A Stochastic Simulation Model for Anelosimus Studiosus During Prey Capture: a Case Study for Determination of Optimal Spacing
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

(Araneae: Theridiidae)*
SYMBIOSES BETWEEN INSECTS AND SPIDERS: AN ASSOCIATION BETWEEN LEPIDOPTERAN LARVAE AND THE SOCIAL SPIDER ANELOSIMUS EXIMIUS (ARANEAE: THERIDIIDAE)* BY MICHAEL H. ROBINSON S mithsonian Tropical Research Institute P.O. Box 2072, Balboa, Canal Zone, Panama INTRODUCTION There are many instances of relationships between insects and spiders that are not simply relationships between predators and prey. Bristowe (1941) cites numerous examples either from his own extensive experience or from a broad review of the diverse litera- ture. Moths have been reported to associate with spiders' webs both as adults and larvae. Thus Pocock (1903) reported a case of commensalism between the gregarious spider Stegodyphus sp. (Eri- sidae) and the moth Batrachedra stegodyphobius Walsingham. The unnamed species of Stegodyphus from South Africa had small lepi- dopteran larvae crawling about within the communal web. These fed upon "the carcases of the flies or other insects which, with in- finite labour and patience, the spiders hauled up as near their nest as possible Pocock states that pupation occurred within the nest (= web) and that, after emergence, adult moths moved about the web walking, leaping and fluttering. Reportedly the moths did not get caught in the sticky (cribellate)silk "being gifted apparently, like the spiders themselves, with some safeguard against the sticki- ness of the threads, which proved so fatal to other insects" (1903: 169). Brach (1977) reports that the webs of Anelosimus studiosus, in Florida are shared by a host of other arthropods including py- ralid "webworms." He comments that the relationship between these other arthropods and the Anelosimus is not clear, but that the majority "are found in the periphery of senescent webs and may be physically isolated from contact with colony members by their own silken retreats" (1977:155). -

Exploring the Relationship Between Behaviour and Neurochemistry in the Polyphenic Spider, Anelosimus Studiosus (Araneae: Theridiidae) Jennifer B
East Tennessee State University Digital Commons @ East Tennessee State University Electronic Theses and Dissertations Student Works 8-2016 Exploring the Relationship Between Behaviour and Neurochemistry in the Polyphenic Spider, Anelosimus studiosus (Araneae: Theridiidae) Jennifer B. Price East Tennessee State University Follow this and additional works at: https://dc.etsu.edu/etd Part of the Behavioral Neurobiology Commons, Behavior and Ethology Commons, Comparative and Evolutionary Physiology Commons, Molecular Biology Commons, Other Animal Sciences Commons, and the Other Ecology and Evolutionary Biology Commons Recommended Citation Price, Jennifer B., "Exploring the Relationship Between Behaviour and Neurochemistry in the Polyphenic Spider, Anelosimus studiosus (Araneae: Theridiidae)" (2016). Electronic Theses and Dissertations. Paper 3114. https://dc.etsu.edu/etd/3114 This Dissertation - Open Access is brought to you for free and open access by the Student Works at Digital Commons @ East Tennessee State University. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of Digital Commons @ East Tennessee State University. For more information, please contact [email protected]. Exploring the Relationship Between Behaviour and Neurochemistry in the Polyphenic Spider, Anelosimus studiosus (Araneae: Theridiidae) ______________________ A dissertation Presented to the faculty of the Department of Biomedical Sciences East Tennessee State University In partial fulfillment of the requirements -

Natural History Miscellany Altitudinal Patterns of Spider Sociality and the Biology of a New Midelevation Social Anelosimus Species in Ecuador
vol. 170, no. 5 the american naturalist november 2007 ൴ Natural History Miscellany Altitudinal Patterns of Spider Sociality and the Biology of a New Midelevation Social Anelosimus Species in Ecuador Leticia Avile´s,1,* Ingi Agnarsson,1,2,† Patricio A. Salazar,1,‡ Jessica Purcell,1,§ Gabriel Iturralde,3,k Eric C. Yip,4,# Kimberly S. Powers,5,** and Todd C. Bukowski5,†† 1. Department of Zoology, University of British Columbia, are one to two orders of magnitude smaller than those of a low- Vancouver, British Columbia V6T 1Z4, Canada; elevation congener of similar body size. We suggest that the absence 2. Department of Botany, University of British Columbia, of subsocial Anelosimus species in the lowland rain forest may be Vancouver, British Columbia V6T 1Z4, Canada; due to an increased probability of maternal death in this habitat due 3. Escuela de Biologı´a, Pontificia Universidad Cato´lica del to greater predation and/or precipitation, while absence of a sufficient Ecuador, Quito, Ecuador; supply of large insects at high elevations or latitudes may restrict 4. Department of Entomology, Cornell University, Ithaca, New social species to low- to midelevation tropical moist forests. We refer York 14853; to these as the “maternal survival” and “prey size” hypotheses, re- 5. Department of Ecology and Evolutionary Biology, University of spectively, and suggest that both in combination may explain the Arizona, Tucson, Arizona 85721 geographical distribution of sociality in the genus. Submitted March 7, 2007; Accepted July 2, 2007; Keywords: biogeography of sociality, elevation, latitude, social evo- Electronically published September 21, 2007 lution, social spiders, sex ratio, group foraging, Theridiidae. -

The Evolution of Sociality in Spiders
ADVANCES IN THE STUDY OF BEHAVIOR, VOL. 37 The Evolution of Sociality in Spiders { Yael Lubin* and Trine Bilde *blaustein institutes for desert research, ben‐gurion university of the negev, sede boqer campus, 84990 israel {department of biological sciences, university of aarhus, denmark I. INTRODUCING SOCIAL SPIDERS A solitary lifestyle characterizes the vast majority of almost 40,000 known species of spiders (Platnick, 2007). Thus, the occurrence of group living in spiders begs the question: what is different about these species? Group living has arisen in spiders in basically two different forms. Cooperative or ‘‘non- territorial permanent‐social’’ species (sensu Avile´s, 1997;alsoreferredtoas ‘‘quasi‐social,’’ Buskirk, 1981) are the main focus of this chapter. These species have family‐group territories consisting of communal nests and cap- ture webs, which they inhabit throughout the entire lifetime of the individual, and colony members cooperate in foraging and raising young. In many ways, these species resemble the ‘‘primitively eusocial’’ wasps and bees and the cooperative breeders in vertebrate societies, where the family forms the basic unit of sociality (Brockmann, 1997; Whitehouse and Lubin, 2005). Another form of group living in spiders has been termed colonial or communal‐ territorial (Avile´s, 1997: ‘‘territorial permanent‐social’’ species). Colonial species occur in aggregations, but individuals in the colony generally forage and feed alone and there is no maternal care beyond the egg stage; thus, they lack the cooperative behaviors described below for nonterritorial permanent‐ social species (reviewed in Uetz and Hieber, 1997; Whitehouse and Lubin, 2005). Colonial species have been likened to foraging flocks of birds (Rypstra, 1979) and are described as ‘‘foraging societies’’ by Whitehouse and Lubin (2005). -

Anthropod Community Associated with the Webs of the Subsocial Spider Anelosimus Studiosus
Georgia Southern University Digital Commons@Georgia Southern Electronic Theses and Dissertations Graduate Studies, Jack N. Averitt College of Fall 2008 Anthropod Community Associated with the Webs of the Subsocial Spider Anelosimus Studiosus Sarah Natalie Mock Follow this and additional works at: https://digitalcommons.georgiasouthern.edu/etd Recommended Citation Mock, Sarah Natalie, "Anthropod Community Associated with the Webs of the Subsocial Spider Anelosimus Studiosus" (2008). Electronic Theses and Dissertations. 702. https://digitalcommons.georgiasouthern.edu/etd/702 This thesis (open access) is brought to you for free and open access by the Graduate Studies, Jack N. Averitt College of at Digital Commons@Georgia Southern. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of Digital Commons@Georgia Southern. For more information, please contact [email protected]. THE ARTHROPOD COMMUNITY ASSOCIATED WITH THE WEBS OF THE SUBSOCIAL SPIDER ANELOSIMUS STUDIOSUS by SARAH N. MOCK (Under the Direction of Alan Harvey) ABSTRACT Anelosimus studiosus (Theridiidae) is a subsocial spider that has a diverse arthropod fauna associated with its webs. From south Georgia, I identified 1006 arthropods representing 105 species living with A. studiosus , and 40 species that were prey items from 250 webs. The arthropods seen in A. studiosus webs represented a distinct community from the arthropods on the tree. I found that Barronopsis barrowsi (Agelenidae) and Frontinella pyramitela was similar to A. studiosus in web structure and that B. barrowsi webs contained multiple arthropods. Also, previously known as asocial, B. barrowsi demonstrated sociality in having multiple adults per web. Lastly, the inquiline communities in the webs of A.studiosus and B.barronopsis contained many different feeding guilds, including herbivores, omnivores, generalist predators, kleptoparasites, and aranievores. -
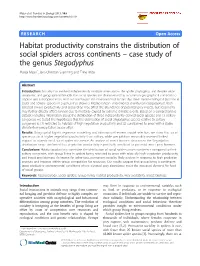
Habitat Productivity Constrains the Distribution of Social Spiders Across Continents
Majer et al. Frontiers in Zoology 2013, 10:9 http://www.frontiersinzoology.com/content/10/1/9 RESEARCH Open Access Habitat productivity constrains the distribution of social spiders across continents – case study of the genus Stegodyphus Marija Majer*, Jens-Christian Svenning and Trine Bilde Abstract Introduction: Sociality has evolved independently multiple times across the spider phylogeny, and despite wide taxonomic and geographical breadth the social species are characterized by a common geographical constrain to tropical and subtropical areas. Here we investigate the environmental factors that drive macro-ecological patterns in social and solitary species in a genus that shows a Mediterranean–Afro-Oriental distribution (Stegodyphus). Both selected drivers (productivity and seasonality) may affect the abundance of potential prey insects, but seasonality may further directly affect survival due to mortality caused by extreme climatic events. Based on a comprehensive dataset including information about the distribution of three independently derived social species and 13 solitary congeners we tested the hypotheses that the distribution of social Stegodyphus species relative to solitary congeners is: (1) restricted to habitats of high vegetation productivity and (2) constrained to areas with a stable climate (low precipitation seasonality). Results: Using spatial logistic regression modelling and information-theoretic model selection, we show that social species occur at higher vegetation productivity than solitary, while precipitation seasonality received limited support as a predictor of social spider occurrence. An analysis of insect biomass data across the Stegodyphus distribution range confirmed that vegetation productivity is positively correlated to potential insect prey biomass. Conclusions: Habitat productivity constrains the distribution of social spiders across continents compared to their solitary congeners, with group-living in spiders being restricted to areas with relatively high vegetation productivity and insect prey biomass. -

Animal Personality Aligns Task Specialization and Task Proficiency in a Spider Society,” by Colin M
Editorial Expression of Concern ECOLOGY PNAS is publishing an Editorial Expression of Concern regarding the following article: “Animal personality aligns task specialization and task proficiency in a spider society,” by Colin M. Wright, C. Tate Holbrook, and Jonathan N. Pruitt, which was first pub- lished June 16, 2014; 10.1073/pnas.1400850111 (Proc. Natl. Acad. Sci. U.S.A. 111, 9533–9537). The editors wish to alert readers of an ongoing investigation by McMaster University into the underlying data of this work. We will await the conclusion of the investigation to determine whether further action is required. Published under the PNAS license. First published May 7, 2020. www.pnas.org/cgi/doi/10.1073/pnas.2008526117 11844 | PNAS | May 26, 2020 | vol. 117 | no. 21 www.pnas.org Downloaded by guest on September 23, 2021 Animal personality aligns task specialization and task proficiency in a spider society Colin M. Wrighta,1, C. Tate Holbrookb, and Jonathan N. Pruitta aDepartment of Biological Sciences, University of Pittsburgh, Pittsburgh, PA 15260; and bDepartment of Natural Sciences, College of Coastal Georgia, Brunswick, GA 31520 Edited by Raghavendra Gadagkar, Indian Institute of Science, Bangalore, India, and approved May 19, 2014 (received for review January 16, 2014) Classic theory on division of labor implicitly assumes that task contexts, also may be important in orchestrating division of labor specialists are more proficient at their jobs than generalists and (15, 17, 18); however, our understanding of how animal per- specialists in other tasks; however, recent data suggest that this sonality maps onto conventional theory of social organization, might not hold for societies that lack discrete worker polymor- and division of labor in particular, is still in its infancy. -

Computational Models of Spider Activity Patterns Integrated with Behavioral Experiments Hypothesize Adaptive Benefits of the Circadian Clock
Computational models of spider activity patterns integrated with behavioral experiments hypothesize adaptive benefits of the circadian clock Andrew Mah1, Nadia Ayoub2, Thomas Jones3, Darrell Moore3, Natalia Toporikova2 1. Washington and Lee University, Neuroscience Program 2. Washington and Lee University, Department of Biology 3. East Tennessee State University, Department of Biological Science Table of Contents Introduction …………………… p. 1 Chapter 1 Simplified Drosophila circadian model fails to …………………… p. 7 recreate Cyclosa turbinata circadian oscillator Chapter 2 High variability in free-running behavior among three theridiid species suggests relaxed selection …………………… p. 12 on spider circadian rhythms Appendix 1. Explanation of Smolen et al. (2002) Model …………………… p. 20 Works Cited …………………… p. 22 Acknowledgments I would like to thank my advisors: Dr. Nadia Ayoub, Dr. Thomas Jones, Dr. Darrell Moore, and Dr. Natalia Toporikova, for their tireless mentorship. Without them, this thesis would not have been possible. This project was partially funded by Washington and Lee University Summer Research Scholars Grant (Summer 2017) Mah 1 Introduction Circadian rhythms are internally-generated biological clocks that underlie many important biological processes, including the sleep-wake cycle, basal metabolic rate, and the release of certain hormones (See Box 1 for glossary of termiology; Halberg et al. 2003). These rhythms appear to be nearly ubiquitous across life (Johnson and Kondo 2001), from prokaryotic cyanobacteria (Johnson et al. 1996) to humans (Patrick and Allen 1896), and may have evolved multiple times. Thus, circadian rhythms almost certainly confer an adaptive benefit (Dunlap 1999). Experiments in many diverse taxa, from cyanobacteria (Ouyang et al. 1998) to Drosophila (Beaver et al. 2002, 2003) to mammals (DeCoursey et al. -

Sociality in Theridiid Spiders: Repeated Origins of an Evolutionary Dead End
Evolution, 60(11), 2006, pp. 2342-2351 SOCIALITY IN THERIDIID SPIDERS: REPEATED ORIGINS OF AN EVOLUTIONARY DEAD END INGI AGNARSSON,1'234 LETICIA AVILES,1'5 JONATHAN A. CODDINGTON,3-6 AND WAYNE P. MADDISON1-2-7 1 Department of Zoology, University of British Columbia, 2370-6270 University Boulevard, Vancouver, British Columbia V6T 1Z4, Canada -Department of Botany, University of British Columbia, 3529-6270 University Boulevard, Vancouver, British Columbia V6T 1Z4, Canada ^Department of Entomology, Smithsonian Institution, NHB-105, PO Box 37012, Washington, D.C. 20013-7012 "'E-mail: [email protected] 5E-mail: laviles®zoology.ubc.ca ^E-mail: [email protected] 1 E-mail: wmaddisn @ interchange, ubc. ca Abstract.•Evolutionary ' 'dead ends" result from traits that are selectively advantageous in the short term but ultimately result in lowered diversification rates of lineages. In spiders, 23 species scattered across eight families share a social system in which individuals live in colonies and cooperate in nest maintenance, prey capture, and brood care. Most of these species are inbred and have highly female-biased sex ratios. Here we show that in Theridiidae this social system originated eight to nine times independently among 11 to 12 species for a remarkable 18 to 19 origins across spiders. In Theridiidae, the origins cluster significantly in one clade marked by a possible preadaptation: extended maternal care. In most derivations, sociality is limited to isolated species: social species are sister to social species only thrice. To examine whether sociality in spiders represents an evolutionary dead end, we develop a test that compares the observed phylogenetic isolation of social species to the simulated evolution of social and non-social clades under equal diversification rates, and find that sociality in Theridiidae is significantly isolated. -
Animal Behaviour: Task Differentiation by Personality In&Nbsp
Animal behaviour: task differentiation by personality in spider groups Article (Published Version) Grinsted, Lena and Bacon, Jonathan P (2014) Animal behaviour: task differentiation by personality in spider groups. Current Biology, 24 (16). R749-R751. ISSN 0960-9822 This version is available from Sussex Research Online: http://sro.sussex.ac.uk/id/eprint/49617/ This document is made available in accordance with publisher policies and may differ from the published version or from the version of record. If you wish to cite this item you are advised to consult the publisher’s version. Please see the URL above for details on accessing the published version. Copyright and reuse: Sussex Research Online is a digital repository of the research output of the University. Copyright and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable, the material made available in SRO has been checked for eligibility before being made available. Copies of full text items generally can be reproduced, displayed or performed and given to third parties in any format or medium for personal research or study, educational, or not-for-profit purposes without prior permission or charge, provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way. http://sro.sussex.ac.uk Dispatch R749 15. Marcet, B., Chevalier, B., Luxardi, G., Dougherty, G.W., et al. (2014). Mutations in 20. Spektor, A., Tsang, W.Y., Khoo, D., and Coraux, C., Zaragosi, L.E., Cibois, M., CCNO result in congenital mucociliary Dynlacht, B.D. -
Araneae, Theridiidae)
EVIDENCE OF KIN-SPECIFIC COMMUNICATION IN A TEMPERATE, SUBSOCIAL SPIDER ANELOSIMUS STUDIOSUS (ARANEAE, THERIDIIDAE) A thesis presented to the faculty of the Graduate School of Western Carolina University in partial fulfillment of the requirements for the degree of Master of Science in Biology. By Megan Ann Eckardt Director: Dr. Kefyn Catley Department of Biology Committee Members: Dr. James T. Costa, Biology Dr. Jeremy Hyman, Biology March 2013 ACKNOWLEDGMENTS I would like to thank my committee members and director for their support and encouragement during this process. In particular, my director Dr. Kefyn Catley helped inspire an interest and appreciation in spiders and Dr. James Costa inspired a greater interest in evolution, specifically in the behavior of arthropods. Additionally, many other faculty in the Biology department at Western Carolina University have provided thoughtful comments and teachings during my tenure; in particular, Dr. Jeremy Hyman, Dr. Joe Pechmann, Dr. Beverly Collins, Dr. Tom Martin, and Dr. Greg Adkison have been extremely helpful and influential. In addition to the support provided by Western Carolina University the research performed for this thesis would not have been possible without the support of a Grant-in- Aid from the Highlands Biological Station, and more specifically the benefactors of the Ralph M. Sargent Memorial Scholarship. I also extend thanks to my family, because without their continued support and encouragement in my education this thesis would not have been possible. TABLE OF CONTENTS Page -
Denver Museum of Nature & Science Reports
DENVER MUSEUM OF NATURE & SCIENCE REPORTS DENVER MUSEUM OF NATURE & SCIENCE REPORTS DENVER MUSEUM OF NATURE & SCIENCE & SCIENCE OF NATURE DENVER MUSEUM NUMBER 3, JULY 2, 2016 WWW.DMNS.ORG/SCIENCE/MUSEUM-PUBLICATIONS 2001 Colorado Boulevard Denver, CO 80205 Frank Krell, PhD, Editor and Production REPORTS • NUMBER 3 • JULY 2, 2016 2, • NUMBER 3 JULY Logo: A solifuge standing on top of South Table Mountain, one of the two table-top mountains anking the city of Golden, Colorado. South Table Mountain with the sun (or moon, for the solifuge) rising in the background is the logo for the city of Golden. The solifuge is in honor of the main focus of research by the host’s lab. Logo designed by Paula Cushing and Eric Parrish. The Denver Museum of Nature & Science Reports (ISSN Program and Abstracts 2374-7730 [print], ISSN 2374-7749 [online]) is an open- access, non peer-reviewed scientific journal publishing 20th International Congress of papers about DMNS research, collections, or other Arachnology Museum related topics, generally authored or co-authored by Museum staff or associates. Peer review will only be July 2–9, 2016 arranged on request of the authors. Colorado School of Mines, Golden, Colorado The journal is available online at www.dmns.org/Science/ Museum-Publications free of charge. Paper copies are Paula E. Cushing (Ed.) exchanged via the DMNS Library exchange program ([email protected]) or are available for purchase from our print-on-demand publisher Lulu (www.lulu.com). DMNS owns the copyright of the works published in the Schlinger Foundation Reports, which are published under the Creative Commons WWW.DMNS.ORG/SCIENCE/MUSEUM-PUBLICATIONS Attribution Non-Commercial license.