Equations of Motion for a Translating Compound Pendulum
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 7. the Principle of Least Action
Chapter 7. The Principle of Least Action 7.1 Force Methods vs. Energy Methods We have so far studied two distinct ways of analyzing physics problems: force methods, basically consisting of the application of Newton’s Laws, and energy methods, consisting of the application of the principle of conservation of energy (the conservations of linear and angular momenta can also be considered as part of this). Both have their advantages and disadvantages. More precisely, energy methods often involve scalar quantities (e.g., work, kinetic energy, and potential energy) and are thus easier to handle than forces, which are vectorial in nature. However, forces tell us more. The simple example of a particle subjected to the earth’s gravitation field will clearly illustrate this. We know that when a particle moves from position y0 to y in the earth’s gravitational field, the conservation of energy tells us that ΔK + ΔUgrav = 0 (7.1) 1 2 2 m v − v0 + mg(y − y0 ) = 0, 2 ( ) which implies that the final speed of the particle, of mass m , is 2 v = v0 + 2g(y0 − y). (7.2) Although we know the final speed v of the particle, given its initial speed v0 and the initial and final positions y0 and y , we do not know how its position and velocity (and its speed) evolve with time. On the other hand, if we apply Newton’s Second Law, then we write −mgey = maey dv (7.3) = m e . dt y This equation is easily manipulated to yield t v = dv ∫t0 t = − gdτ + v0 (7.4) ∫t0 = −g(t − t0 ) + v0 , - 138 - where v0 is the initial velocity (it appears in equation (7.4) as a constant of integration). -

Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda
Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda • Introduction to the elastic pendulum problem • Derivations of the equations of motion • Real-life examples of an elastic pendulum • Trivial cases & equilibrium states • MATLAB models The Elastic Problem (Simple Harmonic Motion) 푑2푥 푑2푥 푘 • 퐹 = 푚 = −푘푥 = − 푥 푛푒푡 푑푡2 푑푡2 푚 • Solve this differential equation to find 푥 푡 = 푐1 cos 휔푡 + 푐2 sin 휔푡 = 퐴푐표푠(휔푡 − 휑) • With velocity and acceleration 푣 푡 = −퐴휔 sin 휔푡 + 휑 푎 푡 = −퐴휔2cos(휔푡 + 휑) • Total energy of the system 퐸 = 퐾 푡 + 푈 푡 1 1 1 = 푚푣푡2 + 푘푥2 = 푘퐴2 2 2 2 The Pendulum Problem (with some assumptions) • With position vector of point mass 푥 = 푙 푠푖푛휃푖 − 푐표푠휃푗 , define 푟 such that 푥 = 푙푟 and 휃 = 푐표푠휃푖 + 푠푖푛휃푗 • Find the first and second derivatives of the position vector: 푑푥 푑휃 = 푙 휃 푑푡 푑푡 2 푑2푥 푑2휃 푑휃 = 푙 휃 − 푙 푟 푑푡2 푑푡2 푑푡 • From Newton’s Law, (neglecting frictional force) 푑2푥 푚 = 퐹 + 퐹 푑푡2 푔 푡 The Pendulum Problem (with some assumptions) Defining force of gravity as 퐹푔 = −푚푔푗 = 푚푔푐표푠휃푟 − 푚푔푠푖푛휃휃 and tension of the string as 퐹푡 = −푇푟 : 2 푑휃 −푚푙 = 푚푔푐표푠휃 − 푇 푑푡 푑2휃 푚푙 = −푚푔푠푖푛휃 푑푡2 Define 휔0 = 푔/푙 to find the solution: 푑2휃 푔 = − 푠푖푛휃 = −휔2푠푖푛휃 푑푡2 푙 0 Derivation of Equations of Motion • m = pendulum mass • mspring = spring mass • l = unstreatched spring length • k = spring constant • g = acceleration due to gravity • Ft = pre-tension of spring 푚푔−퐹 • r = static spring stretch, 푟 = 푡 s 푠 푘 • rd = dynamic spring stretch • r = total spring stretch 푟푠 + 푟푑 Derivation of Equations of Motion -

Measuring Earth's Gravitational Constant with a Pendulum
Measuring Earth’s Gravitational Constant with a Pendulum Philippe Lewalle, Tony Dimino PHY 141 Lab TA, Fall 2014, Prof. Frank Wolfs University of Rochester November 30, 2014 Abstract In this lab we aim to calculate Earth’s gravitational constant by measuring the period of a pendulum. We obtain a value of 9.79 ± 0.02m/s2. This measurement agrees with the accepted value of g = 9.81m/s2 to within the precision limits of our procedure. Limitations of the techniques and assumptions used to calculate these values are discussed. The pedagogical context of this example report for PHY 141 is also discussed in the final remarks. 1 Theory The gravitational acceleration g near the surface of the Earth is known to be approximately constant, disregarding small effects due to geological variations and altitude shifts. We aim to measure the value of that acceleration in our lab, by observing the motion of a pendulum, whose motion depends both on g and the length L of the pendulum. It is a well known result that a pendulum consisting of a point mass and attached to a massless rod of length L obeys the relationship shown in eq. (1), d2θ g = − sin θ, (1) dt2 L where θ is the angle from the vertical, as showng in Fig. 1. For small displacements (ie small θ), we make a small angle approximation such that sin θ ≈ θ, which yields eq. (2). d2θ g = − θ (2) dt2 L Eq. (2) admits sinusoidal solutions with an angular frequency ω. We relate this to the period T of oscillation, to obtain an expression for g in terms of the period and length of the pendulum, shown in eq. -

Branched Hamiltonians and Supersymmetry
Branched Hamiltonians and Supersymmetry Thomas Curtright, University of Miami Wigner 111 seminar, 12 November 2013 Some examples of branched Hamiltonians are explored, as recently advo- cated by Shapere and Wilczek. These are actually cases of switchback poten- tials, albeit in momentum space, as previously analyzed for quasi-Hamiltonian dynamical systems in a classical context. A basic model, with a pair of Hamiltonian branches related by supersymmetry, is considered as an inter- esting illustration, and as stimulation. “It is quite possible ... we may discover that in nature the relation of past and future is so intimate ... that no simple representation of a present may exist.” – R P Feynman Based on work with Cosmas Zachos, Argonne National Laboratory Introduction to the problem In quantum mechanics H = p2 + V (x) (1) is neither more nor less difficult than H = x2 + V (p) (2) by reason of x, p duality, i.e. the Fourier transform: ψ (x) φ (p) ⎫ ⎧ x ⎪ ⎪ +i∂/∂p ⎪ ⇐⇒ ⎪ ⎬⎪ ⎨⎪ i∂/∂x p − ⎪ ⎪ ⎪ ⎪ ⎭⎪ ⎩⎪ This equivalence of (1) and (2) is manifest in the QMPS formalism, as initiated by Wigner (1932), 1 2ipy/ f (x, p)= dy x + y ρ x y e− π | | − 1 = dk p + k ρ p k e2ixk/ π | | − where x and p are on an equal footing, and where even more general H (x, p) can be considered. See CZ to follow, and other talks at this conference. Or even better, in addition to the excellent books cited at the conclusion of Professor Schleich’s talk yesterday morning, please see our new book on the subject ... Even in classical Hamiltonian mechanics, (1) and (2) are equivalent under a classical canonical transformation on phase space: (x, p) (p, x) ⇐⇒ − But upon transitioning to Lagrangian mechanics, the equivalence between the two theories becomes obscure. -
Appendix: Derivations
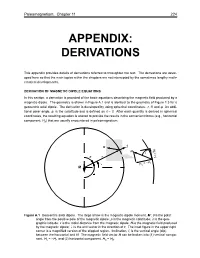
Paleomagnetism: Chapter 11 224 APPENDIX: DERIVATIONS This appendix provides details of derivations referred to throughout the text. The derivations are devel- oped here so that the main topics within the chapters are not interrupted by the sometimes lengthy math- ematical developments. DERIVATION OF MAGNETIC DIPOLE EQUATIONS In this section, a derivation is provided of the basic equations describing the magnetic field produced by a magnetic dipole. The geometry is shown in Figure A.1 and is identical to the geometry of Figure 1.3 for a geocentric axial dipole. The derivation is developed by using spherical coordinates: r, θ, and φ. An addi- tional polar angle, p, is the colatitude and is defined as π – θ. After each quantity is derived in spherical coordinates, the resulting equation is altered to provide the results in the convenient forms (e.g., horizontal component, Hh) that are usually encountered in paleomagnetism. H ^r H H h I = H p r = –Hr H v M Figure A.1 Geocentric axial dipole. The large arrow is the magnetic dipole moment, M ; θ is the polar angle from the positive pole of the magnetic dipole; p is the magnetic colatitude; λ is the geo- graphic latitude; r is the radial distance from the magnetic dipole; H is the magnetic field produced by the magnetic dipole; rˆ is the unit vector in the direction of r. The inset figure in the upper right corner is a magnified version of the stippled region. Inclination, I, is the vertical angle (dip) between the horizontal and H. The magnetic field vector H can be broken into (1) vertical compo- nent, Hv =–Hr, and (2) horizontal component, Hh = Hθ . -

Rotational Motion of Electric Machines
Rotational Motion of Electric Machines • An electric machine rotates about a fixed axis, called the shaft, so its rotation is restricted to one angular dimension. • Relative to a given end of the machine’s shaft, the direction of counterclockwise (CCW) rotation is often assumed to be positive. • Therefore, for rotation about a fixed shaft, all the concepts are scalars. 17 Angular Position, Velocity and Acceleration • Angular position – The angle at which an object is oriented, measured from some arbitrary reference point – Unit: rad or deg – Analogy of the linear concept • Angular acceleration =d/dt of distance along a line. – The rate of change in angular • Angular velocity =d/dt velocity with respect to time – The rate of change in angular – Unit: rad/s2 position with respect to time • and >0 if the rotation is CCW – Unit: rad/s or r/min (revolutions • >0 if the absolute angular per minute or rpm for short) velocity is increasing in the CCW – Analogy of the concept of direction or decreasing in the velocity on a straight line. CW direction 18 Moment of Inertia (or Inertia) • Inertia depends on the mass and shape of the object (unit: kgm2) • A complex shape can be broken up into 2 or more of simple shapes Definition Two useful formulas mL2 m J J() RRRR22 12 3 1212 m 22 JRR()12 2 19 Torque and Change in Speed • Torque is equal to the product of the force and the perpendicular distance between the axis of rotation and the point of application of the force. T=Fr (Nm) T=0 T T=Fr • Newton’s Law of Rotation: Describes the relationship between the total torque applied to an object and its resulting angular acceleration. -

The Lagrangian and Hamiltonian Mechanical Systems
THE LAGRANGIAN AND HAMILTONIAN MECHANICAL SYSTEMS ALEXANDER TOLISH Abstract. Newton's Laws of Motion, which equate forces with the time- rates of change of momenta, are a convenient way to describe mechanical systems in Euclidean spaces with cartesian coordinates. Unfortunately, the physical world is rarely so cooperative|physicists often explore systems that are neither Euclidean nor cartesian. Different mechanical formalisms, like the Lagrangian and Hamiltonian systems, may be more effective at describing such phenomena, as they are geometric rather than analytic processes. In this paper, I shall construct Lagrangian and Hamiltonian mechanics, prove their equivalence to Newtonian mechanics, and provide examples of both non- Newtonian systems in action. Contents 1. The Calculus of Variations 1 2. Manifold Geometry 3 3. Lagrangian Mechanics 4 4. Two Electric Pendula 4 5. Differential Forms and Symplectic Geometry 6 6. Hamiltonian Mechanics 7 7. The Double Planar Pendulum 9 Acknowledgments 11 References 11 1. The Calculus of Variations Lagrangian mechanics applies physics not only to particles, but to the trajectories of particles. We must therefore study how curves behave under small disturbances or variations. Definition 1.1. Let V be a Banach space. A curve is a continuous map : [t0; t1] ! V: A variation on the curve is some function h of t that creates a new curve +h.A functional is a function from the space of curves to the real numbers. p Example 1.2. Φ( ) = R t1 1 +x _ 2dt, wherex _ = d , is a functional. It expresses t0 dt the length of curve between t0 and t1. Definition 1.3. -

Celestial Coordinate Systems
Celestial Coordinate Systems Craig Lage Department of Physics, New York University, [email protected] January 6, 2014 1 Introduction This document reviews briefly some of the key ideas that you will need to understand in order to identify and locate objects in the sky. It is intended to serve as a reference document. 2 Angular Basics When we view objects in the sky, distance is difficult to determine, and generally we can only indicate their direction. For this reason, angles are critical in astronomy, and we use angular measures to locate objects and define the distance between objects. Angles are measured in a number of different ways in astronomy, and you need to become familiar with the different notations and comfortable converting between them. A basic angle is shown in Figure 1. θ Figure 1: A basic angle, θ. We review some angle basics. We normally use two primary measures of angles, degrees and radians. In astronomy, we also sometimes use time as a measure of angles, as we will discuss later. A radian is a dimensionless measure equal to the length of the circular arc enclosed by the angle divided by the radius of the circle. A full circle is thus equal to 2π radians. A degree is an arbitrary measure, where a full circle is defined to be equal to 360◦. When using degrees, we also have two different conventions, to divide one degree into decimal degrees, or alternatively to divide it into 60 minutes, each of which is divided into 60 seconds. These are also referred to as minutes of arc or seconds of arc so as not to confuse them with minutes of time and seconds of time. -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy. -

Conservation of Linear Momentum: the Ballistic Pendulum
Conservation of Linear Momentum: the Ballistic Pendulum I. Discussion a. Determination of Velocity from Collision In the typical use made of a ballistic pendulum, a projectile, having a small mass, m, and a horizontal velocity, v, strikes and imbeds itself in a pendulum bob, having a large mass, M, and an initial horizontal velocity of zero. Immediately after the collision occurs the combined mass, M + m, of the bob and projectile has a small horizontal velocity, V. During this collision the conservation of linear momentum holds. If rotational effects are ignored, and if it is assumed that the time required for this event to take place is too short to allow the projectile to be substantially influenced by the earth's gravitational field, the motion remains horizontal, and mv = ( M + m ) V (1) After the collision has occurred, the combined mass, (M + m), rises along a circular arc to a vertical height h in the earth's gravitational field, as shown in Fig. l (c). During this portion of the motion, but not during the collision itself, the conservation of energy holds, if it is assumed that the effects of friction are negligible. Then, for motion along the arc, 1 2 ( M + m ) V = ( M + m) gh , or (2) 2 V = 2 gh (3) When V is eliminated using equations 1 and 3, the velocity of the projectile is v = M + m 2 gh (4) m b. Determination of Velocity from Range When a projectile, having an initial horizontal velocity, v, is fired from a height H above a plane, its horizontal range, R, is given by R = v t x o (5) and the height H is given by 1 2 H = gt (6) 2 where t = time during which projectile is in flight. -

Leonhard Euler - Wikipedia, the Free Encyclopedia Page 1 of 14
Leonhard Euler - Wikipedia, the free encyclopedia Page 1 of 14 Leonhard Euler From Wikipedia, the free encyclopedia Leonhard Euler ( German pronunciation: [l]; English Leonhard Euler approximation, "Oiler" [1] 15 April 1707 – 18 September 1783) was a pioneering Swiss mathematician and physicist. He made important discoveries in fields as diverse as infinitesimal calculus and graph theory. He also introduced much of the modern mathematical terminology and notation, particularly for mathematical analysis, such as the notion of a mathematical function.[2] He is also renowned for his work in mechanics, fluid dynamics, optics, and astronomy. Euler spent most of his adult life in St. Petersburg, Russia, and in Berlin, Prussia. He is considered to be the preeminent mathematician of the 18th century, and one of the greatest of all time. He is also one of the most prolific mathematicians ever; his collected works fill 60–80 quarto volumes. [3] A statement attributed to Pierre-Simon Laplace expresses Euler's influence on mathematics: "Read Euler, read Euler, he is our teacher in all things," which has also been translated as "Read Portrait by Emanuel Handmann 1756(?) Euler, read Euler, he is the master of us all." [4] Born 15 April 1707 Euler was featured on the sixth series of the Swiss 10- Basel, Switzerland franc banknote and on numerous Swiss, German, and Died Russian postage stamps. The asteroid 2002 Euler was 18 September 1783 (aged 76) named in his honor. He is also commemorated by the [OS: 7 September 1783] Lutheran Church on their Calendar of Saints on 24 St. Petersburg, Russia May – he was a devout Christian (and believer in Residence Prussia, Russia biblical inerrancy) who wrote apologetics and argued Switzerland [5] forcefully against the prominent atheists of his time. -

Fluid Mechanics 2 Course Code MPEG222 Second Semester Fall 2019/2020 by Dr
South valley University Faculty of Engineering Mechanical Power Engineering Dep. Fluid Mechanics 2 Course Code MPEG222 Second Semester Fall 2019/2020 By Dr. Eng./Ahmed Abdelhady Mobile: 01118501269 Email: [email protected] Review of Rotational Motion and Angular Momentum The motion of a rigid body can be considered to be the combination of the: ➢ Translational motion of its center of mass and, The translational motion can be analyzed using the linear momentum equation. ➢ Rotational motion about its center of mass. all points in the body move in circles about the axis of rotation. The amount of rotation of a point in a body is expressed in terms of the angle θ swept by a line of length r that connects the point to the axis of rotation and is perpendicular to the axis. The physical distance traveled by a point along its circular path is l = θr, where r is the normal distance of the point from the axis of rotation and θ is the angular distance in rad. Note that 1 rad corresponds to 360/(2π) = 57.3°. V is the linear velocity and at is the linear acceleration in the tangential direction for a point located at a distance r from the axis of rotation. Newton’s second law requires that there must be a force acting in the tangential direction to cause angular acceleration. The strength of the rotating effect, called the moment or torque, is proportional to the magnitude of the force and its distance from the axis of rotation. ➢ I is the moment of inertia of the body about the axis of rotation Note that: ➢ The linear momentum of a body of mass m having a velocity V is mV, and the direction of linear momentum is identical to the direction of velocity.