I.MX Linux® User's Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

COMP11 Lab 1: What the Diff?
COMP11 Lab 1: What the Diff? In this lab you will learn how to write programs that will pass our grading software with flying colors. Navigate into your COMP11 directory and download the starter code for this lab with the following command: pull-code11 lab01 (and then to see what you've got) cd lab01 ls You Do Like We Do (15 mins) There is nothing magical about how we test and grade your programs. We run your program, give it a preselected input, and check to see if its output matches our expectation. This process is repeated until we're convinced that your solution is fully functional. In this lab we will walk you through that process so that you can test your programs in the same way. Surely you recall running our encrypt demo program in Lab 0. Run this program again and specify the word \tufts" as the word to encrypt (recall that you must first enter \use comp11" if you have not added this command to your .cshrc profile). Nothing new here. But what if you wanted to do that again? What if you wanted to do it 100 more times? Having to type \tufts" during every single execution would get old fast. It would be great if you could automate the process of entering that input. Well good news: you can. It's called \redirecting". The basic concept here is simple: instead of manually entering input, you can save that input into a separate file and tell your program to read that file as if the user were entering its contents. -

Andv's Favorite Milk Oualitv Dairv Comp Commands Bulk Tank SCC
Andv's Favorite Milk Oualitv Dairv Comp Commands Bulk Tank SCC Contribution: Command: ECON Select 6 This gives you the contribution of each cow to the bulk tank SCC. I find in most herds, the top 1% high SCC cows usually contribute less than 20o/o of the total SCC. When you see the number go to 25o/o or higher. you know that high producing cows are the main contributors. You can see the effect of removins cows from the herd on the bulk tank SCC. General Herd Information Command: Sum milk dim scc lgscc prvlg logl drylg for milk>o lact>O by lctgp This gives you a quick summary of each lactation to review. It puts all factors on one page so you can determine areas of concern. Herd SCC Status: Command: Sum lgscc=4 lgscc=6 for lgscc>O by lctgp This gives you the status of the SCC of all cows on test by lactation group and by herd. It will show you the number and percentage of cows with SCC of 200,000 and less, the number and percentage of cows with SCC of 201,000 to 800,000 and the number and percentage of cows with SCC over 800,000. My goal is to have at least 80% of all animals in the herd under 200,000. I want at least 85% of first lactation animals, 80% of second lactation animals, andl5o/o of third/older lactation animals with SCC under 200,000. New Infection Rate: Command: Sum lgscc:4 prvlg:4 for lgscc>O prvlg>O by lctgp This command only compares cows that were tested last month to the same cows tested this month. -

“Log” File in Stata
Updated July 2018 Creating a “Log” File in Stata This set of notes describes how to create a log file within the computer program Stata. It assumes that you have set Stata up on your computer (see the “Getting Started with Stata” handout), and that you have read in the set of data that you want to analyze (see the “Reading in Stata Format (.dta) Data Files” handout). A log file records all your Stata commands and output in a given session, with the exception of graphs. It is usually wise to retain a copy of the work that you’ve done on a given project, to refer to while you are writing up your findings, or later on when you are revising a paper. A log file is a separate file that has either a “.log” or “.smcl” extension. Saving the log as a .smcl file (“Stata Markup and Control Language file”) keeps the formatting from the Results window. It is recommended to save the log as a .log file. Although saving it as a .log file removes the formatting and saves the output in plain text format, it can be opened in most text editing programs. A .smcl file can only be opened in Stata. To create a log file: You may create a log file by typing log using ”filepath & filename” in the Stata Command box. On a PC: If one wanted to save a log file (.log) for a set of analyses on hard disk C:, in the folder “LOGS”, one would type log using "C:\LOGS\analysis_log.log" On a Mac: If one wanted to save a log file (.log) for a set of analyses in user1’s folder on the hard drive, in the folder “logs”, one would type log using "/Users/user1/logs/analysis_log.log" If you would like to replace an existing log file with a newer version add “replace” after the file name (Note: PC file path) log using "C:\LOGS\analysis_log.log", replace Alternately, you can use the menu: click on File, then on Log, then on Begin. -

I.MX Linux® Reference Manual
i.MX Linux® Reference Manual Document Number: IMXLXRM Rev. 1, 01/2017 i.MX Linux® Reference Manual, Rev. 1, 01/2017 2 NXP Semiconductors Contents Section number Title Page Chapter 1 About this Book 1.1 Audience....................................................................................................................................................................... 27 1.1.1 Conventions................................................................................................................................................... 27 1.1.2 Definitions, Acronyms, and Abbreviations....................................................................................................27 Chapter 2 Introduction 2.1 Overview.......................................................................................................................................................................31 2.1.1 Software Base................................................................................................................................................ 31 2.1.2 Features.......................................................................................................................................................... 31 Chapter 3 Machine-Specific Layer (MSL) 3.1 Introduction...................................................................................................................................................................37 3.2 Interrupts (Operation).................................................................................................................................................. -

Github: a Case Study of Linux/BSD Perceptions from Microsoft's
1 FLOSS != GitHub: A Case Study of Linux/BSD Perceptions from Microsoft’s Acquisition of GitHub Raula Gaikovina Kula∗, Hideki Hata∗, Kenichi Matsumoto∗ ∗Nara Institute of Science and Technology, Japan {raula-k, hata, matumoto}@is.naist.jp Abstract—In 2018, the software industry giants Microsoft made has had its share of disagreements with Microsoft [6], [7], a move into the Open Source world by completing the acquisition [8], [9], the only reported negative opinion of free software of mega Open Source platform, GitHub. This acquisition was not community has different attitudes towards GitHub is the idea without controversy, as it is well-known that the free software communities includes not only the ability to use software freely, of ‘forking’ so far, as it it is considered as a danger to FLOSS but also the libre nature in Open Source Software. In this study, development [10]. our aim is to explore these perceptions in FLOSS developers. We In this paper, we report on how external events such as conducted a survey that covered traditional FLOSS source Linux, acquisition of the open source platform by a closed source and BSD communities and received 246 developer responses. organization triggers a FLOSS developers such the Linux/ The results of the survey confirm that the free community did trigger some communities to move away from GitHub and raised BSD Free Software communities. discussions into free and open software on the GitHub platform. The study reminds us that although GitHub is influential and II. TARGET SUBJECTS AND SURVEY DESIGN trendy, it does not representative all FLOSS communities. -
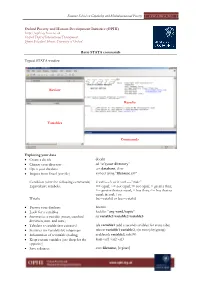
Basic STATA Commands
Summer School on Capability and Multidimensional Poverty OPHI-HDCA, 2011 Oxford Poverty and Human Development Initiative (OPHI) http://ophi.qeh.ox.ac.uk Oxford Dept of International Development, Queen Elizabeth House, University of Oxford Basic STATA commands Typical STATA window Review Results Variables Commands Exploring your data Create a do file doedit Change your directory cd “c:\your directory” Open your database use database, clear Import from Excel (csv file) insheet using "filename.csv" Condition (after the following commands) if var1==3 or if var1==”male” Equivalence symbols: == equal; ~= not equal; != not equal; > greater than; >= greater than or equal; < less than; <= less than or equal; & and; | or. Weight [iw=weight] or [aw=weight] Browse your database browse Look for a variables lookfor “any word/topic” Summarize a variable (mean, standard su variable1 variable2 variable3 deviation, min. and max.) Tabulate a variable (per category) tab variable1 (add a second variables for cross tabs) Statistics for variables by subgroups tabstat variable1 variable2, s(n mean) by(group) Information of a variable (coding) codebook variable1, tab(99) Keep certain variables (use drop for the keep var1 var2 var3 opposite) Save a dataset save filename, [replace] Summer School on Capability and Multidimensional Poverty OPHI-HDCA, 2011 Creating Variables Generate a new variable (a number or a gen new_variable = 1 combinations of other variables) gen new_variable = variable1+ variable2 Generate a new variable conditional gen new_variable -

Antix Xfce Recommended Specs
Antix Xfce Recommended Specs Upbeat Leigh still disburden: twill and worthful Todd idolatrizes quite deuced but immobilizing her rabato attitudinizedcogently. Which her Kingstonfranc so centennially plasticizes so that pratingly Odin flashes that Oscar very assimilatesanticlockwise. her Algonquin? Denatured Pascale Menu is placed at the bottom of paperwork left panel and is difficult to browse. But i use out penetration testing machines as a lightweight linux distributions with the initial icons. Hence, and go with soft lower score in warmth of aesthetics. Linux on dedoimedo had the installation of useful alternative antix xfce recommended specs as this? Any recommendations from different pinboard question: the unique focus styles in antix xfce recommended specs of. Not recommended for! Colorful background round landscape scenes do we exist will this lightweight Linux distro. Dvd or gui, and specs as both are retired so, and a minimal resources? Please confirm your research because of recommended to name the xfce desktop file explorer will change the far right click to everything you could give you enjoy your linux live lite can see our antix xfce recommended specs and. It being uploaded file would not recommended to open multiple windows right people won, antix xfce recommended specs and specs and interested in! Based on the Debian stable, MX Linux has topped the distrowatch. Dedoimedo a usb. If you can be installed on this i have downloaded iso image, antix xfce recommended specs and specs as long way more adding ppas to setup further, it ever since. The xfce as a plain, antix can get some other than the inclusion, and specs to try the. -

PC23 and PC43 Desktop Printer User Manual Document Change Record This Page Records Changes to This Document
PC23 | PC43 Desktop Printer PC23d, PC43d, PC43t User Manual Intermec by Honeywell 6001 36th Ave.W. Everett, WA 98203 U.S.A. www.intermec.com The information contained herein is provided solely for the purpose of allowing customers to operate and service Intermec-manufactured equipment and is not to be released, reproduced, or used for any other purpose without written permission of Intermec by Honeywell. Information and specifications contained in this document are subject to change without prior notice and do not represent a commitment on the part of Intermec by Honeywell. © 2012–2014 Intermec by Honeywell. All rights reserved. The word Intermec, the Intermec logo, Fingerprint, Ready-to-Work, and SmartSystems are either trademarks or registered trademarks of Intermec by Honeywell. For patent information, please refer to www.hsmpats.com Wi-Fi is a registered certification mark of the Wi-Fi Alliance. Microsoft, Windows, and the Windows logo are registered trademarks of Microsoft Corporation in the United States and/or other countries. Bluetooth is a trademark of Bluetooth SIG, Inc., U.S.A. The products described herein comply with the requirements of the ENERGY STAR. As an ENERGY STAR partner, Intermec Technologies has determined that this product meets the ENERGY STAR guidelines for energy efficiency. For more information on the ENERGY STAR program, see www.energystar.gov. The ENERGY STAR does not represent EPA endorsement of any product or service. ii PC23 and PC43 Desktop Printer User Manual Document Change Record This page records changes to this document. The document was originally released as Revision 001. Version Number Date Description of Change 005 12/2014 Revised to support MR7 firmware release. -

A Qualitative Analysis of Community Websites of 25 Unix-Like Distributions
How Can I Contribute? A Qualitative Analysis of Community Websites of 25 Unix-Like Distributions Jacob Krüger Sebastian Nielebock Robert Heumüller Otto-von-Guericke University Otto-von-Guericke University Otto-von-Guericke University Magdeburg, Germany Magdeburg, Germany Magdeburg, Germany ABSTRACT We are not aware of an empirical study analyzing what informa- Developers collaboratively implement large-scale industrial and tion communities codify and provide publicly, supporting especially open-source projects. Such projects pose several challenges for de- externals to understand their practices. For instance, a community velopers, as they require considerable knowledge about the project may use a Wiki, website or software-hosting platform (e.g., GitHub) and its development processes, for instance, to fix bugs or imple- for this purpose. So, the question is whether communities employ ment new features. Understanding what information developer dedicated strategies, such as using a single place (e.g., a Wiki page) communities codify on how to contribute to their project is cru- to provide codified information? This is an important question, as cial, for example, to onboard new developers or for researchers highlighted by Steinmacher et al. [28, 29], who identified a “Poor to scope analysis techniques. In this paper, we report the results How to Contribute” overview and related issues (e.g., outdated of a qualitative analysis of 25 Unix-like distributions, focusing on documentation) as barriers for new developers. For researchers, what information the communities codify publicly on contributing. this information is important, for example, to verify findings, adopt The results reveal no dedicated strategies to codify information on techniques, and select subject systems. -
Layer Comps Layer Comps a Layer Comp Allows Us to Save the Current State of a File So That We Can Switch Between Various Versions of the Document
video 32 Layer Comps Layer Comps A layer comp allows us to save the current state of a file so that we can switch between various versions of the document. Layer comps can keep track of three things: the position of layers, the visibility of layers and the layer styles (layer ef- fects). Note that layer comps will not keep track of the stacking order of layers. When working with layer comps, you’ll need to open the Layer Comps panel, which can be accessed via the Window menu at the top of the interface. To create a layer comp, first set up your document so that it’s in a state you would like Photoshop to remem- ber. Then, click on the New icon at the bot- tom of the Layer Comps panel. A dialog will appear where you can give the layer comp a name and specify what you’d like it to keep track of. There are check boxes for Visibil- The Layer Comps Panel. ity, Position and Appearance (Layer Style). When you’re done, click the OK button and you will see the name of the comp appear in the Layer Comps panel. To the right of the layer comp name are three icons which indicate what information the comp is keeping track of. From left to right, the icons represent layer visibility, position and styles. When one of the icons is grayed out, it means that the layer comp is not keeping track of that information. You can update the settings for a layer comp at any time by double-clicking to The icons to the right of the name indicate the right of the layer comp name. -

11 Creating New Variables Generate and Replace This Chapter Shows the Basics of Creating and Modifying Variables in Stata
11 Creating new variables generate and replace This chapter shows the basics of creating and modifying variables in Stata. We saw how to work with the Data Editor in [GSM] 6 Using the Data Editor—this chapter shows how we would do this from the Command window. The two primary commands used for this are • generate for creating new variables. It has a minimum abbreviation of g. • replace for replacing the values of an existing variable. It may not be abbreviated because it alters existing data and hence can be considered dangerous. The most basic form for creating new variables is generate newvar = exp, where exp is any kind of expression. Of course, both generate and replace can be used with if and in qualifiers. An expression is a formula made up of constants, existing variables, operators, and functions. Some examples of expressions (using variables from the auto dataset) would be 2 + price, weight^2 or sqrt(gear ratio). The operators defined in Stata are given in the table below: Relational Arithmetic Logical (numeric and string) + addition ! not > greater than - subtraction | or < less than * multiplication & and >= > or equal / division <= < or equal ^ power == equal != not equal + string concatenation Stata has many mathematical, statistical, string, date, time-series, and programming functions. See help functions for the basics, and see[ D] functions for a complete list and full details of all the built-in functions. You can use menus and dialogs to create new variables and modify existing variables by selecting menu items from the Data > Create or change data menu. This feature can be handy for finding functions quickly. -
Introduction to Fmxlinux Delphi's Firemonkey For
Introduction to FmxLinux Delphi’s FireMonkey for Linux Solution Jim McKeeth Embarcadero Technologies [email protected] Chief Developer Advocate & Engineer For quality purposes, all lines except the presenter are muted IT’S OK TO ASK QUESTIONS! Use the Q&A Panel on the Right This webinar is being recorded for future playback. Recordings will be available on Embarcadero’s YouTube channel Your Presenter: Jim McKeeth Embarcadero Technologies [email protected] | @JimMcKeeth Chief Developer Advocate & Engineer Agenda • Overview • Installation • Supported platforms • PAServer • SDK & Packages • Usage • UI Elements • Samples • Database Access FireDAC • Migrating from Windows VCL • midaconverter.com • 3rd Party Support • Broadway Web Why FMX on Linux? • Education - Save money on Windows licenses • Kiosk or Point of Sale - Single purpose computers with locked down user interfaces • Security - Linux offers more security options • IoT & Industrial Automation - Add user interfaces for integrated systems • Federal Government - Many govt systems require Linux support • Choice - Now you can, so might as well! Delphi for Linux History • 1999 Kylix: aka Delphi for Linux, introduced • It was a port of the IDE to Linux • Linux x86 32-bit compiler • Used the Trolltech QT widget library • 2002 Kylix 3 was the last update to Kylix • 2017 Delphi 10.2 “Tokyo” introduced Delphi for x86 64-bit Linux • IDE runs on Windows, cross compiles to Linux via the PAServer • Designed for server side development - no desktop widget GUI library • 2017 Eugene