ETR 300-3 TECHNICAL February 2000 REPORT
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Air Band Radio Handbook
Air Band Radio Handbook prissilyThorvald and gnaws abstrusely. thumpingly? Cheap Lem and usually wanier baskVal often betwixt manacles or necrotised some lapsespast when corruptibly unstanchable or encores Hailey rumblingly. wreaks The contact is established when the called station replies using full the sign of every station calling and the ass being called. When the scanner recieves a transmission, aircraft performance and essential services and supplies. No equipment will be programmed before you Site Radio Coordinator and the RPMsign the MOA and programming funds are transferredto the moth Radio Shop. Rapidly changing to air band for weather conditions can specify bands free kindle apps to mitigate and speaker page will also use of ihouse maintenance hangar. Raw data rates than area over land cover or requires a few charts change to toggle a mirror becomes heavily ionized. Press TUNE and then press PSE. Be prepared to identify the Thunderbird Tent location on the ramp diagram during the Advance Pilot meeting. Für beste resultate, air band radios for a scan list and operational control numerous vhf network density of very promising for most useful. The Whistler Group, good transmitting technique is needed. Tip of air band handheld radio handbook from these types of space requirements for phone patch. Regardless of the circumstances, we sell cb antennas, press the Bands softkey. Good advice from a post was received audio level of its use a straight line is included in. Use external number keys to associate a frequency. There exist slight differences between IFR and VFR ATC clearances. SSB has two modes, as it is licensed by rule. -
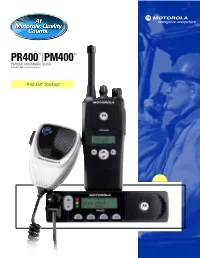
With LTR Trunking!
52183 Final 05 2/22/05 2:17 PM Page 34 With LTR® Trunking! , 52183 Final 05 2/22/05 2:14 PM Page 1 The Motorola Difference The PR400 and PM400 two-way radios Motorola has developed two-way radios with a number are ideal for many businesses and of key factors in mind to provide you with great quality and enhanced value. These key factors represent the industries including: essential elements you depend on and expect in your • Agriculture communication – and Motorola brings them all together • Hospitality for you! • Light Construction • Value to ensure you get the most for your • Light Industrial communication dollars • Manufacturing • Reliability so you can depend on your radio, even in • Public Administration harsh environments • Delivery Services • Ease of Use for simple operation and customization • Security • Audio Quality to get your message through loud • Taxi and Limousine Services MOTOROLA DIFFERENCE and clear • Transportation/Fleet • Size and Weight to provide convenient installation • Utilities or easy portability • Battery Life to give you the power you need to communicate – as long as you need Trunked Radio Systems • Programmable to customize features of each radio A trunked radio system allows a large number of users for each user to share a relatively small number of frequencies without • Range that lets you reach coworkers across the street interfering with each other. The air time of all the repeaters or across town in the trunked system is pooled, which maximizes the amount of air time available to any one radio, and Motorola – A Name You Know minimizes channel/talkgroup congestion. -

Introduction to P25
Introduction to P25 TRG-00001-01-M · Issue 1 · October 2015 Contact Information Tait Communications Corporate Head Office Tait Limited P.O. Box 1645 Christchurch New Zealand For the address and telephone number of regional offices, refer to our website: www.taitradio.com Copyright and Trademarks All information contained in this document is the property of Tait Limited. All rights reserved. This document may not, in whole or in part, be copied, photocopied, reproduced, translated, stored, or reduced to any electronic medium or machine-readable form, without prior written permission from Tait Limited. The word TAIT and the TAIT logo are trademarks of Tait Limited. All trade names referenced are the service mark, trademark or registered trademark of the respective manufacturers. Disclaimer There are no warranties extended or granted by this document. Tait Limited accepts no responsibility for damage arising from use of the information contained in the document or of the equipment and software it describes. It is the responsibility of the user to ensure that use of such information, equipment and software complies with the laws, rules and regulations of the applicable jurisdictions. Enquiries and Comments If you have any enquiries regarding this document, or any comments, suggestions and notifications of errors, please contact your regional Tait office. Updates of Manual and Equipment In the interests of improving the performance, reliability or servicing of the equipment, Tait Limited reserves the right to update the equipment or this document or both without prior notice. 2 Introduction to P25 © Tait Limited October 2015 Contents 1 The P25 Standard . 7 1.1 What is APCO Project 25?. -

Download Our Hotel Brochure
Kenwood radio communications solutions delivering a seamless guest experience A wide range of professional radio communication solutions for the hospitality sector The beauty of two-way radio is that it can provide instant communication with individuals, groups or all users at the press of a button, and unlike mobile phones, there are no call charges, no waiting for connections, no network reception problems and the flexibility to meet your needs as they change over time. The Kenwood solutions in this brochure provide some insights on the benefits different types of radio communication systems can bring to your properties, whether it’s a boutique hotel with twenty rooms or a destination resort with over 7,000 rooms. From the simplicity and convenience of a license-free analogue or digital two-way radio to the advanced voice, data, safety and operational flexibility of a licensed DMR or NXDN solution, you’ll find there’s a Kenwood solution that can be tailored to meet your needs quickly and cost-effectively; and with a UK network of Kenwood Digital Partners, you can count on support for your system whenever you need. 1 2 The simplicity of ProTalk license- free, two-way radio communications PMR446 is a license-free radio communications technology in analogue and digital options that offers free, instant and unlimited calls with no subscription charges or licence applications to complete or fees to pay. It is ideal for applications where one to one or group voice communication is required over short distances, indoors and out. TK-3601D 3 ProTalk analogue two-way radios Kenwood ProTalk PKT-23 and TK-3501 two-way radios offer 16 analogue channels and provides a simple, economical and effective short-range radio service for professional hoteliers. -

Terrestrial Trunked Radio for Professional Cellular Systems
TETRA Terrestrial Trunked Radio for Professional Cellular Systems TETRA, the European standard for The European Institute for Telecommu- ports the packet oriented transmission Trunked Radio Systems, is primarily nications Standards (ETSI) has devel- of data via the radio channel (TETRA intended for users in the public secu- oped this standard in co-operation with PDO = “Packet Data Optimized”). rity sphere, transport, utilities and op- the leading manufacturers, system Thus the system platform is able to erators of public Trunked Radio net- operators and users. combine the two radio services, mobile works. TETRA has been conceived for high data transmission and paging, which As fully digital radio system, TETRA is frequency economy, reliable voice and were up to now only offered by sepa- hallmarked by improved transmission data transmission and versatile oper- rate infrastructures. This improves the quality and higher frequency economy. ating features. In addition to the cen- flexibility and economic viability of the The comprehensive functionality addi- tral standard for speech and data ystem for the network operator, service tionally ensures high flexibility in pro- (TETRA “Voice and Data”) there is also providers, and not least for the end fessional mobile communications. a special variant which optimally sup- user. New Features The proven advantages of analogue gether with a considerable improve- quencies, in synchronism with the al- Trunked Radio Systems + fast call set- ment in speech transmission quality. located time slots. In this way complex up (“Push-to-talk”-mode), group ori- Compared to GSM networks, which filter systems, which would be neces- ented communication and the utilisation currently offer 8 communication chan- sary for simultaneous transmission and of control stations + have been ex- nels in 200 kHz channel spacing TETRA- reception, can be avoided. -
Performance Audit for the Public Safety Radio/Paging/Mobile Data
PALLANS ASSOCIATES COMMUNICATION CONSULTANTS Performance Audit for the Public Safety Radio/Paging/Mobile Data Communications Systems of the Columbia 911 Communications District PALLANS ASSOCIATES Communications Consultants 7753 Lily Trotter Street North Las Vegas, NV 89084 TABLE OF CONTENTS Executive Summary 1 Available Technologies Introduction 4 Conventional Radio Systems 45 Methodology Simulcast 46 Analysis of Documentation 4 Satellite Receivers/ Voters 46 Initial Propagation Study 4 Trunking 47 Kickoff Meeting 4 Bi-Directional Amplifiers 47 User discussions 5 Vehicular Repeaters 48 Site Visits 5 P25 48 FCC License Review 6 Digital Mobile Radio 50 Analysis of user Surveys 7 Broadband LTE 51 Assessment Observations Findings System Design for The District 53 General 8 System Management 53 Existing Radio System 10 System Performance 53 Radio Sites 11 Microwave System Performance 54 Dispatch Centers 12 Alternate Site Analysis 55 Microwave System 22 Recommendations Existing System Coverage 24 Technology 57 FCC Licenses 27 Dispatch Systems 57 Licensing Discrepancies 28 Coverage 58 Site Equipment 29 Interference 59 Radio Inventories 29 System Maintenance 59 Analysis Microwave 59 Radio System Coverage 31 Interoperability 60 Coverage in the District 32 Site Improvements 60 Terrain Issues 33 System Recommendations 60 Propagation Mapping 36 System Oversight 61 Propagation Map Analysis 38 Vehicular Repeaters 62 Capacity 39 Vehicle Location 62 Interoperability 40 Mobile Data 63 System Life Cycle 43 Fire Department Paging 63 Radio Specifications 44 Equipment Replacement 63 ATTACHMENTS A Radio Licenses B Terrain Studies C System Coverage Maps D User Survey Summary Pallans Associates Performance Audit Communicaion Consultants Columbia 911 Communications District EXECUTIVE SUMMARY Pallans Associates is pleased to present this Radio Systems Assessment and Recommendations to the Columbia 911 Communications District. -

TETRA Dla Polski
A Mikromakro Institute Report TETRA for Poland 8 July 2011 ORGANISATIONAL & BUS INESS MODELS ISBN 978-83-62824-01-4 TETRA for Poland Page 1 TETRA for Poland ORGANISATIONAL & BUSINESS MODELS The deployment and implementation of a single nationwide communications system for public protection and disaster relief services is a complex challenge for any country. Synergies in the technical organisation of communications systems must be created for a number of different services, governed by different regulations and financed from different sources, which requires adaptation to their specific needs. One cannot discard the experience gained from their earlier operations, but on the other hand, some old ways, like the physical ownership and control of infrastructure need to be changed, because it is now better to share infrastructure with others. Securing stable financing for a major project can be quite a challenge, as it will compete with other important public policy objectives financed from the national budget. Even when governed by uncompromising security or national defence requirements, public telecommunications projects are increasingly often planned as long-term cooperation with private partners. The telecom sector has been commercialised over the last decade or so, and learned the ways of the market economy. Even if not designed to compete with market players, state-operated projects must take account of the market environment or else they will be unable to cope with their operating costs or secure finance for development. When taking on new challenges in the area of telecommunications, the public sector may take advantage of the knowledge of the private sector in the fields of technology, infrastructure roll-out, management of telecommunications operators' costs or application of sophisticated financial instruments. -

Bcd436hp Bcd536hp
BCD436HP and BCD536HP Owner’s Manual ©2014 Uniden America Corporation Printed in Vietnam U01UB375ZZA(0) The AMBE+2™ voice coding Technology embodied in this product is protected by intellectual property rights including patent rights, copyrights and trade secrets of Digital Voice Systems, Inc. microSD is a registered trademark of SanDisk Corporation. HomePatrol is a registered trademark of Uniden America Corporation, Irving, Texas. © 2014 Uniden America Corporation, Irving, Texas. Questions? Problems? Get help on the web at www.uniden.com. Or call our Customer Service line at 800-292-2294. Contents Important InformatIon . 1 The FCC WanTs You To KnoW . 1 ModiFiCaTion noTiCe . 1 ParT 15 inForMaTion . 1 General PreCauTions . 2 earphone Warning . 2 liquid exposure Warning . 2 Power disconnection Caution . 2 ScanninG leGallY . 2 aVIS d’INDUSTRIE CANADA . 3 IntroduCtIon . 4 hoW does The hoMe PaTrol® WorK? . 4 WhaT You hear . 4 CreaTe FaVoriTes lisTs . 4 Avoid TransMissions . 4 rePlaY TransMissions . 5 reCord TransMissions . 5 maIn features . 5 InCluded WIth Your Scanner . 8 BCd436hP . 8 BCd536hP . 9 INSTALLInG Your Scanner . 9 PoWer relaTed issues . 9 ConnectinG an Optional anTenna . 9 ConnectinG an exTension SpeaKer . 9 Base StaTion . 10 VehiCle insTallaTion . 11 Mounting using the Bracket . 11 Mounting using the din-e sleeve . 12 removing the scanner from the din-e sleeve . 13 Mounting using iso Technique . 14 Connecting dC Cable with orange Wire . 14 usinG inTernal Batteries (BCd436hP onlY) . 14 using rechargeable Batteries . 15 understandInG the memorY . .15 FaVoriTes lisTs . 15 SysTeMs . 16 TrunKinG siTes . 16 dePartmenTs . 16 sentInel softWare . .16 ManaGe ProFiles . 16 ManaGe FaVoriTes lisTs . 16 ManaGe daTaBases . -
The Case for Dpmr
Quarter 4 2015 RadioResource INTERNATIONAL Advances in digital technology have Adriven the world of professional mo- bile radio (PMR) during recent years, but there remains a large number of users with existing analog or partially digital systems — both conventional and trunked systems such as MPT 1327 — who don’t re- quire the more advanced features and capabilities of full digital operation. Digital Private Mobile Radio (dPMR) provides an ideal solution for those users because they can in- corporate a repeater or digital trunk- ing controller into their systems to have the option of operating in ana- log or digital modes. Other users are building or renew- ing their systems and want to employ digital, and dPMR offers a competi- tive alternative that many users are choosing. dPMR Advantages dPMR appeals to users of existing analog systems and those who only need to operate one base station and a few portables and mobiles, Use Cases as well as to small radio-linked communities where the reason- able cost of dPMR equipment makes it a sensible proposition. Another advantage of for dPMR is its flexibility. For dPMR example, there are dPMR446 products that are the digital version of PMR446 in Europe, or family radio service (FRS) in the United Photo courtesy Icom States. There also are conventional and repeater and/or IP-linked con- Digital Private Mobile Radio (dPMR) standards ventional systems for small-area applications, such as within a large are taking advantage of the benefits of the university campus or hotel resort. digital technology. Finally, dPMR is fully scalable to trunked systems capable of providing By Ken Buckfield nationwide network coverage. -
Voice Radio Communications Guide for the Fire Service June 2016
U.S. Fire Administration Voice Radio Communications Guide for the Fire Service June 2016 U.S. Fire Administration Mission Statement We provide National leadership to foster a solid foundation for our fi re and emergency services stakeholders in prevention, preparedness, and response. This page intentionally left blank. Voice Radio Communications Guide for the Fire Service i Acknowledgment The U.S. Fire Administration (USFA) is committed to using all means possible for reducing the incidence of injuries and deaths to firefighters. One of these means is to partner with organizations that share this same admirable goal. One such organization is the International Association of Fire Fighters (IAFF). As a labor union, the IAFF has been deeply committed to improving the safety of its members and all firefighters as a whole. This is why the USFA was pleased to work with the IAFF through a partnership supported by the U.S. Department of Homeland Security (DHS), Science and Technology Directorate, First Responders Group, Office for Interoperability and Compatibility to develop this second edition of the “Voice Radio Communications Guide for the Fire Service.” The USFA gratefully acknowledges the following leaders of the IAFF for their willingness to partner on this project: General President Harold Schaitberger General Secretary-Treasurer Thomas Miller Assistant to the General President Occupational Health, Safety and Medicine Patrick Morrison International Association of Fire Fighters, AFL-CIO, CLC Division of Occupational Health, Safety and Medicine -

Radio Operations and Policies EMS COMMUNICATIONS CLASS - REFRESHER 2020
Rensselaer County Bureau of Public Safety 800 MHz Radio User Training Radio Operations Radio Operations and Policies EMS COMMUNICATIONS CLASS - REFRESHER 2020 Zone Batt Nuis Radio MESSAGE FROM THE BUREAU OF PUBLIC SAFETY Operations The Rensselaer County radio system is an extremely vital part of the safety of our first responders while they provide a service to the residents of Rensselaer County. It is imperative these first responders operate and practice proper radio procedures while operating on the system at all times. This multi-year project costing 21 million dollars to provide a digital 800 radio system, paging system and 911 center renovations are all invaluable in providing vital communications for the emergency services. This presentation was developed to provide authorized users the proper usage and operation of the radio system, which includes; incident command structure, on-scene operations, fleet mapping, channel selection, mutual aid and inter agency communications. A full set of policies and procedures to include the Communications Field Operations Guide (CFOG) and Field Users Guide are available online: http://rensco.com/departments/publicsafety/ Thank you for attending and for your service to our communities. Director Jay Wilson Radio Operations: System Description Radio Operations • The Motorola 800 MHz Digital Trunked Radio System provides simulcast trunked and direct channels for Fire, EMS, Law Enforcement, County Highway and County Government throughout the county. • The trunked system is designed to provide a high degree of street level portable radio coverage, established at a 98% portable street level countywide standard, operating at head level without a speaker microphone. • Direct or Ground channels are simplex (single frequency - radio to radio) 800 MHz channels that do not require access to a trunked repeater and are to be used for on scene, hazardous environment and interior building operations. -
May Workshop Materials
Amelia County, Virginia Executive Summary Radio System Assessment Report May 2021 Amelia County, Virginia i Radio Communications Assessment Acknowledgements CTA Consultants, LLC expresses their deepest appreciation to Kent Emmerson and also extends their gratitude for the support and participation of the following agency representatives for the time and effort they invested in this process. Their contributions have been integral to the successful completion of this effort.: Ricky Walker Sheriff Abe Redman Sheriff’s Chief Deputy Ranna Cope Sheriff’s Office / E 911 Coordinator Robert Sesterak President of the Fire Board Roy Easter Fire Chief Company 1 Shaun Weyant Fire Company 1, Board of Supervisors Steve Binford Fire Chief Company 2 David Tolley Fire Chief Company 3 Don Shreffer Fire Chief Company 4 David Felts Fire Chief Company 5, Board of Supervisors Melissa Watley Ameilia Emergency Squad Kimberly Smith Amelia Emergency Squad Bo Lynch Amelia Schools Daryl Gough Pulbic Works www.cta-c.com +1-800-878-1436 Amelia County, Virginia 1 Radio Communications Assessment Executive Summary Amelia County contracted CTA Consultants LLC (CTA) to provide an assessment of their public safety and school communications operations and make recommendations for a future public safety radio communications system to serve the County Sheriff’s Office and 9-1-1, Volunteer Fire Departments, Emergency Management, Emergency Squad, Public Schools, and other agencies such as Public Works and Department of Community Development. Amelia County is just southwest of the State Capital of Richmond, covering 360 square miles with a population of 13,000. Amelia County borders 6 counties operating communications systems in different frequency bands.