlights from October 1, 2012 thru September 30, 2013 Nevada Public Radio’s audience continues to grow. produce that relentlessly focuses on the issues that I’ve written that phrase many times, and each matter most to those of us who make Southern time it is an affirmation that what we do is Nevada home. We were honored to receive the meaningful to people in every walk of life who 2012 “Crystal Bookmark” award from Nevada choose our broadcast, online and magazine Humanities for our enduring attention to the content. You’ll read some of their reflections in the literary life of the region. KNPR’s State of pages ahead, and I hope their comments resonate Nevada earned its 5th Electronic Media Award, and with your experiences with Southern Nevada’s the program also won Nevada Public Radio its 9th NPR station, our classical music and city-regional “best documentary” honor in these Las Vegas awards. -

Official Conference Proceedings ISSN:2186 - 2281 the Asian Conference on Literature and Librarianship
Official Conference Proceedings ISSN:2186 - 2281 The Asian Conference on Literature and Librarianship Osaka, Japan 2014 Conference Proceedings 2014 ISSN – 2186-229X © The International Academic Forum 2014 The International Academic Forum (IAFOR) Sakae 1-16-26-201 Naka Ward, Nagoya, Aichi Japan 460-0008 ww.iafor.org acah2014 librasia2014 “To Open Minds, To Educate Intelligence, To Inform Decisions” The International Academic Forum provides new perspectives to the thought-leaders and decision-makers of today and tomorrow by offering constructive environments for dialogue and interchange at the intersections of nation, culture, and discipline. Headquartered in Nagoya, Japan, and registered as a Non-Profit Organization 一般社( 団法人) , IAFOR is an independent think tank committed to the deeper understanding of contemporary geo-political transformation, particularly in the Asia Pacific Region. INTERNATIONAL INTERCULTURAL INTERDISCIPLINARY iafor The Executive Council of the International Advisory Board IAB Chair: Professor Stuart D.B. Picken IAB Vice-Chair: Professor Jerry Platt Mr Mitsumasa Aoyama Professor June Henton Professor Baden Offord Director, The Yufuku Gallery, Tokyo, Japan Dean, College of Human Sciences, Auburn University, Professor of Cultural Studies and Human Rights & Co- USA Director of the Centre for Peace and Social Justice Professor David N Aspin Southern Cross University, Australia Professor Emeritus and Former Dean of the Faculty of Professor Michael Hudson Education, Monash University, Australia President of The Institute for -

Goodhue County Mental Health Needs Assessment
Goodhue County Mental Health Needs Assessment Capstone Paper In partial fulfillment of the Master of Urban and Regional Planning Degree Requirements The Hubert H. Humphrey School of Public Affairs The University of Minnesota Todd Austin Meaghan McSorley PeggySue Imihy Erik Thompson 14 May 2018 Tuesday, May 7th, 2019 Sunday, May 12th, 2019 Date of oral presentation Approval date of final paper Lauren Martin Mayo Clinic Health System Capstone Instructor Client Goodhue County Mental Health Needs Assessment 2019 Executive Summary This report is an addendum to Mayo Clinic Health System’s 2019 Community Health Needs Assessment (CHNA) focused on mental health and wellbeing in Goodhue County. Recommendations for improving mental health were developed based on stakeholder interviews, data and demographic analysis, and a social determinants of health framework. RESEARCH & STATISTICS Examined past CHNAs, Census Data, Mental Health Literature, and Comprehensive Plans 43% of renter and 29% of homeowners spend over 30% of their income on housing 190 suicides per 10,000 population for 10- to 19-year-olds Teen birth rate is 17% overall, but is 42% for hispanic women The population of Goodhue is 3.4% Hispanic, 1.5% Native American Nationally, farmers experience suicide TWICE as much as the general population COMMUNITY ENGAGEMENT PERSONAS Included conversations with: Information from interviews and research was synthesized into 4 fictional characters whose stories represent the needs of broad populations 10 CARE Clinic Patients in Goodhue County 5 Jordan -

Sundays Beginning January 14 at 8 Pm
HER Duty • HER Passion • HER MAJESTY Sundays beginning January 14 at 8 pm ALSO INSIDE On WFMT, we will celebrate the artistic leadership of CSO music director Riccardo Muti as he guest- conducts the 2018 New Year’s in Vienna concert, which we’ll present on the morning of New Year’s Day. Air Check The Guide Dear Member, The Member Magazine for Happy New Year! January is always an exciting month for all of us as we welcome a variety of new WTTW and WFMT Renée Crown Public Media Center programs and returning series. And this month, we celebrate an impressive milestone in Chicago 5400 North Saint Louis Avenue broadcasting history: the 40th anniversary of our Friday evening series The Week in Review, which has Chicago, Illinois 60625 been hosted by Joel Weisman since its inception in January 1978. Each week, Joel convenes a panel of journalists to break down the top stories of the week in Chicago, a format that is commonplace now Main Switchboard (773) 583-5000 but did not exist then. Join us for a one-hour special on January 19 that looks back at the series and Member and Viewer Services bids farewell to Joel as he steps down from the anchor chair after his unprecedented run. Don’t forget (773) 509-1111 x 6 that you can watch all episodes on demand at wttw.com/chicagotonight. WFMT Radio Networks (773) 279-2000 On WTTW11 this month, beat the winter blues with the second season of the popular Masterpiece Chicago Production Center series Victoria, and new seasons of The Interview Show with Mark Bazer, Antiques Roadshow, and 800 (773) 583-5000 Words; also, Check, Please! brings you a menu of new restaurants and reviewers who love them. -
Discovering the Mysteries of Ancient America Lost History and Legends
’Ancient America Lost History and Legends, Unearthed and Explored Edited by Frank Joseph With Contributions from Zechariah Sitchin, Wayne May, Andrew Collins, David Hatcher Laura Lee, and Others H Discovering the Mysteries An c i e n t America Lost History and Legends, Unearthed and Explored NOV 2007 r ' I Discovering the Mysteries 0/Ancient America Lost History and Legends, Unearthed and Explored Edited by Frank Joseph With Contributions From Zecharia Sitchin, Wayne May, Andrew Collins, David Hatcher Childress, Laura Lee, and Others New Page Books A division of The Career Press, Inc. Franklin Lakes, NJ Copyright© 2006 by Frank Joseph All rights reserved under the Pan-American and International Copyright Conventions. This book may not be reproduced, in whole or in part, in any form or by any means electronic or mechanical, including photocopying, recording, or by any information storage and retrieval system now known or hereafter invented, without written permission from the publisher. The Career Press. Discovering the Mysteries or Ancient America Edited by Gina Talucci Typeset by Kate Henches Cover design by Lu Rossman/Digi Dog Design Printed in the U.S.A. by Book-mart Press To order this title, please call toll-free 1 -800-CAREER- 1 (NJ and Canada: 201-848-0310) to order using VISA or MasterCard, or for further information on books from Career Press. €% CAREER i* PRESS The Career Press, Inc., 3 Tice Road, PO Box 687, Franklin Lakes, NJ 07417 www.careerpress.com www.newpagebooks.com Library of Congress Cataloging-in-Publication Data Discovering the mysteries of ancient America : lost history and legends, unearthed and explored / edited by Frank Joseph ; with contributions from Zechariah Sitchin .. -
Handling the Family Business
$1 Serving our communities since 1889 — www.chronline.com Festival Weekend Edition Season Saturday, Begins April 29, 2017 Without May Day / Main 3 Recovering Like Athletes ‘Act of Heroism’ Acknowledged Chronicle Staffer Tests Out Offerings of Centralia Resident With Autism Honored by RFA Pacific Sports Spa in Chehalis / Life 1 After He Alerted His Family to House Fire / Main 4 Lawmakers Timeline for Riffe Lake Projects Still Unclear Tangle Over DRAWDOWN: Boat Launch, MORTON — While locals Herrera Beutler, Mossyrock electricity-generating dams wait to learn what will become Mayor Tom Meade voiced his six decades ago, there has been Levy Rates Swimming Areas Will of Riffe Lake in the face of a growing frustration with the a contentious relationship Need Changes as Water proposed extended drawdown, relationship between Tacoma fraught with mistrust between as Special the gears of bureaucracy grind Power and East Lewis County the local and outside interests. Levels Drop away. communities. Meade noted Tacoma Pow- During a recent meeting He said that ever since the er’s evolving plan to reduce the Session By Jordan Nailon in Morton between commu- utility company set its sights Continues [email protected] nity leaders and U.S. Rep. Jaime on the Cowlitz River Valley for please see RIFFE, page Main 11 SEEKING A COMPROMISE: Rates Will Ultimately Depend on Where Handling the Family Business You Live By Graham Perednia At 24, Chehalis Man Takes Leadership Role at Mackinaw’s in Chehalis [email protected] When the state Legisla- ture finally reaches a com- promise on education fund- ing, chances are Washington residents will see changes in local levy rates. -

August Troubadour
FREE SAN DIEGO ROUBADOUR Alternative country, Americana, roots, folk, Tblues, gospel, jazz, and bluegrass music news July 2005 www.sandiegotroubadour.com Vol. 4, No. 10 what’s inside Welcome Mat ………3 Mission Statement Contributors Blues Benefit for Karen Lee Full Circle.. …………4 Vinyl Cover Art/LT Turntable Recordially, Lou Curtiss Front Porch …………6 Acoustic Music Venue Series: Dizzy’s Canyon Folk House Concerts Michael Tiernan Jane Lui Parlor Showcase …8 Cici Porter Ramblin’... …………10 Bluegrass Corner Zen of Recording Hosing Down Radio Daze Highway’s Song. …12 Sourdough Slim Of Note. ……………13 Taylor Harvey Band Beverly Heising Glowfriends Patti Zlaket Jane Lui ‘Round About ....... …14 July Music Calendar The Local Seen ……15 Photo Page JULY 2005 SAN DIEGO TROUBADOUR welcome mat Blues Musicians Rally RSAN ODUIEGBO ADOUR Alternative country, Americana, roots, folk, to Help a Friend blues, gospel, jazz, and bluegrass music news T by Liz Abbott/Photography by Steve Covault o one expects to go through life without experiencing some MISSION CONTRIBUTORS hardships along the way, which can come out of left field and To promote, encourage, and provide an N turn your life upside down. Nothing, however, could have pre - alternative voice for the great local FOUNDERS pared Karen Lee (wife of Bayou Brothers drummer Ric Lee) for the devas - music that is generally overlooked by Ellen and Lyle Duplessie tating effects of the stroke she suffered in March, leaving her paralyzed the mass media; namely the genres of Liz Abbott on one side. After the initial shock wore off and Karen was released from alternative country, Americana, roots, Kent Johnson the hospital, she began the long and difficult road to recovery, with folk, blues, gospel, jazz, and bluegrass. -
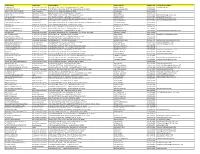
Report of Contracting Activity
Vendor Name Vendor Type Vendor Address Vendor Contact Vendor Phone Vendor E-Mail Address 100REPORTERS Professional Corporation 910 17TH ST. NW SUITE 215 WASHINGTON,DC US 20006 DIANA SCHEMO 202-683-6485 [email protected] 1164 BLADENSBURG LLC Professional Corporation 3232 GEORGIA AVENUE NW SUITE 100 WASHINGTON,DC US 20010 ADRIAN WASHINGTON 202-722-6002 1213 U STREET LLC /T/A BEN'S State Corporation 1213 U ST., NW WASHINGTON,DC US 20009 VIRGINIA ALI 202-667-0909 19TH STREET BAPTIST CHRUCH Government Entity 4606 16TH STREET, NW WASHINGTON,DC US 20011 ROBIN SMITH 202-829-2773 1SPATIAL INC. Out of State Corporation 45945 CENTER OAK PLAZA #190 STERLING,VA US 20166 MIKE MATHEWS 703-444-9488 [email protected] 1ST CDL TRAINING CTR OF NOVA Partnership 5716 TELEGRAPH ROAD ALEXANDRIA,VA US 22303 NADEEM IKRAM 703-347-7999 [email protected] 1ST CHOICE LLC Professional Corporation 1558 BUTLER STREET SE APARTMENT 201 WASHINGTON,DC US 20020 VICTOR BATTLE 202-459-1017 [email protected] 1ST NEEDS MEDICAL Sole Ownership 1411 H STREET N.E. WASHINGTON,DC US 20002 DARIUS JEFFERSON 844-417-8633 [email protected] 21ST CENTURY SECURITY, LLC Sole Ownership 1550 CATON CENTER DRIVE, #A DBA/PROSHRED SECURITY BALTIMORE,MD US 21227 C. MARTIN FISHER 410-242-9224 2228 MLK LLC Professional Corporation 11701 BOWMAN GREEN DRIVE RESTON,VA US 20190 TIMOTHY M. CHAPMAN 703-581-6111 2255 MLK LLC Professional Corporation 1805 7th Street NW 8th Floor Washington,DC US 20001 Stan Voudrie 703-606-2971 3534 EAST CAP VENTURE LLC Professional Corporation 3050 K STREET NW SUITE 125 WASHINGTON,DC US 20007 M.