Electronic Automatic Transmission for Bicycle Final Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cargo Bikes As a Growth Area for Bicycle Vs. Auto Trips: Exploring the Potential for Mode Substitution Behavior
Transportation Research Part F 43 (2016) 48–55 Contents lists available at ScienceDirect Transportation Research Part F journal homepage: www.elsevier.com/locate/trf Cargo bikes as a growth area for bicycle vs. auto trips: Exploring the potential for mode substitution behavior William Riggs Department of City and Regional Planning, College of Architecture and Environmental Design, California Polytechnic State University, 1 Grand Ave., San Luis Obispo, CA 93405, United States article info abstract Article history: Cargo bikes are increasing in availability in the United States. While a large body of Received 26 February 2015 research continues to investigate traditional bike transportation, cargo bikes offer the Received in revised form 15 August 2016 potential to capture trips for those that might otherwise be made by car. Data from a sur- Accepted 18 September 2016 vey of cargo bike users queried use and travel dynamics with the hypothesis that cargo and Available online 6 October 2016 e-cargo bike ownership has the potential to contribute to mode substitution behavior. From a descriptive standpoint, 68.9% of those surveyed changed their travel behavior after Keywords: purchasing a cargo bike and the number of auto trips appeared to decline by 1–2 trips per Cargo bikes day, half of the auto travel prior to ownership. Two key reasons cited for this change Bicycles Linked trips include the ability to get around with children and more gear. Regression models that Mode choice underscore this trend toward increased active transport confirm this. Based on these results, further research could include focus on overcoming weather-related/elemental barriers, which continue to be an obstacle to every day cycling, and further investigation into families modeling healthy behaviors to children with cargo bikes. -

Olathe's Bike Share Implementation Strategy
CITY OF OLATHE + MARC Bike Share Implementation Strategy FEBRUARY 2018 Bike Share Implementation Strategy | 1 2 | City of Olathe Acknowledgements Project Partners Advisory Committee City of Olathe John Andrade – Parks & Recreation Foundation Mid America Regional Council Tim Brady – Olathe Schools Marvin Butler – Fire Captain/Inspector Emily Carrillo – Neighborhood Planning City Staff Coordinator Mike Fields – Community Center Manager Susan Sherman – Assistant City Manager Ashley Follett – Johnson County Department of Michael Meadors – Parks & Recreation Director Health and Enviroment Brad Clay – Deputy Director Parks & Recreation Megan Foreman – Johnson County Department Shawna Davis – Management Intern of Health and Enviroment Lisa Donnelly – Park Project Planner Bubba Goeddert – Olathe Chamber of Commerce Mike Latka – Park Project Coordinator Ben Hart – Parks & Recreation Foundation Linda Voss – Sr. Traffic Engineer Katie Lange – Interpreter Specialist Matt Lee – Mid-America Nazarene University Consultant Team Laurel Lucas – Customer Service, Housing Megan Merryman – Johnson County Parks & BikeWalkKC Recreation District Alta Planning + Design Liz Newman – Sr. Horticulturist Vireo Todd Olmstead – Facility & Housing Assistant Manager Sean Pendley – Sr. Planner Kathy Rankin – Housing Services Manager Bryan Severns – K-State Olathe Jon Spence – Mid-America Nazarene University Drew Stihl – Mid-America Regional Council Brenda Volle – Program Coordinator, Housing Rob Wyrick – Olathe Health Bike Share Implementation Strategy | 3 4 | City of Olathe Table of Contents I. BACKGROUND 11 II. ANALYSIS 15 III. SYSTEM PLANNING 45 IV. IMPLEMENTATION 77 Bike Share Implementation Strategy | 5 6 | City of Olathe Executive Summary Project Goals System Options • Identify how bike share can benefit Olathe. • Bike Library: Bike libraries usually involve a fleet of bicycles that are rented out at a limited • Identify the local demand for bike share in number of staffed kiosks. -

CRANKSET BULLET Ultra
CRANKSET BULLET ULTRA 1 - TECHNICAL SPECIFICATIONS COMPACT CRANKSET 52/36 - 53/39 - 50/34 BOLT CIRCLE DIAMETER CHAIN LINE MINIMUM CHAINSTAY LENGHT AXLE THREADS 1.1 - CHAIN LINE SIZE • Chain line for double crankset (Fig. 1) LINEACHAIN CATENA LINE 1 2 - COMPATIBILITY CONTROL CRANKSET CHAIN REAR DERAILLEUR FRONT DERAILLEUR BULLET ULTRA 11S 1 BULLET ULTRA CRANKSET COMPONENTS TRIATHLON CRANKSET AXLE CENTRAL BOLT Screw in a clockwise direction 2.1 - PEDAL AXLE COMPATIBILITY WARNING! Do not insert washers between the pedal axle and the crank as MIN. 11,5 mm they would generate abnormal stresses in the interface area. These stresses could lead to premature failure, resulting in an accident, personal injury or death. WARNING! The contact face of the pedal axle must correspond with the data of Fig. 2. MIN. 17,5 mm The above characteristics are necessary to minimize abnormal stresses in the cranks. Such stresses could lead to premature failure, resulting in accidents, personal injury or death NOTE 2 Q-factor: 145,5 mm (nominal value). 3 - INTERFACE WITH THE FRAME 3.1 - Compatibility WITH BOTTOM BRACKET SHELLS • The Campagnolo® BULLET ULTRA crankset is compatible with shells having the following widths: TYPE Italian thread English thread 3 2 BULLET ULTRA CRANKSET COMPONENTS TRIATHLON 3.2 - DIMENSIONS FOR BULLET ULTRA CRANKSET 91.5 23.5 12.3 10.1 4.6 3.6 2.8 194.7 194.7 175 107 84.5 78.1 70.5 59.4 68 3 BULLET ULTRA CRANKSET COMPONENTS TRIATHLON 4 - ASSEMBLY NOTE TAKE CARE BECAUSE ASSEMBLY AND MAINTENANCE OF THE BULLET ultra CRANKSET IS THE SAME AS THE POWER-TOR- QUE SYSTEM CRANKSET. -

Canadian Rockies & Montana Packing List
Canadian Rockies & Montana Packing List Things to Know • Students should bring at least two reusable face masks on their trip. Overland will provide one additional mask. • Your group will have access to laundry periodically. • Please do not bring your smartphone (or any other electronics). • Do not bring any type of knife or multi-tool (such as a Swiss Army knife or Leatherman tool). • A high-visibility outer layer is required at all times while biking. See packing descriptions for more details. • If you are flying to your trip, pack your sleeping pad and bike shoes in your bike box or checked bag. Take your helmet and sleeping bag with you on the plane as carry-on items, in case your checked luggage fails to arrive on time. Pack all remaining items in your checked duffel bag or in your checked panniers. • There are no reimbursements for lost, damaged or stolen items. Participants Arriving Sick or Injured: Participants should not be dropped off or fly to trip start if they are sick or injured. Participants should remain at home until they are no longer ill and are fully recovered from any illness or injury. Sick or injured participants arriving for trip start must remain with the drop off parent/guardian or be flown home at the parent/guardian's expense. Please notify our office as soon as possible if your child is sick or injured. Your child may or may not be able to join the group at a later date. Please review the details of your trip insurance policy for illness and injury coverage benefits. -

Download Catalogue
NEO RANGE OVERVIEW GIRL’S BOY’S NEO 24 NEO 20 GEARED NEO 20 NEO 16 NEO 12 NEO JR NEO NEO 24 GIRL’S GEARED Industry leading lightweight bicycles SPECIFICATIONS FRAME Lightweight alloy frame with low BOTTOM Nutted bottom bracket WHEELS Lightweight alloy 32 hole double stand over height BRACKET wall rims with alloy hubs with nutted axles FORK 24” lightweight rigid 6061 alloy fork PEDALS High Impact plastic with 25.4 straight blades TYRES 24” x 1.5 slick F. DERAILLEUR N /A SADDLE Apollo youth saddle HEADSET Semi-sealed 1-1/8" A-head R. DERAILLEUR Shimano TX-35 SEATPOST / 27.2mm alloy micro adjust with HANDLEBAR Lightweight alloy low riser 560mm SHIFT LEVERS Shimano Revoshift 7 speed rear CLAMP quick release clamp GRIP Kraton grips CASSETTE Shimano MF TZ21 14-28T 7 speed EXTRAS Alloy kickstand HEADSTEM Alloy A-head 4 Bolt stem with Rise: freewheel 10° Bore: 25.4mm, L: 60mm. CHAIN KMC Z-51 CRANKSET Oversize 3 piece crank with 36T BRAKES Alloy linear pull brakes chainwheel and double chainguard Specifications may be subject to change at any time without notice. For the latest updated spec, please refer to apollobikes.com NEO NEO 24 BOY’S GEARED Industry leading lightweight bicycles SPECIFICATIONS FRAME Lightweight alloy frame with low BOTTOM Nutted bottom bracket WHEELS Lightweight alloy 32 hole double stand over height BRACKET wall rims with alloy hubs with nutted axles FORK 24” lightweight rigid 6061 alloy fork PEDALS High Impact plastic with 25.4 straight blades TYRES 24” x 1.5 slick F. DERAILLEUR N /A SADDLE Apollo youth saddle HEADSET Semi-sealed 1-1/8" A-head R. -

Dirt Adjustable Installation Instructions
Dirt Adjustable Installation Instructions Description: The K-Edge Dirt Adjustable series was designed to offer riders the freedom of choice between triple (Dirt 3), double (Dirt 2T), and double specific (Dirt 2) drivetrains while being able to utilize a K-Edge chain catcher for any of those situations with the simple 'swap' of a pad. Furthermore, it was designed to give the rider adjustability depending on his/her crankset configuration. Compatibility: The K-Edge Dirt Adjustable series can be used with cranksets compatible with an 'E-Type' or 'Bottom Bracket Mount' front derailleur utilizing external bottom bracket cups or NON-GXP bottom brackets. This device cannot be used in conjunction with an 'E-Type' front derailleur as it is mounted in the same location. Chainring Size Range: Dirt 3 Adjustable Pad: 22T-26T Dirt 2T Adjustable Pad: 32T-36T Dirt 2 Adjustable Pad: 26T-30T Warnings: All K-Edge products are to be installed by a professional bicycle mechanic. These instructions are generalized to accommodate a wide range of setups for a bike, if your setup does not match what is being described take extra care in the process of your setup and contact K-Edge Support if you have any questions. Improper installation of any K-Edge product or use outside of its design intentions could lead not only to damaging the bike but could also cause personal injury to the rider. Parts Included: 1x Dirt Adjustable Body 3x 0.5mm Nylon Spacers 1x Dirt Pad 1x M3 x 0.5 x 6mm SS Bolt Tools/Items Required: Manufacturer's Instructions with torque specs for Crankset and Bottom Bracket Bottom Bracket Tool Torque Wrench Metric Allen Set (2mm for Pad) Installation Steps: 1. -

Kewanee's Love Affair with the Bicycle
February 2020 Kewanee’s Love Affair with the Bicycle Our Hometown Embraced the Two-Wheel Mania Which Swept the Country in the 1880s In 1418, an Italian en- Across Europe, improvements were made. Be- gineer, Giovanni Fontana, ginning in the 1860s, advances included adding designed arguably the first pedals attached to the front wheel. These became the human-powered device, first human powered vehicles to be called “bicycles.” with four wheels and a (Some called them “boneshakers” for their rough loop of rope connected by ride!) gears. To add stability, others experimented with an Fast-forward to 1817, oversized front wheel. Called “penny-farthings,” when a German aristo- these vehicles became all the rage during the 1870s crat and inventor, Karl and early 1880s. As a result, the first bicycle clubs von Drais, created a and competitive races came into being. Adding to two-wheeled vehicle the popularity, in 1884, an Englishman named known by many Thomas Stevens garnered notoriety by riding a names, including Drais- bike on a trip around the globe. ienne, dandy horse, and Fontana’s design But the penny-farthing’s four-foot high hobby horse. saddle made it hazardous to ride and thus was Riders propelled Drais’ wooden, not practical for most riders. A sudden 50-pound frame by pushing stop could cause the vehicle’s mo- off the ground with their mentum to send it and the rider feet. It didn’t include a over the front wheel with the chain, brakes or pedals. But rider landing on his head, because of his invention, an event from which the Drais became widely ack- Believed to term “taking a header” nowledged as the father of the be Drais on originated. -

How to Build a 36 Spoke Bicycle Wheel
How to build a 36 spoke bicycle wheel. You’ll need: Hub & rim (for 36 spokes) 36 spokes & nipples. Spoke wrench & small flat screwdriver) How it’s done: 1.1) Insert spokes into every other hole on one side of the hub - spokes turning towards hub. 1.2) Locate the valve hole (the only hole larger than the others). Insert a random spoke into the hole right next to the valvehole, on the right side and screw on a nipple - be Figure 1.2 sure to only screw on a few turns, using your fingers or a small screwdriver Insert the next spoke into the forth hole, from the one you’ve just used. (See figure 1.2) 1 2 Flip “wheel”. 2.1) As 1.1, but be sure to place the spokes, just right of the spokes on the other side of the hub. This part is very important. 2,2) Insert spokes, starting at the valvehole (again), just right of the spokes from the other side. (See figure 2.2) Figure 2.2 3 Flip “wheel”. 3.1) Insert spokes in the last 9 holes. This time away from the hub. 3.2) Twist hub towards left. Spokes will turn left towards the rim, instead of straight. Follow the pattern “Over, over, under and skip a hole” (there’ll be only two holes left for the spoke to fit in) to insert the spokes in the rim. The spokes should turn the opposite direction of the ones already in the rim. (See figure 3.2) Figure 3.2 Over red and blue, under red, skip a hole. -

BICYCLE RACING Road Racing - TOUR DE FRANCE BIGGIST, HARDEST and MOST PRESTEGIOUS BIKE RACE in the WORLD • 21 DAYS • 2000+ MILES • SINCE 1903
BICYCLE RACING Road racing - TOUR DE FRANCE BIGGIST, HARDEST AND MOST PRESTEGIOUS BIKE RACE IN THE WORLD • 21 DAYS • 2000+ MILES • SINCE 1903 Each year the course changes • 20 Stages Regular road stage (mass start - 16) Team time trial (1) Individual time trial (3) • Lowest overall time wins • Race is a team competition Peloton (pack) – mass start stage race INDIVIDIAL TIME TRIAL • Start 1 racer at the time with 2 min intervals • no drafting allowed • special aerodynamic bike, suite and helmet TEAM TIME TRIAL AERODYNAMICS AERODYNAMIC DRAG • Air pressure drag • Direct friction Rider can safe up to 40% of energy by drafting behind other riders Mountain bike racing Cyclo-cross The original two cycling disciplines – Road race and Track cycling – were included in the first Olympic Games of modern times in Athens in 1896 Olympic medallists Olympic medallists Gold Medallists in the 2000 Olympic Games Gold Medallists in the 2000 Olympic Games Cycling Road Cycling Road Event Athletes Event Athlete Individual Time Men Jan Ullrich, (Germany) s Trial Women Leontien Van Moorsel (Netherlands) Individ Men Jan Ullrich, (Germany) Leontien Van Moorsel (Netherlands) ual IndividualWomen Men Viacheslav Ekimov (Russia) Road Race Time Women Leontien Van Moorsel Trial (Netherlands) Individ Men Viacheslav Ekimov (Russia) ual Women Leontien Van Moorsel (Netherlands) Road Race Track Cycling Event Athletes 1km Individual Men Jason Queally (Great Britain) Time Trial 500m Individual Women Felicia Ballanger (France) Time Trial Men Marty Nothstein (USA) Sprint Women -

Bicycle Manual Road Bike
PURE CYCLING MANUAL ROAD BIKE 1 13 14 2 3 15 4 a 16 c 17 e b 5 18 6 19 7 d 20 8 21 22 23 24 9 25 10 11 12 26 Your bicycle and this manual comply with the safety requirements of the EN ISO standard 4210-2. Important! Assembly instructions in the Quick Start Guide supplied with the road bike. The Quick Start Guide is also available on our website www.canyon.com Read pages 2 to 10 of this manual before your first ride. Perform the functional check on pages 11 and 12 of this manual before every ride! TABLE OF CONTENTS COMPONENTS 2 General notes on this manual 67 Checking and readjusting 4 Intended use 67 Checking the brake system 8 Before your first ride 67 Vertical adjustment of the brake pads 11 Before every ride 68 Readjusting and synchronising 1 Frame: 13 Stem 13 Notes on the assembly from the BikeGuard 69 Hydraulic disc brakes a Top tube 14 Handlebars 16 Packing your Canyon road bike 69 Brakes – how they work and what to do b Down tube 15 Brake/shift lever 17 How to use quick-releases and thru axles about wear c Seat tube 16 Headset 17 How to securely mount the wheel with 70 Adjusting the brake lever reach d Chainstay 17 Fork quick-releases 71 Checking and readjusting e Rear stay 18 Front brake 19 How to securely mount the wheel with 73 The gears 19 Brake rotor thru axles 74 The gears – How they work and how to use 2 Saddle 20 Drop-out 20 What to bear in mind when adding them 3 Seat post components or making changes 76 Checking and readjusting the gears 76 Rear derailleur 4 Seat post clamp Wheel: 21 Special characteristics of carbon 77 -
Electronic Automatic Transmission for Bicycle Design Document
Electronic Automatic Transmission for Bicycle Design Document Tianqi Liu, Ruijie Qi, and Xingkai Zhou Team 4 ECE 445 – Spring 2018 TA: Hershel Rege 1 Introduction 1.1 Objective Nowadays, an increasing number of people commute by bicycles in US. With the development of technology, bicycles that equipped with the transmission system including chain rings, front derailleur, cassettes, and rear derailleur, are more and more widespread. However, it is a challenging thing for most bikers to decide which is the optimal gear under various circumstances and when to change gear. Thus, electronic automatic transmission for bicycle can satisfy the need of most inexperienced bikers. There are three main advantages to use with automatic transmission system. Firstly, it can make your journey more comfortably. Except for expert bikers, many people cannot select the right gear unconsciously. Moreover, with so many traffic signals and stop signs in the city, bikers have to change gears very frequently to stop and restart. However, with this system equipped in the bicycle, bikers can only think about pedalling. Secondly, electronic automatic gear shifting system can guarantee bikers a safer journey. It is dangerous for a rider to shift gears manually under some specific conditions such as braking, accelerating. Thirdly, bikers can ride more efficiently. With the optimal gear ready, the riders could always paddle at an efficient range of cadence. For those inexperienced riders who choose the wrong gears, they will either paddle too slow which could exhaust themselves quickly or paddle too fast which makes the power delivery inefficiently. Bicycle changes gears by pulling or releasing a metal cable connected to the derailleurs. -
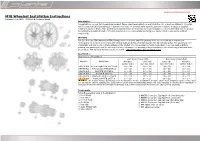
MTB Wheelset Installation Instructions .Pdf
MTB Wheelset Installation Instructions Published – Oct, 2015. ZS175.v1 © Full Speed Ahead Introduction Congratulations on your Full Speed Ahead product. Please read these instructions and follow them for correct use. Failure to follow the warnings and instructions could result in damage to product not covered under warranty, damage to bicycle; or cause an accident resulting in injury or death. Since specific tools and experience are necessary for proper installation, it is recommended that the product be installed by a qualified bicycle technician. FSA assumes no responsibility for damages or injury related to improperly installed components. Warranty Full Speed Ahead (FSA) warrants all FSA, Gravity, Vision, Metropolis and RPM products to be free from defects in materials or workmanship for a period of two years after original purchase unless otherwise stated in the full warranty policy. The warranty is non- transferable and valid to the original purchaser of the product only. Any attempt to modify the product in any way such as drilling, grinding, and painting will void the warranty. For more information on warranty policy and instructions for completing a warranty claim, check out the Full Warranty Policy found at our website: http://www.fullspeedahead.com/techdoc Specification Item Number / Model Name Front spoke tension (kfg) Rear Spoke tension (kgf) Model No. Model Name Non-drive Drive side Drive side Non-drive (w/disc brake) (w/o disc brake) (w/o disc brake) (w/disc brake) WH-TX-910 K-Force Light MTB 27.5”/650b 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-920 K-Force Light MTB 29”/700c 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-905 SL-K MTB 27.5”/650b 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-915 SL-K MTB 29”/700c 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-908 Afterburner MTB 27.5”/650b 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-918 Afterburner MTB 29”/700c 100 – 120 100 – 120 110 – 130 80 – 100 Use a spoke tension measuring device to follow the tension specification as in the above chart.