Arxiv:1605.08669V1 [Math.NA] 27 May 2016 Ain Iglrt,Dul Point
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![Arxiv:1912.10980V2 [Math.AG] 28 Jan 2021 6](https://docslib.b-cdn.net/cover/2906/arxiv-1912-10980v2-math-ag-28-jan-2021-6-82906.webp)
Arxiv:1912.10980V2 [Math.AG] 28 Jan 2021 6
Automorphisms of real del Pezzo surfaces and the real plane Cremona group Egor Yasinsky* Universität Basel Departement Mathematik und Informatik Spiegelgasse 1, 4051 Basel, Switzerland ABSTRACT. We study automorphism groups of real del Pezzo surfaces, concentrating on finite groups acting with invariant Picard number equal to one. As a result, we obtain a vast part of classification of finite subgroups in the real plane Cremona group. CONTENTS 1. Introduction 2 1.1. The classification problem2 1.2. G-surfaces3 1.3. Some comments on the conic bundle case4 1.4. Notation and conventions6 2. Some auxiliary results7 2.1. A quick look at (real) del Pezzo surfaces7 2.2. Sarkisov links8 2.3. Topological bounds9 2.4. Classical linear groups 10 3. Del Pezzo surfaces of degree 8 10 4. Del Pezzo surfaces of degree 6 13 5. Del Pezzo surfaces of degree 5 16 arXiv:1912.10980v2 [math.AG] 28 Jan 2021 6. Del Pezzo surfaces of degree 4 18 6.1. Topology and equations 18 6.2. Automorphisms 20 6.3. Groups acting minimally on real del Pezzo quartics 21 7. Del Pezzo surfaces of degree 3: cubic surfaces 28 Sylvester non-degenerate cubic surfaces 34 7.1. Clebsch diagonal cubic 35 *[email protected] Keywords: Cremona group, conic bundle, del Pezzo surface, automorphism group, real algebraic surface. 1 2 7.2. Cubic surfaces with automorphism group S4 36 Sylvester degenerate cubic surfaces 37 7.3. Equianharmonic case: Fermat cubic 37 7.4. Non-equianharmonic case 39 7.5. Non-cyclic Sylvester degenerate surfaces 39 8. Del Pezzo surfaces of degree 2 40 9. -
![Real Rank Two Geometry Arxiv:1609.09245V3 [Math.AG] 5](https://docslib.b-cdn.net/cover/0085/real-rank-two-geometry-arxiv-1609-09245v3-math-ag-5-170085.webp)
Real Rank Two Geometry Arxiv:1609.09245V3 [Math.AG] 5
Real Rank Two Geometry Anna Seigal and Bernd Sturmfels Abstract The real rank two locus of an algebraic variety is the closure of the union of all secant lines spanned by real points. We seek a semi-algebraic description of this set. Its algebraic boundary consists of the tangential variety and the edge variety. Our study of Segre and Veronese varieties yields a characterization of tensors of real rank two. 1 Introduction Low-rank approximation of tensors is a fundamental problem in applied mathematics [3, 6]. We here approach this problem from the perspective of real algebraic geometry. Our goal is to give an exact semi-algebraic description of the set of tensors of real rank two and to characterize its boundary. This complements the results on tensors of non-negative rank two presented in [1], and it offers a generalization to the setting of arbitrary varieties, following [2]. A familiar example is that of 2 × 2 × 2-tensors (xijk) with real entries. Such a tensor lies in the closure of the real rank two tensors if and only if the hyperdeterminant is non-negative: 2 2 2 2 2 2 2 2 x000x111 + x001x110 + x010x101 + x011x100 + 4x000x011x101x110 + 4x001x010x100x111 −2x000x001x110x111 − 2x000x010x101x111 − 2x000x011x100x111 (1) −2x001x010x101x110 − 2x001x011x100x110 − 2x010x011x100x101 ≥ 0: If this inequality does not hold then the tensor has rank two over C but rank three over R. To understand this example geometrically, consider the Segre variety X = Seg(P1 × P1 × P1), i.e. the set of rank one tensors, regarded as points in the projective space P7 = 2 2 2 7 arXiv:1609.09245v3 [math.AG] 5 Apr 2017 P(C ⊗ C ⊗ C ). -

Combination of Cubic and Quartic Plane Curve
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728,p-ISSN: 2319-765X, Volume 6, Issue 2 (Mar. - Apr. 2013), PP 43-53 www.iosrjournals.org Combination of Cubic and Quartic Plane Curve C.Dayanithi Research Scholar, Cmj University, Megalaya Abstract The set of complex eigenvalues of unistochastic matrices of order three forms a deltoid. A cross-section of the set of unistochastic matrices of order three forms a deltoid. The set of possible traces of unitary matrices belonging to the group SU(3) forms a deltoid. The intersection of two deltoids parametrizes a family of Complex Hadamard matrices of order six. The set of all Simson lines of given triangle, form an envelope in the shape of a deltoid. This is known as the Steiner deltoid or Steiner's hypocycloid after Jakob Steiner who described the shape and symmetry of the curve in 1856. The envelope of the area bisectors of a triangle is a deltoid (in the broader sense defined above) with vertices at the midpoints of the medians. The sides of the deltoid are arcs of hyperbolas that are asymptotic to the triangle's sides. I. Introduction Various combinations of coefficients in the above equation give rise to various important families of curves as listed below. 1. Bicorn curve 2. Klein quartic 3. Bullet-nose curve 4. Lemniscate of Bernoulli 5. Cartesian oval 6. Lemniscate of Gerono 7. Cassini oval 8. Lüroth quartic 9. Deltoid curve 10. Spiric section 11. Hippopede 12. Toric section 13. Kampyle of Eudoxus 14. Trott curve II. Bicorn curve In geometry, the bicorn, also known as a cocked hat curve due to its resemblance to a bicorne, is a rational quartic curve defined by the equation It has two cusps and is symmetric about the y-axis. -

Polynomial Curves and Surfaces
Polynomial Curves and Surfaces Chandrajit Bajaj and Andrew Gillette September 8, 2010 Contents 1 What is an Algebraic Curve or Surface? 2 1.1 Algebraic Curves . .3 1.2 Algebraic Surfaces . .3 2 Singularities and Extreme Points 4 2.1 Singularities and Genus . .4 2.2 Parameterizing with a Pencil of Lines . .6 2.3 Parameterizing with a Pencil of Curves . .7 2.4 Algebraic Space Curves . .8 2.5 Faithful Parameterizations . .9 3 Triangulation and Display 10 4 Polynomial and Power Basis 10 5 Power Series and Puiseux Expansions 11 5.1 Weierstrass Factorization . 11 5.2 Hensel Lifting . 11 6 Derivatives, Tangents, Curvatures 12 6.1 Curvature Computations . 12 6.1.1 Curvature Formulas . 12 6.1.2 Derivation . 13 7 Converting Between Implicit and Parametric Forms 20 7.1 Parameterization of Curves . 21 7.1.1 Parameterizing with lines . 24 7.1.2 Parameterizing with Higher Degree Curves . 26 7.1.3 Parameterization of conic, cubic plane curves . 30 7.2 Parameterization of Algebraic Space Curves . 30 7.3 Automatic Parametrization of Degree 2 Curves and Surfaces . 33 7.3.1 Conics . 34 7.3.2 Rational Fields . 36 7.4 Automatic Parametrization of Degree 3 Curves and Surfaces . 37 7.4.1 Cubics . 38 7.4.2 Cubicoids . 40 7.5 Parameterizations of Real Cubic Surfaces . 42 7.5.1 Real and Rational Points on Cubic Surfaces . 44 7.5.2 Algebraic Reduction . 45 1 7.5.3 Parameterizations without Real Skew Lines . 49 7.5.4 Classification and Straight Lines from Parametric Equations . 52 7.5.5 Parameterization of general algebraic plane curves by A-splines . -

Diophantine Problems in Polynomial Theory
Diophantine Problems in Polynomial Theory by Paul David Lee B.Sc. Mathematics, The University of British Columbia, 2009 A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE in The College of Graduate Studies (Mathematics) THE UNIVERSITY OF BRITISH COLUMBIA (Okanagan) August 2011 c Paul David Lee 2011 Abstract Algebraic curves and surfaces are playing an increasing role in mod- ern mathematics. From the well known applications to cryptography, to computer vision and manufacturing, studying these curves is a prevalent problem that is appearing more often. With the advancement of computers, dramatic progress has been made in all branches of algebraic computation. In particular, computer algebra software has made it much easier to find rational or integral points on algebraic curves. Computers have also made it easier to obtain rational parametrizations of certain curves and surfaces. Each algebraic curve has an associated genus, essentially a classification, that determines its topological structure. Advancements on methods and theory on curves of genus 0, 1 and 2 have been made in recent years. Curves of genus 0 are the only algebraic curves that you can obtain a rational parametrization for. Curves of genus 1 (also known as elliptic curves) have the property that their rational points have a group structure and thus one can call upon the massive field of group theory to help with their study. Curves of higher genus (such as genus 2) do not have the background and theory that genus 0 and 1 do but recent advancements in theory have rapidly expanded advancements on the topic. -

Construction of Rational Surfaces of Degree 12 in Projective Fourspace
Construction of Rational Surfaces of Degree 12 in Projective Fourspace Hirotachi Abo Abstract The aim of this paper is to present two different constructions of smooth rational surfaces in projective fourspace with degree 12 and sectional genus 13. In particular, we establish the existences of five different families of smooth rational surfaces in projective fourspace with the prescribed invariants. 1 Introduction Hartshone conjectured that only finitely many components of the Hilbert scheme of surfaces in P4 contain smooth rational surfaces. In 1989, this conjecture was positively solved by Ellingsrud and Peskine [7]. The exact bound for the degree is, however, still open, and hence the question concerning the exact bound motivates us to find smooth rational surfaces in P4. The goal of this paper is to construct five different families of smooth rational surfaces in P4 with degree 12 and sectional genus 13. The rational surfaces in P4 were previously known up to degree 11. In this paper, we present two different constructions of smooth rational surfaces in P4 with the given invariants. Both the constructions are based on the technique of “Beilinson monad”. Let V be a finite-dimensional vector space over a field K and let W be its dual space. The basic idea behind a Beilinson monad is to represent a given coherent sheaf on P(W ) as a homology of a finite complex whose objects are direct sums of bundles of differentials. The differentials in the monad are given by homogeneous matrices over an exterior algebra E = V V . To construct a Beilinson monad for a given coherent sheaf, we typically take the following steps: Determine the type of the Beilinson monad, that is, determine each object, and then find differentials in the monad. -

A Brief Note on the Approach to the Conic Sections of a Right Circular Cone from Dynamic Geometry
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by EPrints Complutense A brief note on the approach to the conic sections of a right circular cone from dynamic geometry Eugenio Roanes–Lozano Abstract. Nowadays there are different powerful 3D dynamic geometry systems (DGS) such as GeoGebra 5, Calques 3D and Cabri Geometry 3D. An obvious application of this software that has been addressed by several authors is obtaining the conic sections of a right circular cone: the dynamic capabilities of 3D DGS allows to slowly vary the angle of the plane w.r.t. the axis of the cone, thus obtaining the different types of conics. In all the approaches we have found, a cone is firstly constructed and it is cut through variable planes. We propose to perform the construction the other way round: the plane is fixed (in fact it is a very convenient plane: z = 0) and the cone is the moving object. This way the conic is expressed as a function of x and y (instead of as a function of x, y and z). Moreover, if the 3D DGS has algebraic capabilities, it is possible to obtain the implicit equation of the conic. Mathematics Subject Classification (2010). Primary 68U99; Secondary 97G40; Tertiary 68U05. Keywords. Conics, Dynamic Geometry, 3D Geometry, Computer Algebra. 1. Introduction Nowadays there are different powerful 3D dynamic geometry systems (DGS) such as GeoGebra 5 [2], Calques 3D [7, 10] and Cabri Geometry 3D [11]. Focusing on the most widespread one (GeoGebra 5) and conics, there is a “conics” icon in the ToolBar. -

Chapter 9: Conics Section 9.1 Ellipses
Chapter 9: Conics Section 9.1 Ellipses ..................................................................................................... 579 Section 9.2 Hyperbolas ............................................................................................... 597 Section 9.3 Parabolas and Non-Linear Systems ......................................................... 617 Section 9.4 Conics in Polar Coordinates..................................................................... 630 In this chapter, we will explore a set of shapes defined by a common characteristic: they can all be formed by slicing a cone with a plane. These families of curves have a broad range of applications in physics and astronomy, from describing the shape of your car headlight reflectors to describing the orbits of planets and comets. Section 9.1 Ellipses The National Statuary Hall1 in Washington, D.C. is an oval-shaped room called a whispering chamber because the shape makes it possible for sound to reflect from the walls in a special way. Two people standing in specific places are able to hear each other whispering even though they are far apart. To determine where they should stand, we will need to better understand ellipses. An ellipse is a type of conic section, a shape resulting from intersecting a plane with a cone and looking at the curve where they intersect. They were discovered by the Greek mathematician Menaechmus over two millennia ago. The figure below2 shows two types of conic sections. When a plane is perpendicular to the axis of the cone, the shape of the intersection is a circle. A slightly titled plane creates an oval-shaped conic section called an ellipse. 1 Photo by Gary Palmer, Flickr, CC-BY, https://www.flickr.com/photos/gregpalmer/2157517950 2 Pbroks13 (https://commons.wikimedia.org/wiki/File:Conic_sections_with_plane.svg), “Conic sections with plane”, cropped to show only ellipse and circle by L Michaels, CC BY 3.0 This chapter is part of Precalculus: An Investigation of Functions © Lippman & Rasmussen 2020. -

Geometry of Algebraic Curves
Geometry of Algebraic Curves Fall 2011 Course taught by Joe Harris Notes by Atanas Atanasov One Oxford Street, Cambridge, MA 02138 E-mail address: [email protected] Contents Lecture 1. September 2, 2011 6 Lecture 2. September 7, 2011 10 2.1. Riemann surfaces associated to a polynomial 10 2.2. The degree of KX and Riemann-Hurwitz 13 2.3. Maps into projective space 15 2.4. An amusing fact 16 Lecture 3. September 9, 2011 17 3.1. Embedding Riemann surfaces in projective space 17 3.2. Geometric Riemann-Roch 17 3.3. Adjunction 18 Lecture 4. September 12, 2011 21 4.1. A change of viewpoint 21 4.2. The Brill-Noether problem 21 Lecture 5. September 16, 2011 25 5.1. Remark on a homework problem 25 5.2. Abel's Theorem 25 5.3. Examples and applications 27 Lecture 6. September 21, 2011 30 6.1. The canonical divisor on a smooth plane curve 30 6.2. More general divisors on smooth plane curves 31 6.3. The canonical divisor on a nodal plane curve 32 6.4. More general divisors on nodal plane curves 33 Lecture 7. September 23, 2011 35 7.1. More on divisors 35 7.2. Riemann-Roch, finally 36 7.3. Fun applications 37 7.4. Sheaf cohomology 37 Lecture 8. September 28, 2011 40 8.1. Examples of low genus 40 8.2. Hyperelliptic curves 40 8.3. Low genus examples 42 Lecture 9. September 30, 2011 44 9.1. Automorphisms of genus 0 an 1 curves 44 9.2. -
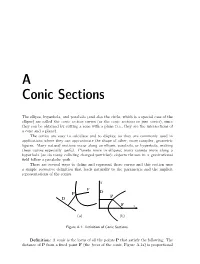
A Conic Sections
A Conic Sections The ellipse, hyperbola, and parabola (and also the circle, which is a special case of the ellipse) are called the conic section curves (or the conic sections or just conics), since they can be obtained by cutting a cone with a plane (i.e., they are the intersections of a cone and a plane). The conics are easy to calculate and to display, so they are commonly used in applications where they can approximate the shape of other, more complex, geometric figures. Many natural motions occur along an ellipse, parabola, or hyperbola, making these curves especially useful. Planets move in ellipses; many comets move along a hyperbola (as do many colliding charged particles); objects thrown in a gravitational field follow a parabolic path. There are several ways to define and represent these curves and this section uses asimplegeometric definition that leads naturally to the parametric and the implicit representations of the conics. y F P D P D F x (a) (b) Figure A.1: Definition of Conic Sections. Definition: A conic is the locus of all the points P that satisfy the following: The distance of P from a fixed point F (the focus of the conic, Figure A.1a) is proportional 364 A. Conic Sections to its distance from a fixed line D (the directrix). Using set notation, we can write Conic = {P|PF = ePD}, where e is the eccentricity of the conic. It is easy to classify conics by means of their eccentricity: =1, parabola, e = < 1, ellipse (the circle is the special case e = 0), > 1, hyperbola. -

Section 9.2 Hyperbolas 597
Section 9.2 Hyperbolas 597 Section 9.2 Hyperbolas In the last section, we learned that planets have approximately elliptical orbits around the sun. When an object like a comet is moving quickly, it is able to escape the gravitational pull of the sun and follows a path with the shape of a hyperbola. Hyperbolas are curves that can help us find the location of a ship, describe the shape of cooling towers, or calibrate seismological equipment. The hyperbola is another type of conic section created by intersecting a plane with a double cone, as shown below5. The word “hyperbola” derives from a Greek word meaning “excess.” The English word “hyperbole” means exaggeration. We can think of a hyperbola as an excessive or exaggerated ellipse, one turned inside out. We defined an ellipse as the set of all points where the sum of the distances from that point to two fixed points is a constant. A hyperbola is the set of all points where the absolute value of the difference of the distances from the point to two fixed points is a constant. 5 Pbroks13 (https://commons.wikimedia.org/wiki/File:Conic_sections_with_plane.svg), “Conic sections with plane”, cropped to show only a hyperbola by L Michaels, CC BY 3.0 598 Chapter 9 Hyperbola Definition A hyperbola is the set of all points Q (x, y) for which the absolute value of the difference of the distances to two fixed points F1(x1, y1) and F2 (x2, y2 ) called the foci (plural for focus) is a constant k: d(Q, F1 )− d(Q, F2 ) = k . -

Algebraic Plane Curves Deposited by the Faculty of Graduate Studies and Research
PLUCKER'3 : NUMBERS: ALGEBRAIC PLANE CURVES DEPOSITED BY THE FACULTY OF GRADUATE STUDIES AND RESEARCH Iw • \TS • \t£S ACC. NO UNACC.'»"1928 PLITCOR'S FOOTERS IE THE THEORY 0? ALGEBRAIC PLAITS CURVES A Thesis presented in partial fulfilment for the degree of -Master of Arts, Department of Mathematics. April 28, 1928. by ALICiD WI1LARD TURIIPP. Acknowledgment Any commendation which this thesis may merit, is in large measure due to Dr. C..T. Sullivan, Peter Re&path Professor of Pure Mathematics; and I take this opportunity to express my indebtedness to him. April 25, 1928. I IT D A :: IITTPODIICTIOI? SECTIOH I. • pp.l-S4 Algebraic Curve defined. Intersection of two curves. Singular points on curves. Conditions for multiple points. Conditions determining an n-ic. Maximum number of double points. Examples. SECTION II ...... pp.25-39 Class of curve. Tangerfcial equations. Polar reciprocation. Singularities on a curve and its reciprocal. Superlinear branches, with application to intersections of two curves at singular points. Examples. 3SCTI0IT III pp.40-52 Polar Curves. Intersections of Curve and Pirst Polar. Hessian.Intersections of Hessian and Curve. Examples. 3ECTI0TT IV . .................. pp.52-69 Pliicker's numbers and Equations for simple singularities. Deficiency. Unicursal Curves. Classification of cubies and quartics. Extension of Plucker's relations to k-ple points with distinct tangents, and to ordinary superlinear branch points. Short discussion of Higher Singularities. Examples. I PhTJCPEirS PTE.3EE3 IE PEE EHSOHY CF ALGEBRAIC Ph-TITE CUPYE3. IPPEODUCPIOH Pith the advent of the nineteenth century,a new era dawned in the progress of analytic geometry. The appearance of poiiceletTs, "Traite des proprietes project ives des figures", in 1822, really initiated modern geometry.