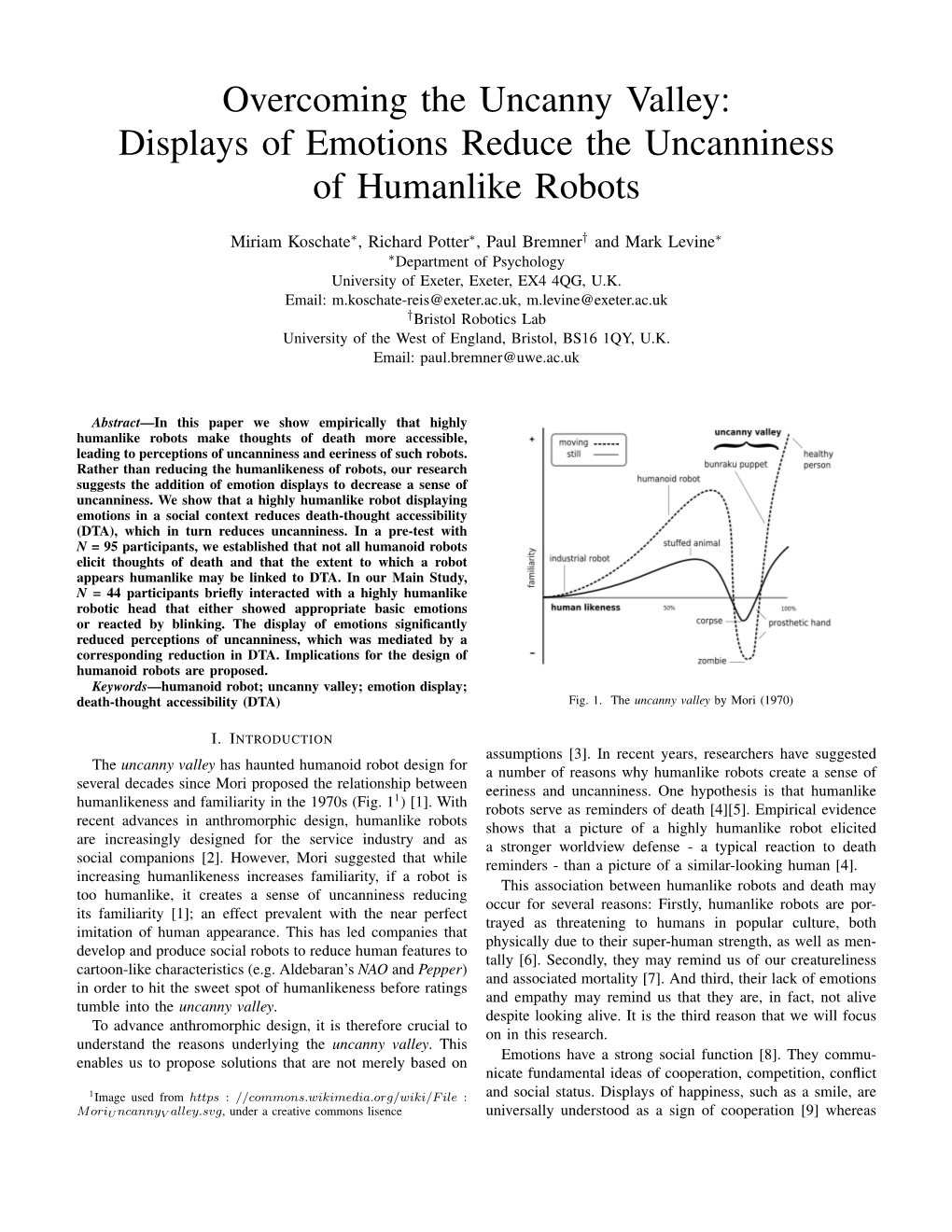
Displays of Emotions Reduce the Uncanniness of Humanlike Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Revisiting the Uncanny Valley Theory: Developing and Validating an Alternative to the Godspeed Indices
Computers in Human Behavior 26 (2010) 1508–1518 Contents lists available at ScienceDirect Computers in Human Behavior journal homepage: www.elsevier.com/locate/comphumbeh Revisiting the uncanny valley theory: Developing and validating an alternative to the Godspeed indices Chin-Chang Ho, Karl F. MacDorman * Indiana University School of Informatics, 535 West Michigan Street, Indianapolis, IN 46202, USA article info abstract Article history: Mori (1970) proposed a hypothetical graph describing a nonlinear relation between a character’s degree Available online 8 June 2010 of human likeness and the emotional response of the human perceiver. However, the index construction of these variables could result in their strong correlation, thus preventing rated characters from being Keywords: plotted accurately. Phase 1 of this study tested the indices of the Godspeed questionnaire as measures Affective appraisal of humanlike characters. The results indicate significant and strong correlations among the relevant indi- Embodied agents ces (Bartneck, Kulic´, Croft, & Zoghbi, 2009). Phase 2 of this study developed alternative indices with non- Human–robot interaction significant correlations (p > .05) between the proposed y-axis eeriness and x-axis perceived humanness Psychometric scales (r = .02). The new humanness and eeriness indices facilitate plotting relations among rated characters of Social perception varying human likeness. Ó 2010 Elsevier Ltd. All rights reserved. 1. Plotting emotional responses to humanlike characters interpersonal warmth (Asch, 1946; Fiske, Cuddy, & Glick, 2007; Rosenberg, Nelson, & Vivekananthan, 1968), which is also strongly Mori (1970) proposed a hypothetical graph describing a nonlin- correlated with other important measures, such as comfortability, ear relation between a character’s degree of human likeness and communality, sociability, and positive (vs. -

Digital Humans on the Big Screen
news Technology | DOI:10.1145/3403972 Don Monroe Digital Humans on the Big Screen Motion pictures are using new techniques in computer-generated imagery to create feature-length performances by convincingly “de-aged” actors. RTIFICIAL IMAGES HAVE been around almost as long as movies. As com- puting power has grown and digital photography Ahas become commonplace, special ef- fects have increasingly been created digitally, and have become much more realistic as a result. ACM’s Turing Award for 2019 to Patrick M. Hanrahan and Edwin E. Cat- mull reflected in part their contribu- tions to computer-generated imagery (CGI), notably at the pioneering anima- tion company Pixar. CGI is best known in science fic- tion or other fantastic settings, where audiences presumably already have suspended their disbelief. Similarly, exotic creatures can be compelling In Ang Lee’s 2019 action movie Gemini Man, Will Smith (right) is confronted by a younger when they display even primitive hu- clone of himself (left). This filmmakers went through a complicated process to “de-age” man facial expressions. Increasingly, Smith for the younger role. however, CGI is used to save money on time, extras, or sets in even mun- actors. Artificial intelligence also in- “In many ways it felt less about a visual dane scenes for dramatic movies. creasingly will augment the labor-inten- effect and more like we were creating a re- To represent principal characters, sive effects-generation process, allowing ality and aiming to work out exactly how however, filmmakers must contend filmmakers to tell new types of stories. the human face works, operates, but also with our fine-tuned sensitivity to facial how it ages over time,” added Stuart Ad- expressions. -

AUDIENCE PERCEPTION of EXAGGERATED MOTION on REALISTIC ANIMATED CREATURES by Mackenzie Hammer
AUDIENCE PERCEPTION OF EXAGGERATED MOTION ON REALISTIC ANIMATED CREATURES by Mackenzie Hammer A Thesis Submitted to the Faculty of Purdue University In Partial Fulfillment of the Requirements for the degree of Master of Science Department of Computer Graphics Technology West Lafayette, Indiana August 2019 2 THE PURDUE UNIVERSITY GRADUATE SCHOOL STATEMENT OF COMMITTEE APPROVAL Prof. Nicoletta Adamo, Chair Department of Computer Graphics Technology Prof. Andrew Buchanan Department of Computer Graphics Technology Prof. Esteban Garcia Department of Computer Graphics Technology Prof. Dan Triplett Department of Computer Graphics Technology Approved by: Dr. Colin Gray Head of the Graduate Program Prof. Nicoletta Adamo Head of the Graduate Program 3 To my parents, brother, sister, and fiancé. For their continuous love and support in my pursuit to study Animation, and for the patience they had to listen to the many ramblings of a passionate artist along the way. 4 ACKNOWLEDGMENTS I wish to gratefully acknowledge my professors and thesis committee members for their insightful guidance, encouragement, and contribution to the completion of this work. 5 TABLE OF CONTENTS LIST OF TABLES .......................................................................................................................... 7 LIST OF FIGURES ........................................................................................................................ 8 ABSTRACT ................................................................................................................................... -

Running Head: Weak Uncanny Valley for Controlled Face Images Virtual
Running head: Weak Uncanny Valley for Controlled Face Images Virtual Faces Evoke Only a Weak Uncanny Valley Effect: An Empirical Investigation with Controlled Virtual Face Images Jari Kätsyri1,2*, Beatrice de Gelder1, Tapio Takala2 1Department of Cognitive Neuroscience, Maastricht University, Netherlands 2Department of Computer Science, Aalto University, Finland *Correspondence: Jari Kätsyri, Department of Computer Science, P.O.Box 15400, FI-00076 Aalto, Finland. jari.katsyri (at) aalto.fi Preprint version 2019-09-04 Running head: Weak Uncanny Valley for Controlled Face Images Abstract The uncanny valley (UV) hypothesis suggests that increasingly human-like robots or virtual characters elicit more familiarity in their observers (positive affinity) with the exception of near- human characters that elicit strong feelings of eeriness (negative affinity). We studied this hypothesis in three experiments with carefully matched images of virtual faces varying from artificial to realistic. We investigated both painted and computer-generated (CG) faces to tap a broad range of human-likeness and to test whether CG faces would be particularly sensitive to the UV effect. Overall, we observed a linear relationship with a slight upward curvature between human-likeness and affinity. In other words, less realistic faces triggered greater eeriness in an accelerating manner. We also observed a weak UV effect for CG faces; however, least human-like faces elicited much more negative affinity in comparison. We conclude that although CG faces elicit a weak UV effect, this effect is not fully analogous to the original UV hypothesis. Instead, the subjective evaluation curve for face images resembles an uncanny slope more than a UV. Based on our results, we also argue that subjective affinity should be contrasted against subjective rather than objective measures of human-likeness when testing UV. -

Many Faced Robot - Design and Manufacturing of a Parametric, Modular and Open Source Robot Head
Many Faced Robot - Design and Manufacturing of a Parametric, Modular and Open Source Robot Head Metodi Netzev1, Quentin Houbre1, Eetu Airaksinen1, Alexandre Angleraud1 and Roel Pieters1 Abstract— Robots developed for social interaction and care show great promise as a tool to assist people. While the functionality and capability of such robots is crucial in their acceptance, the visual appearance should not be underesti- mated. Current designs of social robots typically can not be altered and remain the same throughout the life-cycle of the robot. Moreover, customization to different end-users is rarely taken into account and often alterations are strictly prohibited due to the closed-source designs of the manufacturer. The current trend of low-cost manufacturing (3D printing) and open-source technology, however, open up new opportunities for third parties to be involved in the design process. In this work, we propose a development platform based on FreeCAD that offers a parametric, modular and open-source design tool specifically aimed at robot heads. Designs can be generated by altering different features in the tool, which automatically Fig. 1. Different end-users of social robots require different features and design. The designs shown here are generated by the parametric and modular reconfigures the head. In addition, we present several design development platform, proposed in this work. Left design shows a robot approaches that can be integrated in the design to achieve head with wooden facial covering. Right design shows a robot head with different functionalities (face and skin aesthetics, component more humanoid characteristics. Both designs can be generated by changing assembly), while still relying on 3D printing technology. -

Robots: Is the Uncanny Valley Real?
BBC - Future Robots: Is the uncanny valley real? http://www.bbc.com/future/story/20130901-is-the-uncan... 2 September 2013 Robots: Is the uncanny valley real? By Rose Eveleth Total recoil The uncanny valley concept states that we are unsettled by robots and models that look almost, but not quite human. (Copyright: Getty Images) For decades the golden rule in robotics has been that the more lifelike a creation, the more likely it crosses the line from cute to creepy. But questions are being raised as to whether this is really true. Mick Walters opens a door in his lab and points his computer’s camera towards the small, blurry, tan-coloured object he has just revealed. "This is Kaspar Two," he says. As the Skype connection catches up, an image of a robot in a baseball hat, a blue button-down shirt and striped socks appears. Kaspar Two is a robot child. He's not even on, just sitting slumped over. Even though the image is somewhat fuzzy, Kaspar Two is able to give me that feeling, that nagging sense of unease. "I must admit," says Walters, "when I first actually built Kaspar, I did think he was a bit uncanny." Kaspar has been created at University of Hertfordshire, UK to help children with autism understand how to read emotions and engage with other people, but it falls into what's often 1 of 4 09/03/2013 09:48 AM BBC - Future Robots: Is the uncanny valley real? http://www.bbc.com/future/story/20130901-is-the-uncan.. -

Evaluation of the Uncanny Valley in CG Characters
SBC - Proceedings of SBGames 2012 Computing Track – Full Papers Evaluation of the Uncanny Valley in CG Characters Laura M. Flach Vanderson Dill Christian Lykawka Rafael H. de Moura M´arcio S. Pinho FACIN/PUCRS Soraia R. Musse Virtual Reality Group Virtual Humans Simulation Lab FACIN/PUCRS FACIN/PUCRS Abstract To answer these questions, we proposed an evalu- ation methodology based on a questionnaire with This paper revisits the Uncanny Valley subject in subjects. First, we selected representative char- order to evaluate its effects on the perception of acters from recent and well known movies and characters that currently use computer graphics, games, and other characters that are unknown. animation and computer simulation. It is based In order to evaluate the public's empathy with on surveys that generated hundreds of samples the chosen characters, we conducted a two-stages and showed preliminary results about new criteria questionnaire. In the first stage we presented still and correlations regarding the familiarity of the images and, in the second stage, videos with the characters with the public. The analysis of famil- performance of the same characters in the same iarity in those characters showed great agreement scenes. with the original curve of the uncanny valley. Fu- ture enhancements are then suggested to add new As the results, more than two hundred of analysed dimensions to the original graph. samples leaded to conclusions that indicated the uncanny valley hypothesis is valid for CG char- acters. The following sections cover the related Keywords:: Uncanny Valley, Computer works on the subject, the model for evaluation Graphics, Modern Media, Movies, Games (including the details of both surveys), obtained results and final considerations. -

The Japanese Roboticist Masahiro Mori's Buddhist Inspired Concept Of
A peer-reviewed electronic journal published by the Institute for Ethics and Emerging Technologies ISSN 1541-0099 23(1) – December 2013 The Japanese Roboticist Masahiro Mori’s Buddhist Inspired Concept of “The Uncanny Valley” (Bukimi no Tani Genshō, 不気味の谷現象) W.A. Borody Department of Political Science, Philosophy and Economics Nipissing University, Canada [email protected] Journal of Evolution and Technology - Vol. 23 Issue 1 – December 2013 - pgs 31-44 ABSTRACT In 1970, the Japanese roboticist and practicing Buddhist Masahiro Mori wrote a short essay entitled “On the Uncanny Valley” for the journal Energy (Enerugi, 7/4, 33–35). Since the publication of this two-page essay, Mori’s concept of the Uncanny Valley has become part and parcel of the discourse within the fields of humanoid robotics engineering, the film industry, culture studies, and philosophy, most notably the philosophy of transhumanism. In this paper, the concept of the Uncanny Valley is discussed in terms of the contemporary Japanese cultural milieu relating to humanoid robot technology, and the on-going roboticization of human culture. For Masahiro Mori, who is also the author of The Buddha in the Robot (1981), the same compassion that we ought to offer to all living beings, and Being itself, we ought to offer to humanoid robots, which are also dimensions of the Buddha-nature of Compassion. “What is this, Channa?” asked Siddhartha. “Why does that man lie there so still, allowing these people to burn him up? It's as if he does not know anything.” “He is dead," replied Channa. “Dead! Channa, does everyone die?” 31 “Yes, my dear prince, all living things must die some day. -

Uncanny Valley of Life : the Existence in 3D Animation in Shadow Puppets Theatre
Journal of Computing Technologies and Creative Content 1(1), 1-5, August 2016 Uncanny Valley of Life : The Existence in 3D Animation in Shadow Puppets Theatre Dahlan Abdul Ghani Universiti Kuala Lumpur Malaysian Institute of Information Technology Menara Bandar Wawasan, PO 50250 Kuala Lumpur [email protected] original hypothesis states that as the appearance of a robot is made Abstract - Mori (1970) proposed a theoretical graph describing a nonlinear relation between a character’s degree of human likeness and more human, some human observer's emotional response to the the emotional response of the human perceiver. With the current scenario robot will become increasingly positive and empathic, until a point that Wayang Kulit or shadow puppets is slowly being extinct; the pursuit is reached beyond which the response quickly becomes that of a of realism in virtual humans including Wayang Kulit 3D puppets can strong revulsion. This area of repulsive response aroused by a robot cause a phenomenon known as The “Uncanny Valley”. Furthermore, 3D with appearance and motion between a "barely human" and "fully computer animated or virtual puppets are more focused on issues human" entity is called the Uncanny Valley. With computer 3D pertaining to realism compared to the abstract visual such as Wayang animation, it provides a platform for the audience to view visuals or Kulit itself. Therefore, this research will discuss on issues which arises in the Uncanny Valley of Life that exists especially with Wayang Kulit 3D shadow puppets with 3D perspective, depth, weight, size and computer animated puppet characters. emotions, in the realm of absolutely ‘Real’. -

The Uncanny Valley: Existence and Explanations
Review of General Psychology © 2015 American Psychological Association 2015, Vol. 19, No. 4, 393–407 1089-2680/15/$12.00 http://dx.doi.org/10.1037/gpr0000056 The Uncanny Valley: Existence and Explanations Shensheng Wang, Scott O. Lilienfeld, and Philippe Rochat Emory University More than 40 years ago, Japanese roboticist Masahiro Mori (1970/2005) proposed the “uncanny valley” hypothesis, which predicted a nonlinear relation between robots’ perceived human likeness and their likability. Although some studies have corroborated this hypothesis and proposed explanations for its existence, the evidence on both fronts has been mixed and open to debate. We first review the literature to ascertain whether the uncanny valley exists. We then try to explain the uncanny phenomenon by reviewing hypotheses derived from diverse theoretical and methodological perspectives within psychol- ogy and allied fields, including evolutionary, social, cognitive, and psychodynamic approaches. Next, we provide an evaluation and critique of these studies by focusing on their methodological limitations, leading us to question the accepted definition of the uncanny valley. We examine the definitions of human likeness and likability, and propose a statistical test to preliminarily quantify their nonlinear relation. We argue that the uncanny valley hypothesis is ultimately an engineering problem that bears on the possibility of building androids that may some day become indistinguishable from humans. In closing, we propose a dehumanization hypothesis to explain the uncanny phenomenon. Keywords: animacy, dehumanization, humanness, statistical test, uncanny valley Over the centuries, machines have increasingly assumed the characters (avatars), such as those in the film The Polar Express heavy duties of dangerous and mundane work from humans and (Zemeckis, 2004), reportedly elicited unease in some human ob- improved humans’ living conditions. -

Applications Overcoming the Uncanny Valley
Editor: Mike Potel Applications www.wildcrest.com Overcoming the Uncanny Valley tories about golems—humanlike beings simpli" ed and underlined reality that makes them Tom Geller molded from base clay—have ancient origins visually magnetic.” (The market seems to have in Jewish folklore. According to traditional sided with Ebert, as the movie recouped its $150- Sstories, these soulless creatures serve wise men for million-dollar budget by its ninth week.) both household tasks and community protection. Many who criticized The Polar Express pointed Just as often, golems turn on their masters. But to a short 1970 essay by Japanese roboticist Ma- mindlessness, not malice, fuels their conversions sahiro Mori. The essay’s title, “Bukimi no tani,” to brutality. For these automatons are humanlike is widely translated as “The Uncanny Valley.” In but not quite human—they’re like animated corps- it, Mori gave examples of several types of mov- es, lacking volition and desire. ing and still humanlike images. He posited that, Some say the golems’ nearness to ourselves when such characters approach realistic similar- makes them more frightening than other threats. ity to humans, they stop being likable and instead Whereas a lion might tear our ! esh and a " re become eerie, frightening, repulsive—“uncanny.” might cause greater destruction, golems—even But if the similarity is perfected, the supposition when peaceful—mock us with reminders of how goes, such images would become indistinguishable easily we could lose the warmth that de" nes our from humans and therefore elicit as much attrac- humanity. Scary stories throughout history have tion and sympathy as an ordinary person. -

Robot Umanoidi E Tecniche Di Interazione Naturale Per Servizi Di Accoglienza Ed Informazioni
POLITECNICO DI TORINO Corso di Laurea Magistrale in Ingegneria Informatica Tesi di Laurea Magistrale Robot umanoidi e tecniche di interazione naturale per servizi di accoglienza ed informazioni Relatori Prof. Fabrizio Lamberti Ing. Federica Bazzano Candidato Simon Dario Mezzomo Dicembre 2017 Quest’opera è stata rilasciata con licenza Creative Commons Attribuzione - Non commerciale - Non opere derivate 4.0 Internazionale. Per leggere una copia della licenza visita il sito web http://creativecommons.org/licenses/by-nc-nd/4.0/ o spedisci una lettera a Creative Commons, PO Box 1866, Mountain View, CA 94042, USA. Ringraziamenti Grazie a tutti quelli che mi sono stati vicino durante questo lungo percorso che mi ha portato al tanto atteso traguardo della laurea. A tutta la famiglia che mi ha sempre sostenuto anche nei momenti più difficili. Agli amici di casa e di università Andrea, Hervé, Jacopo, Maurizio, Didier, Marco, Matteo, Luca, Thomas, Nicola, Simone che hanno condiviso numerose esperienze. A tutti i colleghi di lavoro Edoardo, Francesco, Emanuele, Gianluca, Gabriele, Nicolas, Rebecca, Chiara, Allegra. E a tutti quelli di cui mi sarò sicuramente scordato. iii Sommario L’obiettivo di questo lavoro di tesi è quello di esplorare l’uso di robot umanoidi nel- l’ambito della robotica di servizio per applicazioni che possono essere utili all’uomo e di analizzarne l’effettiva utilità. In particolare, è stata analizzata l’interazione con un robot umanoide (generalmente chiamato receptionist) che accoglie gli utenti e fornisce loro, su richiesta, delle indicazioni per raggiungere il luogo in cui questi si vogliono recare. L’innovazione rispetto allo stato dell’arte in materia consiste nell’integrare le in- dicazioni vocali fornite all’utente con delle indicazioni che mostrano il percorso da seguire su una mappa posta di fronte al robot.