Modeling and Control of an Automated Manual Transmission for Ecocar 3 Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Actuator Product Guide
About Moog Multi-purpose Actuators and Servoactuators Moog’s multi-purpose actuators and servoactuators can be used for a variety of high performance applications and are standard building blocks used in ruggedized systems. We utilize our expertise in DC electromagnetics, gearing, rate and position loop servo electronics and mechanical design in these assemblies. Moog rotary and linear electromechancial actuators are used in: • Fixed and Rotary Wing Aircrafts • Unmanned Vehicles / Remotely Operated Vehicles • Ground Vehicles • Radar Systems • Remote Weapon Stations • SATCOM Pedestals • EO / IR Sensor Pods • Cockpit Door Locks • Valve / Damper Actuators Capability Moog has been developing specialized high technology and utility electromechanical actuators for over 25 years. Our capability includes in-house design, manufacturing expertise, engineering support and qualification for these products. Product Range Products range from 25 to 2,500 in-lbt for rotary and 100 to 2,000 lbf for linear configurations. We can offer our assemblies with integral servo control electronics. Moog offers a variety of communication interfaces including analog, (+/- 10 VDC for example), RS232 / 422 / 485, R/C PWM and CAN Bus. We design for redundancy as required by the customer. Moog is a FAA certified repair station and can offer hardware in support of AOG services. FAA / EASA Approved Repair Station Location, Springfield, PA FAA Repair Station: L17R251Y 750 West Sproul Road EASA (JAA): 145.5497 Springfield, PA 19064-4084 USA Cage Code: 1K426 Tel: +1-610-328-4000 Fax: +1-610-605-6216 FAA / EASA Approved Repair Station Location, Blacksburg, VA FAA Repair Station: 21MR057C 1213 North Main Street Cage Code: 99932 Blacksburg VA 24060-3127 USA Tel: +1-540-552-3011 Fax: +1-540-557-6719 2 Moog • www.moog.com Rotary Actuators Rotary Actuators Rotary servoactuators utilize brush and brushless type DC motors using both neodymium and rare earth magnets. -

Modern Design and Control of Automatic Transmission and The
Review Paper doi:10.5937/jaes13-7727 Paper number: 13(2015)1, 313, 51 - 59 MODERN DESIGN AND CONTROL OF AUTOMATIC TRANSMISSION AND THE PROSPECTS OF DEVELOPMENT Dejan Matijević The School of Electrical and Computer Engineering of Applied Studies, Belgrade, Serbia Ivan Ivanković* University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia Dr Vladimir Popović University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia The paper provides an overview of modern technical solutions of automatic transmissions in auto- motive industry with their influence on sustainable development. The objective of the first section is a structural view of specific constructions and control systems of presently used automatic transmis- sions, with emphasis on mechatronics implementation. The second section is based on perspectives of development, by integrating some branches of soft computing, such as fuzzy logic and artificial neural networks in order to create an optimal control algorithm for obtaining a contribution to fuel economy, exhaust emission, comfort and vehicle performance. Key words: Automatic transmission, Mechatronics, Automotive industry, Soft Computing INTRODUCTION which is depended by coefficient of friction and normal load on the drive axle. Lower limitation Almost all automobiles in use today are driven by is defined by maximal speed that vehicle can internal combustion engines, which are charac- reach. Shaded areas between traction forces terized by many advantages, such as relatively through gears are power losses. To decrease good efficiency, relatively compact energy stor- power losses and to be as closely as possible age and high power – to – weight ratio [07]. to the ideal traction hyperbola, the gearbox with But, fundamental disadvantages are: enough gear ratios is needed. -

Heavy Duty Automatic Transmission & Power Steering Fluid X-Changers
R Transmission fluid (inline or dipstick) and power steering fluid exchanging capabilities! Heavy Duty Automatic Transmission & Power Steering Fluid X-Changers P/N: 98018 P/N: 98020 P/N: 98019 P/N: 98021 TRANSMISSION (INLINE) TRANSMISSION (INLINE) TRANSMISSION TRANSMISSION (INLINE or Transmission fluid & POWER STEERING FLUID (INLINE or DIPSTICK) DIPSTICK) & POWER STEERING exchange through vehicle’s Multi-function service, Multi-method transmission Multi-function service, transmission cooler lines transmission fluid exchange fluid exchange: inline or transmission fluid exchange or patented integrated through the dipstick (inline or dipstick) or power steering exchange patented integrated power steering exchange ALL MACHINES INCLUDE: • Ability to select any fluid exchange • Large 2.5 GPM pump able to handle anything • Patented electronic measuring technology amount from 1 - 35 quarts from low-flow vehicles to trucks & buses • Fluid totalizer • Patented electronic measuring technology • ADD and REMOVE fluid features • Power loss memory • Fully interactive LCD control panel • SWITCH HOSES indicator & the • Pause function shows the technician everything going ability to switch flow direction on, taking out all the guesswork with the push of a button • Large 35 quart tanks 943067 2600 Jeanwood Drive • Elkhart, IN 46514 • Phone: 574-262-3400 • Toll Free: 800-303-5874 • www.flodynamics.com NEW Easy To Use LCD Control Panel! PERFORMANCE-DRIVEN HEAVY DUTY AUTOMATIC TRANSMISSION & POWER STEERING FLUID X-CHANGER BENEFITS Accurate sensor technology allows optimum fluid level to be maintained in vehicle’s transmission. Two in-line 22-micron absolute 1 2 3 + fluid filters capture microscopic ABC DEF ADD particles and contaminants. 4 5 6 _ Easy to use adapters allow quick hookup GHI JKL MNO REMOVE to virtually any automobile make and 7 8 9 model, saving time and money. -

Safety Warnings
SAFETY INFORMATION Doc ID: 192-297A Doc Revision: 010418 Improper installation, service or maintenance of this product can cause death, serious injury, and/or property damage. • Only a trained and qualified mechanic should install this product. • Read these directions thoroughly before installation. • For assistance or additional information, please call Rekluse Motor Sports. Failure to become familiar with Rekluse auto clutch operation before use can cause death, serious injury, and/or property damage. • Completely familiarize yourself with the operation of the Rekluse auto clutch. • Do NOT allow anyone unfamiliar with the operation of the Rekluse auto clutch to operate a Rekluse auto clutch equipped motorcycle. • Do NOT attempt to ride a Rekluse auto clutch equipped motorcycle on public roads until you are completely familiarized with the operation of this product. • First practice riding Rekluse auto clutch equipped motorcycles in a safe area free of obstructions. A Rekluse auto clutch can engage suddenly and cause death, serious injury, and/or property damage. Loss of control can result from sudden and unexpected engagement of the clutch from a free-wheeling state. Rear tire may slow from the engine's compression braking effect and cause the rear tire to skid. • Always select a suitable transmission gear for your ground speed, engine RPM and terrain. • Release the clutch lever slowly and apply a small amount of throttle to control engine compression braking after downshifting. See installation and/or user’s guide for more information about free-wheeling. Rekluse auto clutch can make your motorcycle appear to be in neutral when in gear, even when the engine is running and clutch lever released. -

Mission CO2 Reduction: the Future of the Manual Transmission: Schaeffler
56 57 Mission CO2 Reduction The future of the manual transmission N X D H I O E A S M I O U E N L O A N G A D F J G I O J E R U I N K O P J E W L S P N Z A D F T O I E O H O I O O A N G A D F J G I O J E R U I N K O P O A N G A D F J G I O J E R A N P D H I O E A S M I O U E N L O A N G A D F O I E R N G M D S A U K Z Q I N K J S L O G D W O I A D U I G I R Z H I O G D N O I E R N G M D S A U K N M H I O G D N O I E R N G U O I E U G I A F E D O N G I U A M U H I O G D V N K F N K K R E W S P L O C Y Q D M F E F B S A T B G P D R D D L R A E F B A F V N K F N K R E W S P D L R N E F B A F V N K F N W F I E P I O C O M F O R T O P S D C V F E W C G M J B J B K R E W S P L O C Y Q D M F E F B S A T B G P D B D D L R B E Z B A F V R K F N K R E W S P Z L R B E O B A F V N K F N J V D O W R E Q R I U Z T R E W Q L K J H G F D G M D S D S B N D S A U K Z Q I N K J S L W O I E P JürgenN N B KrollA U A H I O G D N P I E R N G M D S A U K Z Q H I O G D N W I E R N G M D G G E E A Y W T R D E E S Y W A T P H C E Q A Y Z Y K F K F S A U K Z Q I N K J S L W O Q T V I E P MarkusN Z R HausnerA U A H I R G D N O I Q R N G M D S A U K Z Q H I O G D N O I Y R N G M D T C R W F I J H L M L K N I J U H B Z G V T F C A K G E G E F E Q L O P N G S A Y B G D S W L Z U K RolandO G I SeebacherK C K P M N E S W L N C U W Z Y K F E Q L O P P M N E S W L N C T W Z Y K W P J J V D G L E T N O A D G J L Y C B M W R Z N A X J X J E C L Z E M S A C I T P M O S G R U C Z G Z M O Q O D N V U S G R V L G R M K G E C L Z E M D N V U S G R V L G R X K G K T D G G E T O -

An Overview of Novel Actuators for Soft Robotics
actuators Review An Overview of Novel Actuators for Soft Robotics Pinar Boyraz 1,2,* ID , Gundula Runge 3 and Annika Raatz 3 1 Mechanics and Maritime Sciences Department, Chalmers University of Technology, 41296 Gothenburg, Sweden 2 Mechanical Engineering Department, Istanbul Technical University, Istanbul 34437, Turkey 3 Institut fur Montagetechnik (match), Leibniz Universität Hannover, 30823 Garbsen, Hannover, Germany; [email protected] (G.R.); [email protected] (A.R.) * Correspondence: [email protected]; Tel.: +46-730-49-8780 Received: 10 June 2018; Accepted: 9 August 2018; Published: 16 August 2018 Abstract: In this systematic survey, an overview of non-conventional actuators particularly used in soft-robotics is presented. The review is performed by using well-defined performance criteria with a direction to identify the exemplary and potential applications. In addition to this, initial guidelines to compare the performance and applicability of these novel actuators are provided. The meta-analysis is restricted to five main types of actuators: shape memory alloys (SMAs), fluidic elastomer actuators (FEAs), shape morphing polymers (SMPs), dielectric electro-activated polymers (DEAPs), and magnetic/electro-magnetic actuators (E/MAs). In exploring and comparing the capabilities of these actuators, the focus was on eight different aspects: compliance, topology-geometry, scalability-complexity, energy efficiency, operation range, modality, controllability, and technological readiness level (TRL). The overview presented here provides a state-of-the-art summary of the advancements and can help researchers to select the most convenient soft actuators using the comprehensive comparison of the suggested quantitative and qualitative criteria. Keywords: soft-robotics; actuator performance; SMA; SMP; FEA; DEAP; E/MA 1. -

Exlar Electric Test and Simulation Actuator Systems
Delivering more accurate and trouble-free test actuators. Exlar Electric Test and Simulation Actuator Systems Courtesy of Steven Engineering, Inc. - 230 Ryan Way, South San Francisco, CA 94080-5370 - Main Office: (650) 588-9200 - Outside Local Area: (800) 258-9200 - www.stevenengineering.com entertainment simulators, Exlar actutors are Paradigm Shift ergonomic endurance directly controlled in Mechanical test equipment, geo- by the system’s logical test equipment, electric servo Testing System wear testing, and even amplifi er. No Technology aircraft structural testing intermediary such and dynamic simulation. as oil or air is required to create Historically, manufacturers and motion. System users of mechanical test ap- The Benefi ts compliance result- paratus and motion simulators ing from use of have accepted the inaccuracies, of All-Electric fl uid power is a inconvenience and high mainte- Test Actuator major contributor nance costs of hydraulic actua- to inaccuracy of tion. However, today’s simula- Systems tors and test stands are often hydraulic actua- Exlar’s patented roller used in environments where tor systems. The screw linear actuator contamination from oil leaks is higher stiffness of technology allows users to not permissable and greater ac- a planetary perform the analysis and testing curacy is required. Exlar offers roller screw-based actuator pro- needed to verify products’ de- a full range of all-electric test vides greater system response actuators and position controls signs without the high cost of in- and stability assuring precise which provide the dynamic per- stallation, constant maintenance, and crisp control, and stiffness formance and long life required environmental issues, and en- is not stroke-sensitive. -

5-Speed Manual Transmission Again, Or by Turning the Ignition Do Not Rest Your Foot on the Clutch the Transmission Has Five Fully Key to the "OFF" Position
5-Speed Manual Transmission again, or by turning the ignition Do not rest your foot on the clutch The transmission has five fully key to the "OFF" position. pedal while driving; this can synchronized forward speeds. The cause the clutch to slip, resulting gear shift pattern is provided on Operation of the "WINTER" in damage to the clutch. mode should be limited to the transmission lever knob. The slippery road conditions only. backup lights turn on when When you are stopped on an Operation of the "WINTER" shifted into the reverse gear. upgrade, do not hold the vehicle mode during normal driving in place by letting the clutch pedal conditions will cause decreased up part-way. Use the foot brake or performance and sluggish the parking brake. acceleration. Never shift into reverse gear until the vehicle is completely stopped. Do not "over-speed" the engine when shifting down to a lower gear. The shift lever cannot be shifted directly from fifth gear into Reverse. When shifting into Reverse gear from fifth gear, Driving Tips depress the clutch pedal and shift completely into Neutral position, Always depress and release the then shift into Reverse gear. clutch pedal fully when shifting. Instruments and Controls Shift Speed Chart For cruising, choose the highest Transfer Control gear for that speed (cruising speed The lower gears of the 4WD Models is defined as a relatively constant transmission are used for normal The "4WD" indicator light speed operation). acceleration of the vehicle to the illuminates when 4WD is engaged desired cruising speed. The The upshift indicator (U/S) lights with the 4WD-2WD switch. -

Analysis and Simulation of a Torque Assist Automated Manual Transmission
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by PORTO Publications Open Repository TOrino Post print (i.e. final draft post-refereeing) version of an article published on Mechanical Systems and Signal Processing. Beyond the journal formatting, please note that there could be minor changes from this document to the final published version. The final published version is accessible from here: http://dx.doi.org/10.1016/j.ymssp.2010.12.014 This document has made accessible through PORTO, the Open Access Repository of Politecnico di Torino (http://porto.polito.it), in compliance with the Publisher's copyright policy as reported in the SHERPA- ROMEO website: http://www.sherpa.ac.uk/romeo/issn/0888-3270/ Analysis and Simulation of a Torque Assist Automated Manual Transmission E. Galvagno, M. Velardocchia, A. Vigliani Dipartimento di Meccanica - Politecnico di Torino C.so Duca degli Abruzzi, 24 - 10129 Torino - ITALY email: [email protected] Keywords assist clutch automated manual transmission power-shift transmission torque gap filler drivability Abstract The paper presents the kinematic and dynamic analysis of a power-shift Automated Manual Transmission (AMT) characterised by a wet clutch, called Assist-Clutch (ACL), replacing the fifth gear synchroniser. This torque-assist mechanism becomes a torque transfer path during gearshifts, in order to overcome a typical dynamic problem of the AMTs, that is the driving force interruption. The mean power contributions during gearshifts are computed for different engine and ACL interventions, thus allowing to draw considerations useful for developing the control algorithms. The simulation results prove the advantages in terms of gearshift quality and ride comfort of the analysed transmission. -
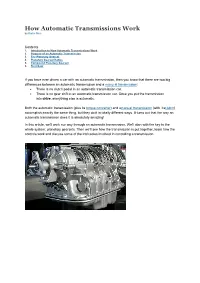
How Automatic Transmissions Work by Karim Nice
How Automatic Transmissions Work by Karim Nice Contents 1. Introduction to How Automatic Transmissions Work 2. Purpose of an Automatic Transmission 3. The Planetary Gearset 4. Planetary Gearset Ratios 5. Compound Planetary Gearset 6. First Gear If you have ever driven a car with an automatic transmission, then you know that there are two big differences between an automatic transmission and a manu al transmission: There is no clutch pedal in an automatic transmission car. There is no gear shift in an automatic transmission car. Once you put the transmission into drive, everything else is automatic. Both the automatic transmission (plus its torque converter) and amanual transmission (with itsclutch) accomplish exactly the same thing, but they do it in totally different ways. It turns out that the way an automatic transmission does it is absolutely amazing! In this article, we'll work our way through an automatic transmission. We'll start with the key to the whole system: planetary gearsets. Then we'll see how the transmission is put together, learn how the controls work and discuss some of the intricacies involved in controlling a transmission. Purpose of an Automatic Transmission Location of the automatic transmission. Just like that of a manual transmission, the automatic transmission's primary job is to allow the engine to operate in its narrow range of speeds while providing a wide range of output speeds. Without a transmission, cars would be limited to one gear ratio, and that ratio would have to be selected to allow the car to travel at the desired top speed. -

Variable Automatic Gearbox Multitronic 01J Self
228 228 Service. Variable Automatic Gearbox multitronic® 01J Design and Function Self-Study Programme 228 All rights reserved. Technical specifications subject to change without notice. AUDI AG Dept. I/VK-5 D-85045 Ingolstadt Fax +49 (0)841/89-36367 940.2810.47.20 Technical status: 09/99 Printed in Germany For internal use only multitronic® The name multitronic® stands for the new The CVT concept improved by Audi is based variable automatic gearbox developed by on the long-established principle of the Audi. “chain drive transmission”. According to this The variable automatic gearbox is commonly principle, the reduction ratio between the known as the CVT gearbox. shortest and the longest ratio can be controlled steplessly by means of a so-called “variator”. CVT is the English abbreviation for “Continuously Variable Transmission”. 228_023 The new Audi multitronic® with Tiptronic function offers a synergy of the best possible dynamics, optimal fuel utilisation and the highest possible level of drive comfort. 2 Contents Page Introduction multitronic® ............................................................................ 2 The gearbox concept .............................................................. 9 Specifications ........................................................................10 Gearbox modules The flywheel damper unit .................................................... 11 Sectional view of gearbox ....................................................13 The forward clutch/reverse clutch with planetary gear train .................................................... -

Clutch/Brake Packages Section F
Clutch/Brake Packages Section F CBC Clutch/Brake Combination ............................................................................................................................................. 203 Dimensional and Technical Data ................................................................................................................................................. 205 FSPA Packages Description .................................................................................................................................................... 213 Dimensional and Technical Data ................................................................................................................................................ 215 AMCB AccuStop Description .................................................................................................................................................. 223 Dimensional and Technical Data ................................................................................................................................................ 225 21 DCB Clutch/Brake Description .......................................................................................................................................... 227 Dimensional and Technical Data ................................................................................................................................................ 228 202 EATON Airflex® Clutches & Brakes 10M1297GP November 2012 CBC Clutch/Brake Combination CBC Clutch/Brake