The Multi-State Maritime Transportation System Risk Assessment and Safety Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

National Report by the European Union 2020
NATIONAL REPORT BY THE EUROPEAN UNION MARCH 2020 Enhanced Black Carbon and Methane Emissions Reductions Arctic Council Framework for Action National report by the European Union 2020 1 Introduction To overcome the challenges of climate change and environmental degradation the European Commission announced the European Green Deal1 in December 2019. This communication outlines a roadmap to transform EU, reaching the target of no net greenhouse gas emissions by 2050, decoupling economic growth to resource use, enhancing the efficient use of resources, moving to a clean and circular economy and , a zero pollution ambition, including updates to EU regulation on air quality. The actions that are necessary to reach for the goals include investments in environmental-friendly technologies, decarbonisation of the energy sector, development of a cleaner private and public transport, and an increased energy efficiency in buildings. 2 Black carbon emissions and future projections 2.1 Black Carbon emissions have been reduced by almost 40 % since 2000. Mayor reductions occurred in the road transport sector. where emission levels decreased by almost 60%; a sensible reduction occurred in the off-road sector where 2017 emissions are less than half of 2000 ones. A strong contribution to BC emission in the EU27+UK comes from the residential sector (C_OtherStationaryComb in the graph) where no significant emission reduction occurred from 2000; in 2017 emissions from this sector accounted for 38 % of the total. 2.2 Figure 1 provide a visual representation of Black Carbon emission trend for the EU27+UK since 2000 aggregated at GNFR level. Projected emissions are not provided due to lack of reporting from some EU Member States which make not relevant the creation of an aggregated projected emission level for the EU27+UK. -

Domestic Ferry Safety - a Global Issue
Princess Ashika – Tonga – 5 August 2009 74 Lives Lost Princess of the Stars – Philippines - 21 June 2008 800 + Lives Lost Spice Islander I – Zanzibar – 10 Sept 2011 1,600 Dead / Missing “The deaths were completely senseless… a result of systemic and individual failures.” Domestic Ferry Safety - a Global Issue John Dalziel, M.Sc., P.Eng., MRINA Roberta Weisbrod, Ph.D., Sustainable Ports/Interferry Pacific Forum on Domestic Ferry Safety Suva, Fiji October / November 2012 (Updated for SNAME Halifax, Oct 2013) Background Research Based on presentation to IMRF ‘Mass Rescue’ Conference – Gothenburg, June 2012 Interferry Tracked Incidents Action – IMO / Interferry MOU Bangladesh, Indonesia, … JWD - Personal research Press reports, blogs, official incident reports (e.g., NZ TAIC ‘Princess Ashika’) 800 lives lost each year - years 2000 - 2011 Ship deemed to be Unsafe (Source - Rabaul Queen Commission of Inquiry Report) our A ship shall be deemed to be unsafe where the Authority is of the opinion that, by reason of– (a) the defective condition of the hull, machinery or equipment; or (b) undermanning; or (c) improper loading; or (d) any other matter, the ship is unfit to go to sea without danger to life having regard to the voyage which is proposed.’ The Ocean Ranger Feb 15, 1982 – Newfoundland – 84 lives lost “Time & time again we are shocked by a new disaster…” “We say we will never forget” “Then we forget” “And it happens again” ‘The Ocean Ranger’ - Prof. Susan Dodd, University of Kings College, 2012 The Ocean Ranger Feb 15, 1982 – Newfoundland – 84 lives lost “the many socio-political forces which contributed to the loss, and which conspired to deal with the public outcry afterwards.” “Governments will not regulate unless ‘the public’ demands that they do so.” ‘The Ocean Ranger’ - Prof. -

ICMM's Hazard Assessment of Ores and Concentrates for Marine
April 2021 HAZARD ASSESSMENT OF ORES AND CONCENTRATES FOR MARINE TRANSPORT Guidance, 2021 Hazard Assessment of Ores and Concentrates for Marine Transport: 2nd edition a CONTENTS Foreword 1 Introduction 2 1. Principles of Hazard Classification 3 1.1 The objectives of hazard classification 3 1.2 Global Harmonization – the GHS 3 1.3 Basic approaches to classification 5 2. Hazard Assessment for Marine Transport 6 2.1 IMDG Code for marine transport of packaged goods 6 2.2 IMSBC Code for marine transport of solid bulk cargoes 7 2.3 MARPOL Annex V and marine transport of solid bulk cargoes 8 3. Hazard classification of ores and concentrates 11 3.1 Characterization of the composition of ores and concentrates 11 3.2 Collection of data for hazard classification 11 3.3 Tiered environmental classification approach 12 3.4 Assessment of human health endpoints 14 3.4.1 Acute toxicity 14 3.4.2 Skin corrosion/irritation, serious eye damage/eye irritation, respiratory sensitization 15 3.4.3 Chronic toxicity 15 3.4.4 MARPOL health-related HME criteria 16 3.4.5 Physical hazards 17 Conclusions 18 Further Information 19 Contact points 19 Acronyms 19 References 20 Acknowledgements 21 Publication: ©ICMM 2021. All rights reserved. Cover image: ©Chris Pagan/Unsplash b International Council on Mining and Metals FOREWORD Appropriate hazard assessment is the first step in ensuring that goods of all sorts can be safely produced, transported and used for their intended purpose. It is essential for ensuring that any potential physical, environmental and health risks can be properly managed throughout the supply chain. -

A Modeling Study of the Impact of the 2007 Greek Forest Fires on The
Atmospheric Research 149 (2014) 1–17 Contents lists available at ScienceDirect Atmospheric Research journal homepage: www.elsevier.com/locate/atmos A modeling study of the impact of the 2007 Greek forest fires on the gaseous pollutant levels in the Eastern Mediterranean A. Poupkou a,⁎, K. Markakis a, N. Liora a, T.M. Giannaros a,2, P. Zanis b,U.Imc,1, N. Daskalakis c,d, S. Myriokefalitakis c, J.W. Kaiser e,f,g, D. Melas a, M. Kanakidou c, T. Karacostas b, C. Zerefos h,i a Laboratory of Atmospheric Physics, Department of Physics, Aristotle University of Thessaloniki, Thessaloniki 54124, Greece b Department of Meteorology and Climatology, School of Geology, Aristotle University of Thessaloniki, Thessaloniki, Greece c Environmental Chemical Processes Laboratory, Department of Chemistry, University of Crete, Irakleio, Greece d Foundation for Research and Technology — Hellas, Institute of Chemical Engineering Sciences, Patras, Greece e King's College London, London, United Kingdom f European Centre for Medium-Range Weather Forecasts, Reading, United Kingdom g Max Planck Institute for Chemistry, Mainz, Germany h Research Centre for Atmospheric Physics and Climatology, Academy of Athens, Athens, Greece i Navarino Environmental Observatory (N.E.O.), Messinia, Greece article info abstract Article history: The main objective of the present study is the assessment of the non-radiative impact on the Received 21 January 2014 lower troposphere air quality of the intense biomass burning events that took place in the Eastern Received in revised form 15 May 2014 Mediterranean, when wild forest fires were burning in Peloponnesus (Greece) at the end of Accepted 15 May 2014 August 2007. -
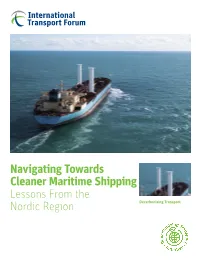
Navigating Towards Cleaner Maritime Shipping Lessons from the Nordic Region
CPB Corporate Partnership Board Navigating Towards Cleaner Maritime Shipping Lessons From the Nordic Region Decarbonising Transport Navigating Towards Cleaner Maritime Shipping Lessons From the Nordic Region Decarbonising Transport This report was funded by Nordic Energy Research, the platform for cooperative energy research and policy development under the auspices of the Nordic Council of Ministers. The International Transport Forum The International Transport Forum is an intergovernmental organisation with 62 member countries. It acts as a think tank for transport policy and organises the Annual Summit of transport ministers. ITF is the only global body that covers all transport modes. The ITF is politically autonomous and administratively integrated with the OECD. The ITF works for transport policies that improve peoples’ lives. Our mission is to foster a deeper understanding of the role of transport in economic growth, environmental sustainability and social inclusion and to raise the public profile of transport policy. The ITF organises global dialogue for better transport. We act as a platform for discussion and pre- negotiation of policy issues across all transport modes. We analyse trends, share knowledge and promote exchange among transport decision-makers and civil society. The ITF’s Annual Summit is the world’s largest gathering of transport ministers and the leading global platform for dialogue on transport policy. The Members of the Forum are: Albania, Armenia, Argentina, Australia, Austria, Azerbaijan, Belarus, Belgium, -

Secretariat GENERAL
UNITED NATIONS ST Distr. Secretariat GENERAL ST/SG/AC.10/C.4/2006/21 21 September 2006 Original: ENGLISH COMMITTEE OF EXPERTS ON THE TRANSPORT OF DANGEROUS GOODS AND ON THE GLOBALLY HARMONIZED SYSTEM OF CLASSIFICATION AND LABELLING OF CHEMICALS Sub-Committee of Experts on the Globally Harmonized System of Classification and Labelling of Chemicals Twelfth session, 12(p.m.)-14 December 2006 Item 3 (d) of the provisional agenda HAZARD COMMUNICATION ISSUES Miscellaneous proposals Safety Data Sheets Transport information for substances carried in bulk according to IMO Convention MARPOL ANNEX II Transmitted by the expert from the United Kingdom Background 1. Paragraph 1.1.1.6 (c) of the Globally Harmonized System of Classification and Labelling of Chemicals (GHS) outlines the aims of a Globally Harmonized System and states the relevance to the means of transport. Annex 4 gives guidance on the preparation of Safety Data Sheets (SDSs) and more specifically Section 14 (Transport information) which outlines the information pertinent to transport. 2. Bulk liquid chemical products offered for maritime transport are regulated in accordance with Annex II – regulations for the control of pollution by noxious liquid substances to IMO’s International Convention for the Prevention of Pollution from Ships, 1973, as modified by the Protocol of 1978 relating thereto (MARPOL 73/78) or in short form “Annex II to MARPOL 73/78 and IMO’s “International Code for the Construction and Equipment of Ships carrying Dangerous Chemicals in Bulk” in short form known as the “IBC Code”. It should be GE.06- ST/SG/AC.10/C.4/2006/21 page 2 noted that such transport is specifically not addressed in the UN Model Regulations on the Transport of Dangerous Goods. -
EU Legislation in Progress
BRIEFING EU Legislation in Progress Port reception facilities for ship waste Collecting waste from ships in ports OVERVIEW Marine litter and pollution put the marine environment at risk. While a great proportion of marine litter originates from land-based sources, limiting waste discharges from ships also plays an essential role in efforts to preserve marine and coastal ecosystems. Based on international law, EU legislation requires vessels to bring the waste they generate on voyages to waste-reception facilities in port, and obliges EU ports to provide such facilities to ships using the port. Despite these developments, discharges at sea continue. In January 2018, the European Commission put forward a new legislative proposal seeking to improve the collection of ship waste while ensuring efficient maritime transport operations in ports. Interinstitutional negotiations concluded on 13 December 2018. The final text was adopted by the Parliament on 13 March 2019 and then by the Council on 29 March. The Directive was then signed on 17 April by the presidents of the two institutions and Member States have until 28 June 2021 to transpose it into national law. Proposal for a Directive of the European Parliament and of the Council on port reception facilities for the delivery of waste from ships, repealing Directive 2000/59/EC and amending Directive 2009/16/EC and Directive 2010/65/EU Committee responsible: Committee on Transport and Tourism (TRAN) COM(2018)033 16.1.2018 Associated committee : Committee on Environment, Public Health 2018/0012(COD) and Food Safety (ENVI) Rapporteur: Gesine Meissner (ALDE, Germany) Ordinary legislative Shadow rapporteurs: Deirdre Clune (EPP, Ireland) procedure (COD) Maria Grapini (ALDE, Romania) (Parliament and Peter van Dalen (ECR, Netherlands) Council on equal Tania González Peñas (GUE/NGL, Spain) footing – formerly Keith Taylor (Greens/EFA, United Kingdom) 'co-decision') Rosa D’Amato (EFDD, Italy) Rolandas Paksas (EFDD, Lithuania) Procedure completed. -
Basic Concepts of Maritime Transport and Its Present Status in Latin America and the Caribbean
or. iH"&b BASIC CONCEPTS OF MARITIME TRANSPORT AND ITS PRESENT STATUS IN LATIN AMERICA AND THE CARIBBEAN . ' ftp • ' . J§ WAC 'At 'li ''UWD te. , • • ^ > o UNITED NATIONS 1 fc r> » t 4 CR 15 n I" ti i CUADERNOS DE LA CEP AL BASIC CONCEPTS OF MARITIME TRANSPORT AND ITS PRESENT STATUS IN LATIN AMERICA AND THE CARIBBEAN ECONOMIC COMMISSION FOR LATIN AMERICA AND THE CARIBBEAN UNITED NATIONS Santiago, Chile, 1987 LC/G.1426 September 1987 This study was prepared by Mr Tnmas Sepûlveda Whittle. Consultant to ECLAC's Transport and Communications Division. The opinions expressed here are the sole responsibility of the author, and do not necessarily coincide with those of the United Nations. Translated in Canada for official use by the Multilingual Translation Directorate, Trans- lation Bureau, Ottawa, from the Spanish original Los conceptos básicos del transporte marítimo y la situación de la actividad en América Latina. The English text was subse- quently revised and has been extensively updated to reflect the most recent statistics available. UNITED NATIONS PUBLICATIONS Sales No. E.86.II.G.11 ISSN 0252-2195 ISBN 92-1-121137-9 * « CONTENTS Page Summary 7 1. The importance of transport 10 2. The predominance of maritime transport 13 3. Factors affecting the shipping business 14 4. Ships 17 5. Cargo 24 6. Ports 26 7. Composition of the shipping industry 29 8. Shipping conferences 37 9. The Code of Conduct for Liner Conferences 40 10. The Consultation System 46 * 11. Conference freight rates 49 12. Transport conditions 54 13. Marine insurance 56 V 14. -

Maritime Transport & High Seas Governance
APEC Marine Debris risks, regulation & the IMO regime Shipping in society & the global economy • Global, multi-national & gargantuan • Carries >90% world trade • Underpins global economic development • 85,000 ships in world fleet • 5.4 billion tonnes cargo / year • Modern society totally shipping dependant • Shipping /fishing most intensive human use of the seas • Active in all maritime zones Environmental impacts of shipping • Shipping most energy-efficient, cost- effective & ecologically sound mode of freight transport • Net environmental costs/benefits per unit cargo carried • However, can still cause major impacts Environmental impacts of shipping Different ship types = different impacts, e.g.: Tankers – risk of major spills, little sewage & garbage Cruise liners – minor risk of spills, major sewage & garbage Pollution accidents & emergencies • Global media focus • However, not a severe as ongoing, chronic pollution such as ‘operational’ discharges, inc. garbage / marine debris Garbage / marine debris • 6.4 million tonnes / year globally • 5.6 million tonnes from shipping • 46,000 pieces of plastic / square mile • 3 x more garbage into ocean as fish taken out • N Pacific – 6 pounds of plastic for every pound of plankton near surface • Significant wildlife impacts • Transfer fouling species • High seas convergence zones International regulatory regime UNCLOS: • 69 of 320 Articles relate directly to shipping • Freedom of navigation • Right of innocent passage • Flag State control • Part XII – inc. controls on pollution & discharges -

Estimated Health Impacts from Maritime Transport in the Mediterranean Region and Benefits from the Use of Cleaner Fuels
Environment International 138 (2020) 105670 Contents lists available at ScienceDirect Environment International journal homepage: www.elsevier.com/locate/envint Estimated health impacts from maritime transport in the Mediterranean region and benefits from the use of cleaner fuels T ⁎ M. Vianaa, , V. Rizzab, A. Tobíasa, E. Carrc, J. Corbettd,M.Sofieve, A. Karanasioua, G. Buonannob,f, N. Fanng a Institute of Environmental Assessment and Water Research (IDAEA-CSIC), Barcelona, Spain b Department of Civil and Mechanical Engineering, University of Cassino and Southern Lazio, Cassino (FR), Italy c Energy and Environmental Research Associates, LLC, Pittsford, NY, United States d College of Earth, Ocean, and Environment, University of Delaware, Newark, DE, United States e Finnish Meteorological Institute (FMI), Helsinki, Finland f Queensland University of Technology, Brisbane, Australia g Office of Air Quality Planning and Standards, U.S. Environmental Protection Agency, Washington, DC, United States ARTICLE INFO ABSTRACT Keywords: Ship traffic emissions degrade air quality in coastal areas and contribute to climate impacts globally. The esti- Ports mated health burden of exposure to shipping emissions in coastal areas may inform policy makers as they seek to Source apportionment reduce exposure and associated potential health impacts. This work estimates the PM2.5-attributable impacts in Maritime transport the form of premature mortality and cardiovascular and respiratory hospital admissions, from long-term ex- Clean air posure to shipping emissions. Health impact assessment (HIA) was performed in 8 Mediterranean coastal cities, Mitigation using a baseline conditions from the literature and a policy case accounting for the MARPOL Annex VI rules Policy Low sulphur requiring cleaner fuels in 2020. -

Review of Maritime Transport 2016 Review of Maritime Transport
UNCTAD UNITED NATIONS CONFERENCE ON TRADE AND DEVELOPMENT REVIEW OF MARITIME TRANSPORT For further information on UNCTAD’s work REVIEW on trade logistics, please visit: http://unctad.org/ttl OF MARITIME and for the TRANSPORT Review of Maritime Transport 2016: http://unctad.org/rmt E-mail: 2016 [email protected] To read more and to subscribe to the UNCTAD Transport Newsletter, please visit: http://unctad.org/transportnews 2016 UNITED NATIONS ISBN 978-92-1-112904-5 Layout and printed at United Nations, Geneva 1623510 (E)–November 2016 – 2,102 UNCTAD/RMT/2016 United Nations publication Sales No. E.16.II.D.7 : © Jan Hoffmann Photo credit UNITED NATIONS CONFERENCE ON TRADE AND DEVELOPMENT REVIEW OF MARITIME TRANSPORT 2016 New York and Geneva, 2016 ii REVIEW OF MARITIME TRANSPORT 2016 NOTE The Review of Maritime Transport is a recurrent publication prepared by the UNCTAD secretariat since 1968 with the aim of fostering the transparency of maritime markets and analysing relevant developments. Any factual or editorial corrections that may prove necessary, based on comments made by Governments, will be reflected in a corrigendum to be issued subsequently. * * * Symbols of United Nations documents are composed of capital letters combined with figures. Use of such a symbol indicates a reference to a United Nations document. * * * The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. -

Port Waste Management in the Baltic Sea Area: a Four Port Study on the Legal Requirements, Processes and Collaboration
sustainability Article Port Waste Management in the Baltic Sea Area: A Four Port Study on the Legal Requirements, Processes and Collaboration Irina Svaetichin 1 and Tommi Inkinen 2,* 1 Department of Geosciences and Geography, University of Helsinki, P.O. Box 64, Helsinki 00014, Finland; [email protected] or Irina Svaetichin@helsinki.fi 2 Centre for Maritime Studies of the Brahea Centre, University of Turku, Turku 20014, Finland * Correspondence: tommi.inkinen@utu.fi; Tel.: +358-400-882-818 Academic Editor: Mary J. Thornbush Received: 27 March 2017; Accepted: 26 April 2017; Published: 28 April 2017 Abstract: The cruise ship industry has become a well-implemented industry in the Baltic Sea area, and each year, the number of cruise ship passengers rises steadily. Efficient waste management in cruising ports around the Baltic Sea is a crucial element in minimizing environmental impacts. This research involves the four selected ports of Copenhagen, Helsinki, Stockholm and Tallinn. The study applies statistics and interview data to the analysis of waste management systems for cruise ship-generated waste. The interview data involves 12 executives and professionals responsible for environmental issues and decision making in their respective ports. The interviews highlighted the need for standardized environmental legislation and related procedures, which would result in coherent measurement systems. These systems would enable transparent environmental monitoring, thus maintaining the ports’ competitiveness. A common environmental legislation would support the emerging waste management system for the whole Baltic Sea area. The study suggests that ports should focus on handling specific types of wastes and collaborate as a spatial network. Specialization to allow the discharge of certain fractions of waste is essential.