Harvesting Mechanical Vibrations Using a Frequency Up-Converter
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
DC Uncontrolled Rectifier by Using Phase- Shifting Transformer
University of Halabja (UoH) College of Science Physics Department Undergraduate’s Last year Project 2020-2021 ‘’Harmonics Cancellation from AC- DC Uncontrolled Rectifier by using Phase- Shifting Transformer.’’ Prepared by: Supervised by: Shilan Ali Faraj Mr .Farhad Muhsin Mahmood Bushra Ahmad Abdulla Nada Jaba Hassan 1 [‘’Harmonics Cancellation from AC- DC Uncontrolled Rectifier by using Phase-Shifting Transformer.’’] By Shilan Ali Faraj Bushra Ahmad Abdulla Nada Jaba Hassan A thesis submitted to the College of Science, University of Halabja In partial fulfillment of the requirements For the degree of Bachelor of Physics Graduate Program in Physics Written under the direction of [Mr. Farhad M. Mahmood] [May, 2021] 2 Contents Abstract ......................................................................................................................................................... 4 Chapter one (History and background) ........................................................................................................ 5 Background and history of Rectifier. ........................................................................................................ 5 1.1 Rectifier : ............................................................................................................................................. 5 1.2. Inverter :............................................................................................................................................. 7 Chapter two (introduction) ........................................................................................................................ -
Electrical Energy Utilisation
Jacek F. Gieras Izabella A.Gieras Electrical Energy Utilisation Wydawnictwo Adam Marszalek Contents Preface ........................................................VII 1 ENERGY AND DRIVES .................................. 1 1.1 Electrical energy . 1 1.2 Conservation of electrical energy . 2 1.3 Classification of electric motors . 4 1.4 Applications of electric motor drives . 5 1.5 Trends in the electric-motor and drives industry . 11 1.6 How many motors are used in affluent homes ? . 11 1.7 Fundamentals of mechanics of machines . 12 1.7.1 Torque and power . 12 1.7.2 Simple gear trains . 12 1.7.3 Efficiency of a gear train . 14 1.7.4 Equivalent moment of inertia . 14 1.8 Torque equation . 18 1.9 Mechanical characteristics of machines . 19 Problems . 21 2 D.C. MOTORS ............................................ 23 2.1 Construction . 23 2.2 Fundamental equations. 24 2.2.1 Terminal voltage . 24 2.2.2 Armature winding EMF . 25 2.2.3 Magnetic flux . 25 2.2.4 Electromagnetic (developed) torque . 25 2.2.5 Electromagnetic power . 26 2.2.6 Rotor and commutator linear speed . 26 2.2.7 Input and output power . 26 2.2.8 Losses . 27 2.2.9 Armature line current density . 28 2.3 D.c. shunt motor . 28 VI Contents 2.4 D.c. series motor . 30 2.5 Compound-wound motor . 31 2.6 Starting . 32 2.7 Speed control of d.c. motors . 34 2.8 Braking . 36 2.8.1 Braking a shunt d.c. motor . 37 2.8.2 Braking a series d.c. motor . 37 2.9 Permanent magnet d.c. -
GE Multilin Technical Note
Digital Energy Multilin GE Multilin technical note Power system device function numbers GE publication number: GET-8541A Copyright © 2010 GE Multilin Power system device function numbers This document provides a list of power system device function numbers used in GE Multilin publications and products. This document consists of three parts: 1. Device function numbers. 2. Device function acronyms. 3. Device number suffixes. The device number list has been updated to reflect changes to the IEEE PC37.2-2008 standard. Device function numbers Device function numbers 1 through 94 are described below. Devices 95 to 99 are used only for specific applications in individual installations where none of the assigned numbered functions from 1 to 94 are suitable. Letters and numbers may be used as suffixes to device function numbers to provide a more specific definition of the function. Suffixes should, however, be used only when they accomplish a useful purpose. Master element 1 A master element is the initiating device, such as a control switch, voltage relay, float switch, etc., which serves either directly or through such permissive devices as protective and time-delay relays to place an equipment in or out of operation. Time delay starting or closing relay 2 A time delay starting or closing relay functions to give a desired amount of time delay before or after any point of operation in a switching sequence or protective relay system, except as specifically provided by device functions 48, 62, and 79. GE MULTILIN TECHNICAL NOTE – DEVICE FUNCTION NUMBERS 1 Checking or interlocking relay 3 A checking or interlocking relay operates in response to the position of a number of other devices (or to a number of predetermined conditions) in an equipment, to allow an operating sequence to proceed, or to stop, or to provide a check of the position of these devices or of these conditions for any purpose. -

High-Efficiency Low-Voltage Rectifiers for Power Scavenging Systems
UNIVERSITÉ DE MONTRÉAL High-Efficiency Low-Voltage Rectifiers for Power Scavenging Systems SEYED SAEID HASHEMI AGHCHEH BODY DÉPARTEMENT DE GÉNIE ÉLECTRIQUE ÉCOLE POLYTECHNIQUE DE MONTRÉAL THÉSE PRÉSENTÉE EN VUE DE L’OBTENTION DU DIPLÔME DE PHILOSOPHIAE DOCTOR (PH.D.) (GÉNIE ÉLECTRIQUE) AOȖT 2011 © Seyed Saeid Hashemi Aghcheh Body, 2011. UNIVERSITÉ DE MONTRÉAL ÉCOLE POLYTECHNIQUE DE MONTRÉAL Cette Thèse intitulée: High-Efficiency Low-Voltage Rectifiers for Power Scavenging Systems Présentée par : HASHEMI AGHCHEH BODY Seyed Saeid en vue de l’obtention du diplôme de : Philosophiae Doctor a été dûment accepté par le jury d’examen constitué de : M. AUDET Yves, Ph. D., président M. SAWAN Mohamad, Ph. D., membre et directeur de recherche M. SAVARIA Yvon, Ph. D., membre et codirecteur de recherche M. BRAULT Jean-Jules, Ph. D., membre M. SHAMS Maitham, Ph. D., membre externe iii DEDICATION Dedicated to my parents And To my wife and sons iv ACKNOWLEDGEMENTS My thanks are due, first and foremost, to my supervisor, Professor Mohamad Sawan, for his patient guidance and support during my long journey at École Polytechnique de Montréal. It was both an honor and a privilege to work with him. His many years of circuit design experience in biomedical applications have allowed me to focus on the critical and interesting issues. I would like to also thank Professor Yvon Savaria, whom I enjoyed the hours of friendly and stimulating t echnical di scussions. H is i nsightful c omments, s upport, a nd t imely advice w as instrumental throughout the course of this work. He has been an invaluable source of help for my thesis and all the other submitted papers for publication. -
View of the High Transmission Losses Incurred in R-F Cables at Microwave Frequencies, the Preferred Detector Location Is at the Antenna
INSTRUMENTATION FOR MICROWAVE FIELD MEASUREMENTS DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University by Jack Bacon, B .E .E ., M.Sc. The Ohio State University I960 Approved by d . ___ Adviser Department of Electrical Engineering ACKNOWLEDGMENT Because the research reported here has extended over such a long interval of time, it is difficult to acknowledge all the individuals who have contributed to its success. In particular, the most valu able technical suggestions have been given by Professors R. L. Cos griff, T. E. Tice, and F. C. Weimer. Although the advice of R. A. Fouty was of a different kind, it has been no less valuable. In the beginning he pointed out several areas where contributions could be made to advantage. His suggestions, which came when the writer was unfamiliar with the field of endeavor, proved to be in valuable. No acknowledgment could be complete without recognizing the contributions made by the supporting staff of the Antenna Laboratory. This includes particularly the drafting and editorial personnel. Specifically, without the willingness of Miss Dorothy McGinty and Mrs. Barbara Kerwood to work long hours of overtime beyond the call of duty the preparation of this manuscript in completed form would have been impossible in the allotted time. The encourage ment of my collegues and the forbearance of my wife has been no less a factor in the completion of this dissertation. The research reported herein was sponsored in part by the Air Research and Development Command, Wright-Patterson Air Force Base, Ohio, under contracts with the Ohio State University Research Foundation. -

The Extent and Development of Machine-Electronics
The extent and development of machine-electronics Citation for published version (APA): Wyk, van, J. D. (1968). The extent and development of machine-electronics. Technische Hogeschool Eindhoven. Document status and date: Published: 01/01/1968 Document Version: Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal. If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, please follow below link for the End User Agreement: www.tue.nl/taverne Take down policy If you believe that this document breaches copyright please contact us at: [email protected] providing details and we will investigate your claim. -

Www . Electricalpartmanuals
Westinghouse Electric Corporation Technical Data Relay and Telecommunications Division 41-060 Coral Springs, FL 33065 Page 1 com April, 1987 Selections from ANSI C37.2-1970 Supersedes 41-060 T WE A IEEE Device Numbers pages 1-8, dated February 4, 1975 . E, D, C/41-000A and Functions For Switchgear Apparatus The devices 1n switching equipments are re- Device Definition Device Definition ferred to by numbers, with appropriate suff1x Number and Function Number and Function letters when necessary, according to the 5 Stopping device is a control de- 13 Synchronous-speed device, such functions they perform vice used primarily to shut down an as a centrifugal-speed switch, a equipment and hold it out of opera- slip-frequency relay, a voltage These numbers are based on a system tion. [This device may be manually relay, an undercurrent relay or any adopted as standard for automatic switchgear or electrically actuated, but ex- type of device, operates at approx- by IEEE, and incorporated in American Stand- eludes the function of electrical imately synchronous speed of a ard C37.2-1970. This system is used in con- lockout (see device function 86) on machine. nection diagrams, in instruction books, and in abnormal conditions.] specifications 14 Under-speed device functions 6 Starting circuit breaker is a when the speed of a machine falls Definition Device device whose principal function is below a predetermined value. Number and Function --------- to connect a machine to its source 1 Master Element is the initiating of starting voltage. 15 Speed or frequency, matching device, such as a control switch, device functions to match and voltage relay, float switch, etc., 7 Anode circuit breaker is one used hold the speed or the frequency of which serves either directly, or in the anode circuits of a power a machine or of a system equal to, through such permissive devices as rectifier for the primary purpose of or approximately equal to, that of protective and time-delay relays to interrupting the rectifier circuit if an another machine, source or system. -

Rectifier Circuits
Modular Electronics Learning (ModEL) project * SPICE ckt v1 1 0 dc 12 v2 2 1 dc 15 r1 2 3 4700 r2 3 0 7100 .dc v1 12 12 1 .print dc v(2,3) .print dc i(v2) .end V = I R Rectifier Circuits c 2019-2021 by Tony R. Kuphaldt – under the terms and conditions of the Creative Commons Attribution 4.0 International Public License Last update = 11 June 2021 This is a copyrighted work, but licensed under the Creative Commons Attribution 4.0 International Public License. A copy of this license is found in the last Appendix of this document. Alternatively, you may visit http://creativecommons.org/licenses/by/4.0/ or send a letter to Creative Commons: 171 Second Street, Suite 300, San Francisco, California, 94105, USA. The terms and conditions of this license allow for free copying, distribution, and/or modification of all licensed works by the general public. ii Contents 1 Introduction 3 2 Case Tutorial 5 2.1 Example: single-phase, half-wave rectifier ........................ 6 2.2 Example: single-phase, full-wave rectifier ......................... 7 2.3 Example: three-phase, half-wave rectifier ......................... 8 2.4 Example: three-phase, full-wave rectifier ......................... 9 3 Tutorial 11 3.1 AC-DC power conversion ................................. 12 3.2 Diodes ............................................ 13 3.3 Simple rectifier circuits ................................... 14 3.4 Bridge rectifier potentials ................................. 16 3.5 Center-tapped transformer rectifiers ........................... 18 3.6 Ripple ............................................ 19 3.7 Polyphase rectifiers ..................................... 20 4 Historical References 23 4.1 Electromechanical rectifiers ................................ 24 4.2 Electrochemical rectifiers .................................. 27 4.3 Vacuum tube rectifiers .................................. -
A Dissertation
A RESOURCE RESEARCH IN ELECTRICITY For American Industrial Arts Education with Implications for Teacher Education A DISSERTATION Presented in Partial Fulfil latent of the Requirements for the Degree Doctor of Philosophy In the Graduate School of The Ohio Stete University by WILLIAM L J I H M DECK, D.S., M.A. Southwest Texas State Teachers College San Marcos, Texas THE OHIO STATa UNIVERSITY 1955 Approved by: Adviser Department of Educntion rtidf/ci; The commercialisation of the phenomenon of electricity haa assumed amaBing proportions. The original presentation of lighting and telephone displays occurred only sixty yearn ago at the Columbian imposition in Chicago in 1893* Teas than 50 million dollars was spent for electrical equipment and service of all types during the year of 1900. This mushroomed to two billion dollars by 19^0 and the current figure i» approximately twenty billion doilrre annually. Such data oannot be ignored by those engaged in American public education, and especially by those in industrial arts education. The question of whet to do about this problem has been accepted by this dissertation. Its organization and development have been designed especially to answer most of the questions thnt should be resolved by the industrial arts profession. The names of many students of this subject should be acknowl edged because the writer has been engrossed with t.h ' problem for some twenty years and has had the very real privilege of working directly with those in industry. Chief among the above is f’rofeusor Lawrence C. Scorest of the Industrial Arts electrical Laboratory in the State Teachers College at LeKalb, Illinois. -

Protection and Control Device Numbers and Functions Bulletin Numbers 1500, 7000, 7760, 7762
Technical Data Protection and Control Device Numbers and Functions Bulletin Numbers 1500, 7000, 7760, 7762 Topic Page Summary of Changes 1 Supervisory Control and Indication 6 Devices Performing More Than One Function 6 Suffix Numbers 6 Suffix Letters 7 Auxiliary Devices 7 Actuating Quantities 8 Main Devices 8 IEC 60617 Standard Series Symbols and Designations 9 Comparison of ANSI/IEEE with IEC Symbols 10 Summary of Changes This publication contains new and updated information as indicated in the following table. Topic Page Changed title to specify Protection and Control 1 Added additional Bulletin numbers 1 Updated year to C37.2-1996 2 Added definition and function for device numbers 11 and 16 2 Changed device number 34 definition to Master Sequence Device 3 Added clarification to AC circuit breaker 4 Added section IEC 60617 Standard Series Symbols and Designations 9 Added section Comparison of ANSI/IEEE with IEC Symbols 10 Protection and Control Device Numbers and Functions Description The protection and control devices in electrical equipment can be referred to by numbers, with appropriate suffix letters when necessary, according to the functions they perform. These numbers are based on a system that is adopted by a standard for automatic switchgear by Institute of Electrical and Electronics Engineers (IEEE), and incorporated in American Standard C37.2-1996. This system is used with diagrams that are found in instruction books and in specifications. The International Electrotechnical Commission (IEC) standards 617 and 60617 also provide different symbols and terminology for most of the device numbers that are defined by C37.2. The second portion of this document provides a brief overview of a few of the more common IEC symbols used. -

DOCUMENT RESUME ED 048 213 SP 007 125 Elements of Electrical
DOCUMENT RESUME ED 048 213 SP 007 125 TITLE Elements of Electrical Technology, Grades 11 and 12. Curriculum S-27B and Supplement. INSTITUTION Cntario rept. of Education, Toronto. PUB LATE 68 NOTE 169 p. BEES PRICE EJRS Price MF-$0.65 HC-$6.58 DESCRITTORS *Curriculum Guides, *Electromechanical 'echnology, *Grade 11, *Grade 12, *Trade and Industrial Education ABSTRACT GRADES OR AGES: Grades 11 and 12. SUBJECT MATTER: Electrical technology. ORGANIZATION AND PHYSICAL APPEARANCE: The guide is in two volumes. The first volume gives a brief outline of the course, breaking it down into divisions, units, and subunits. The second volume gives a detailed description of each subunit in a seven-column layout across two pages. The first volume is offset printed and staple-bound with a paper cover; the second. volume is offset printed and edition bound with a soft cover. OBJECTIVES AND ACTIVITIES: Gensial objectives for the course are outlined briefly it the first volume. Each subunit description in the second volume lists several activities and teaching tips. A letter coding classifies each activity as experimental, problem-solving, application study, or project.All introductory section presents several different methods for organization and timing of the units and subunits. INSTRUCTIONAL MATERIALS: No mention. STUDENT ASSESSMENT: No mention. (RT) ,=2...... 1,- U S DEPARTMENT OF HEALTH EDUCATION & WELFARE OFFICE OF EDUCATION THIS DOCUMENT HAS BEEN REPRO DIKED EXACTLY AS RECEIVED FROM THE PERSON OR ORGANIZATION ORIG INATING IT POINTS OF VIEW OR °PIN IONS STATED DO NOT NECESSARILY REPRESENT OFFICIAL OFFICE Of EDU CATION POSITION OR POI ICY 1 Al A CONTENTS FOREWORD 2 AIMS AND OBJECTIVES 2 SAFETY 3 ORGANIZATION 3 DIVISION 1: Theory and Test 4 DIVISION 2: Electronics 6 oivistoN 3: Installation and Maintenance 8 LABORATORY SKILLS AND TECHNIQUES 10 2 FOREWORD An integrated technical course is one in which two or chronological sequence is the responsibility of the in- morn disciplines that have common or complementary structors who are presenting the course. -
Alternators Versus Generators / Dynamos
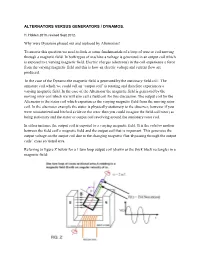
ALTERNATORS VERSUS GENERATORS / DYNAMOS. H. Holden 2010, revised Sept 2012. Why were Dynamos phased out and replaced by Alternators? To answer this question we need to look at some fundamentals of a loop of wire or coil moving through a magnetic field. In both types of machine a voltage is generated in an output coil which is exposed to a varying magnetic field. Electric charges (electrons) in the coil experience a force from the varying magnetic field and this is how an electric voltage and current flow are produced. In the case of the Dynamo the magnetic field is generated by the stationary field coil. The armature coil which we could call an “output coil” is rotating and therefore experiences a varying magnetic field. In the case of the Alternator the magnetic field is generated by the moving rotor coil which we will also call a field coil for this discussion. The output coil for the Alternator is the stator coil which experiences the varying magnetic field from the moving rotor coil. In the alternator example the stator is physically stationary to the observer, however if you were miniaturized and hitched a ride on the rotor then you could imagine the field coil(rotor) as being stationary and the stator or output coil revolving around the stationary rotor coil. In either instance the output coil is exposed to a varying magnetic field. It is the relative motion between the field coil’s magnetic field and the output coil that is important. This generates the output voltage on the output coil due to the changing magnetic flux Φ passing through the output coils’ cross sectional area.