Metamodel Based Design Optimization in Industrial Turbomachinery
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Engineering the Future – Since 1758
MAN Energy Solutions MAN Energy Solutions Product range und product centres 3 Steinbrinkstr. 1 2 46145 Oberhausen, Germany Turbomachinery P + 49 208 692-01 F + 49 208 692-021 [email protected] www.man-es.com Factories Engineering turbomachinery Turbo- the future – Bangalore, India MAN Turbomachinery India Private Limited since 175 8 Plot No. 113 | Jigani link Road KIADB Industrial Area | Jigani | 560105 Bangalore, India Phone +91 80 6655 2200 | Fax +91 80 6655 2222 machinery We are MAN Energy Solutions SE, the force of Berlin, Germany innovation behind the world’s leading large-bore MAN Energy Solutions SE engines and turbomachinery for marine and Egellsstr. 21 13507 Berlin, Germany stationary applications. Our home is in Augsburg, Phone +49 30 440402-0 | Fax +49 30 440402-2000 Germany. But we are also close to you, in over 100 countries, with more than 15,000 employees Changzhou, China who dedicate each workday to our customer’s MAN Diesel & Turbo China Production Co. Ltd. Fengming Road 9, Wujin High-Tech Industrial Zone satisfaction. 213164 Changzhou, P. R. China Phone +86 519 8622-7001 | Fax +86 519 8622-7002 Our products are an integral part of Between 1893 and 1897, Rudolf custom, fully integrated train solutions most energy and transportation solu- Diesel and a group of M.A.N. engineers that are unsurpassed in performance, Deggendorf, Germany tions that surround you every day. We developed the first diesel engine in efficiency and reliability. MAN Energy Solutions SE produce world-class marine propulsion Augsburg, and in 1904 we produced Werftstr. 17 systems, turbomachinery for the our first steam turbine in Oberhausen. -
Modelling of a Turbojet Gas Turbine Engine
The University of Manchester Research Modelling of a turbojet gas turbine engine Document Version Accepted author manuscript Link to publication record in Manchester Research Explorer Citation for published version (APA): Klein, D., & Abeykoon, C. (2015). Modelling of a turbojet gas turbine engine. In host publication (pp. 198-204) Published in: host publication Citing this paper Please note that where the full-text provided on Manchester Research Explorer is the Author Accepted Manuscript or Proof version this may differ from the final Published version. If citing, it is advised that you check and use the publisher's definitive version. General rights Copyright and moral rights for the publications made accessible in the Research Explorer are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Takedown policy If you believe that this document breaches copyright please refer to the University of Manchester’s Takedown Procedures [http://man.ac.uk/04Y6Bo] or contact [email protected] providing relevant details, so we can investigate your claim. Download date:02. Oct. 2021 Modelling of a Turbojet Gas Turbine Engine Dominik Klein Chamil Abeykoon Division of Applied Science, Computing and Engineering, Division of Applied Science, Computing and Engineering, Glyndwr University, Mold Road, LL11 2AW, Wrexham, Glyndwr University, Mold Road, LL11 2AW, Wrexham, United Kingdom United Kingdom E-mail: [email protected] E-mail: [email protected]; [email protected] Abstract—Gas turbines are one of the most important A. -
The Effect of the Process on Turbomachinery Reliability)
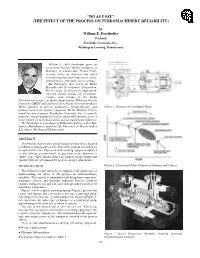
“DO AS I SAY” (THE EFFECT OF THE PROCESS ON TURBOMACHINERY RELIABILITY) by William E. Forsthoffer President Forsthoffer Associates Inc., Washington Crossing, Pennsylvania William E. (Bill) Forsthoffer spent six years at the Delaval Turbine Company, as Manager of Compressor Project Engi- neering, where he designed and tested centrifugal pumps and compressors, gears, steam turbines, and rotary (screw) pumps. Mr. Forsthoffer then joined the Mobil Research and Development Corporation. For five years, he directed the application, selection, design, testing, site precommis- sioning, and startup of the Yanbu Petrochemical complex in Yanbu, Saudi Arabia. Following that, he returned to MRDC and established a technical service program for Mobil affiliates to provide application, troubleshooting, and Figure 1. Diagram of Centrifugal Pump. training services for rotating equipment. He left Mobil in 1990 to found his own company, Forsthoffer Associates, Inc., to provide training, critical equipment selection, and troubleshooting services to the refining, petrochemical, utility, and gas transmission industries. Mr. Forsthoffer is a graduate of Bellarmine College with a B.A. degree (Mathematics) and from the University of Detroit with a B.S. degree (Mechanical Engineering). ABSTRACT This tutorial examines the primary cause of lower than expected reliability in turbomachines, the effect of the process on machinery component life. Over 95 percent of the rotating equipment installed in any refinery, petrochemical, or gas plant is the dynamic or “turbo” type. Their characteristics are limited energy output and variable flow rate determined by process energy requirements. INTRODUCTION Figure 2. Centrifugal Pump Component Damage and Causes. The objective of this tutorial is to emphasize the importance of understanding the effect of the process on turbomachinery reliability. -

Turbomachinery Technology for High-Speed Civil Flight
4 NASA Technical Memorandum 102092 . Turbomachinery Technology for High-speed Civil Flight , Neal T. Saunders and Arthur J. Gllassman Lewis Research Center Cleveland, Ohio Prepared for the 34th International Gas Turbine Aepengine Congress and Exposition sponsored by the American Society of Mechanical Engineers Toronto, Canada, June 4-8, 1989 ~ .. (NASA-TH-102092) TURBOHACHINERY TECHPCLOGY N89-24320 FOR HIGH-SPEED CIVIL FLIGHT (NBSEL, LEV& Research Center) 26 p CSCL 21E Unclas G3/07 0217641 TURBOMACHINERY TECHNOLOGY FOR HIGH-SPEED CIVIL FLIGHT Neal T. Saunders and Arthur J. Glassman ABSTRACT This presentation highlights some of the recent contributions and future directions of NASA Lewis Research Center's research and technology efforts applicable to turbomachinery for high-speed flight. For a high-speed civil transport application, the potential benefits and cycle requirements for advanced variable cycle engines and the supersonic throughflow fan engine are presented. The supersonic throughf low fan technology program is discussed. Technology efforts in the basic discipline areas addressing the severe operat- ing conditions associated with high-speed flight turbomachinery are reviewed. Included are examples of work in internal fluid mechanics, high-temperature materials, structural analysis, instrumentation and controls. c INTRODUCTION Future Emphasis Shifting to High-speed Flight Two years ago, the aeronautics community commemorated the 50th anniversary of the first successful operation of a turbojet engine. This remarkable feat by Sir Frank Whittle represents the birth of the turbine engine industry, which has greatly refined and improved Whittle's invention into the splendid engines that are flying today. NASA, as did its predecessor NACA, has assisted indus- try in the creation and development of advanced technologies for each new gen- eration of engines. -

Application Note Acoustic Excitation of Turbomachinery Blisks
www.mpihome.com Application Note Acoustic Excitation of Turbomachinery Blisks ■ Generating an engine order excitation ■ m+p’s acoustic blisk excitation software ■ Analyzing the dynamic responses of ■ m+p Analyzer for data capture and post-processing turbomachinery blisks ■ m+p VibRunner acquisition hardware ■ Four sine excitation modes During operation wind, gas and steam turbine blades are subject to high dynamic forces introduced by the working fluid. In order to assess the structural health of the blades, dynamic analyses are carried out in laboratory tests. Highly specialized test rigs are designed for analyses of blades in rotating and stationary operating conditions. Especially for stationary tests, it is crucial to artificially replicate the typical excitations acting on the rotor blades during operation, known as engine order excitation. m+p international designed a software package which enables engineers to generate an engine order excitation and analyze the dynamic responses of the turbomachinery blisks in the safety of the laboratory. Application Note Acoustic Excitation of Turbomachinery Blisks 1 Background: During operation the working fluid acts on the rotating turbine blades, creating a pulsating pressure field. Circumferentially expanding this pressure field yields a harmonic series whose coefficients are called engine orders. Basically, an engine order describes the number of sine waves traveling along the circumference of the rotor (figure 1). The corresponding excitation frequency is the product of the rotational speed and the specific engine order, EO. Only a few engine orders will be encountered during operation. Thus, it is often possible to reduce the whole pressure field to a single engine order. m+p international’s acoustic blisk excitation software replicates this engine order excitation by controlling the given actuators accordingly. -

Design, Construction and Performance Evaluation of Axial Flow Fans
DESIGN, CONSTRUCTION AND PERFORMANCE EVALUATION OF AXIAL FLOW FANS A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES OF MIDDLE EAST TECHNICAL UNIVERSITY BY HAYRETTİN ÖZGÜR KEKLİKOĞLU IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN MECHANICAL ENGINEERING SEPTEMBER 2019 Approval of the thesis: DESIGN, CONSTRUCTION AND PERFORMANCE EVALUATION OF AXIAL FLOW FANS submitted by HAYRETTİN ÖZGÜR KEKLİKOĞLU in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering Department, Middle East Technical University by, Prof. Dr. Halil Kalıpçılar Dean, Graduate School of Natural and Applied Sciences Prof. Dr. M. A. Sahir Arıkan Head of Department, Mechanical Engineering Prof. Dr. Kahraman Albayrak Supervisor, Mechanical Engineering, METU Examining Committee Members: Assoc. Prof. Dr. Cüneyt Sert Mechanical Engineering. METU Prof. Dr. Kahraman Albayrak Mechanical Engineering, METU Assoc. Prof. Dr. Mehmet Metin Yavuz Mechanical Engineering, METU Assist. Prof. Dr. Özgür Uğraş Baran Mechanical Engineering, METU Assist. Prof. Dr. Ekin Özgirgin Yapıcı Mechanical Engineering, Çankaya University Date: 03.09.2019 I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work. Name, Surname: Hayrettin Özgür Keklikoğlu Signature: iv -

Selection of Turbomachinery-Centrifugal Compressors
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Texas A&M Repository SELECTION OF TURBOMACHINERY-CENTRIFUGAL COMPRESSORS by Gary A. Ehlers Senior Supervising Engineer Ralph M. Parsons Company Pasadena, California INTRODUCTION Gary A. Ehlers, is Senior Supervising Selection of a centrifugal compressor starts with performance Engineer in the Rotating Equipment Engi calculations. After basic machine performance is determined, neering group ofthe Engineering Department the mechanical construction is addressed. The primary areas of at Ralph M. Parsons Company, Pasadena, concern are metallurgy, shaft sealing and rotordynamics. California. He supervises the activities re Rotordynamics analysis (RDA) of turbomachinery designs lated to the rotating equipment engineering should be made during selection. A lateral critical speed study on projects. Thetypes of machineryrespon includes undamped critical speed analysis, plot of the undamped sibilities include centrifugaland reciprocat critical speeds as a functionof stiffness, synchronous unbalance ing compressors, axial flow compressors, response analysis, and stability analysis. The stability analysis is steam and gas turbines, centrifugal and concerned with all calculated subharmonic, self-excited vibra reciprocating pumps, and gas expanders. tions of the rotor. Oil whirl is one such common example of He has been employed at Parsons for the last 20years and previously subharmonic instability of concern in design of the rotor bearing at Worthington Compressor and Engine International as an Appli support of turbomachinery. Other instabilities result from dis cation Engineer in power and process marketing. turbing/destabilizing forces from aerodynamic sources or shaft Hehas worked on primarily refinerytype projects domestically,in seal design. the Middle East, and Asia and on cogeneration and oil production Rotordynamics of a centrifugal compressor with oil film seals type projects. -

An Investigation of Turbomachinery Concepts for an Isothermal Compressor Used in an S-CO2 Bottoming Cycle
The 6th International Supercritical CO2 Power Cycles Symposium March 27 - 29, 2018, Pittsburgh, Pennsylvania An Investigation of Turbomachinery Concepts for an Isothermal Compressor Used in an S-CO2 Bottoming Cycle Jin Young Heo Seong Gu Kim Jeong Ik Lee PhD Candidate PhD Candidate Associate Professor KAIST KAIST KAIST Daejeon, South Korea Daejeon, South Korea Daejeon, South Korea ABSTRACT Various technology options are under progress to investigate the benefits of using an isothermal compressor for the s-CO2 bottoming cycle applications. In previous works, the partial heating cycle has been investigated to show that there can be great increase in total net work when an isothermal compressor is applied to the system. The research covers the investigation on mainly three different turbomachinery concepts to realize the isothermal compressor, the radial-type compressor with impeller cooling, the multistage compressor with intercoolers, and the axial-type compressor with rotor and stator cooling. As a result, the concepts are mainly limited by the realistic cooling flux level that can be applied to the heat transfer surface, but the multistage compressor with intercoolers may be a viable candidate as long as the pressure drop in intercoolers remains low. INTRODUCTION To combat the issue of global warming, the development of various technologies is currently under progress to improve the performance of the conventional waste heat recovery systems. Various sources of waste heat, from glass manufacturing, steel manufacturing, and gas turbine exhaust, can be recovered to generate electricity by adopting another power cycle [1]. Among the candidates to enhance the current performance limits, the supercritical CO2 power cycle (s-CO2 cycle) has been considered a viable option to replace the conventional steam Rankine cycle, the system most often utilized for the bottoming cycle. -
Axial Flow Fan Design
BASF Corporation BASIC GUIDELINES FOR PLASTIC CONVERSION OF METAL AXIAL FLOW FANS INTRODUCTION This guideline outlines in brief the basic steps recommended for the development of a plastic conversion of a metal fan. It is limited with respect to axial flow type fans, and does not necessarily address a single classification within that family. The field of fan design is quite extensive and complex, it is therefore impossible to address all aspects of axial fan design within the scope of this paper. It is suggested that these rules be utilized in general sense as a starting point in the development process especially when initial geometric data is lacking. It is also essential to integrate a testing program throughout the different development stages, to evaluate the performance of the various basic design changes and their impact on achieving the desired outcome. TABLE OF CONTENTS Topic Page 1.DEVELOPMENT GUIDELINES 1 - 14 2. PLASTICS IN MAJOR FAN APPLICATIONS 14 - 15 3. TECHNICAL SUPPORT FROM BASF CORPORATION 15 - 18 4. SUMMARY OF AN ACTUAL DEVELOPMENT PROGRAM 18 - 28 5. APPENDIX DOCUMENT STRUCTURE This document is structured around four main topics. The first one highlights basic rules that are recommended for developing baseline dimensions of axial flow in a metal to plastic conversion application. The second topic describes in summary the general methods used to optimize plastic fans. The third topic presents in brief BASF Corporationdesign support capabilities in this field, and finally the last topic goes over an actual fan development program at BASF facilities. 1 DEVELOPMENT GUIDELINES Axial Flow Fans Axial flow fans, while incapable of developing high pressures, they are well suitable for handling large volumes of air at relatively low pressures. -

Gas Turbines in Simple Cycle and Combined Cycle Applications
GAS TURBINES IN SIMPLE CYCLE & COMBINED CYCLE APPLICATIONS* Gas Turbines in Simple Cycle Mode Introduction The gas turbine is the most versatile item of turbomachinery today. It can be used in several different modes in critical industries such as power generation, oil and gas, process plants, aviation, as well domestic and smaller related industries. A gas turbine essentially brings together air that it compresses in its compressor module, and fuel, that are then ignited. Resulting gases are expanded through a turbine. That turbine’s shaft continues to rotate and drive the compressor which is on the same shaft, and operation continues. A separate starter unit is used to provide the first rotor motion, until the turbine’s rotation is up to design speed and can keep the entire unit running. The compressor module, combustor module and turbine module connected by one or more shafts are collectively called the gas generator. The figures below (Figures 1 and 2) illustrate a typical gas generator in cutaway and schematic format. Fig. 1. Rolls Royce RB211 Dry Low Emissions Gas Generator (Source: Process Plant Machinery, 2nd edition, Bloch & Soares, C. pub: Butterworth Heinemann, 1998) * Condensed extracts from selected chapters of “Gas Turbines: A Handbook of Land, Sea and Air Applications” by Claire Soares, publisher Butterworth Heinemann, BH, (for release information see www.bh.com) Other references include Claire Soares’ other books for BH and McGraw Hill (see www.books.mcgraw-hill.com) and course notes from her courses on gas turbine systems. For any use of this material that involves profit or commercial use (including work by nonprofit organizations), prior written release will be required from the writer and publisher in question. -

Turbomachinery Technology for Reduced Fuel Burn
NASA SBIR 2016 Phase I Solicitation A1.07 Propulsion Efficiency - Turbomachinery Technology for Reduced Fuel Burn Lead Center: GRC System and technology studies have indicated that advanced gas turbine propulsion will remain critical for future subsonic transports. Turbomachinery includes the rotating machinery in the high and low pressure spools, transition ducts, purge and bleed flows, casing and hub. We are interested in traditional gas turbine turbomachinery, as well as in innovative concepts as exo-skeletal engines, intercooled gas turbines, cooled cooling air, waste heat recovery, and other concepts. NASA is looking for improvement in aeropropulsive efficiency. Areas of interest include: Improved components of current architectures and cycles, novel components and cycles to improve cycle limits, and novel architectures to improve mission efficiency limits. In the compression system, advanced concepts and technologies are required to enable higher overall pressure ratio, high stage loading and wider operating range. In the turbine, the very high cycle temperatures demanded by advanced engine cycles place a premium on the cooling technologies required to ensure adequate life of the turbine component. New capabilities as well as challenges are provided with expected increased use of ceramic matrix composites (CMC’s). Reduced cooling flow rates and/or increased cycle temperatures enabled by these technologies have a dramatic impact on the engine performance. Such improvements will enable reduced fuel burn, reduced weight and part count, and will enable advanced variable cycle engines for various missions. Innovative proposals in the following turbomachinery and heat transfer areas are solicited: Small core turbomachinery - Higher fan Bypass Ratio (BPR) will require more compact engine core sizes rather than by growing the fan diameter, resulting in large tip/endwall and purge flow losses. -

Smith Diagram for Low Reynolds Number Axial Fan Rotors
Paper ID: ETC2017-069 Proceedings of 12th European Conference on Turbomachinery Fluid dynamics & Thermodynamics ETC12, April 3-7, 2017; Stockholm, Sweden SMITH DIAGRAM FOR LOW REYNOLDS NUMBER AXIAL FAN ROTORS R. Corralejo - P. Harley Dyson Ltd., Malmesbury, UK [email protected] ABSTRACT Compressor operation at low Reynolds numbers is commonly associated with a loss in- crease. A semi-analytical approach was used to investigate this region of the design spec- trum. To do this, an axial rotor with constant diameter endwalls was non-dimensionalised to understand the influence of different design parameters independently. Smith diagrams showing contours of efficiency on a plot of flow coefficient versus stage loading coefficient were produced at low and high Reynolds numbers. The results showed not only lower levels of efficiency at low Reynolds numbers but a much narrower high efficiency island, with losses rapidly increasing as the design moved away from the high efficiency region. Several points in the Smith diagram were selected, dimensionalised and simulated using CFD with and without a transition model. Good agreement between the CFD and the model was found, with discrepancies increasing towards low efficiency regions. Meanline correlations for the low Reynolds number regime were also provided. KEYWORDS: Axial fan, Reynolds number, Smith diagram, loss, deviation. NOMENCLATURE AR Aspect ratio (= h=c) ηT=T T/T isentropic efficiency (Eq. 18) c Chord ∆η Loss of efficiency CD Dissipation coefficient ρ Density Cd Discharge coefficient σ Solidity