The ECMWF Ensemble Prediction System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Rise of Syriza: an Interview with Aristides Baltas
THE RISE OF SYRIZA: AN INTERVIEW WITH ARISTIDES BALTAS This interview with Aristides Baltas, the eminent Greek philosopher who was one of the founders of Syriza and is currently a coordinator of its policy planning committee, was conducted by Leo Panitch with the help of Michalis Spourdalakis in Athens on 29 May 2012, three weeks after Syriza came a close second in the first Greek election of 6 May, and just three days before the party’s platform was to be revealed for the second election of 17 June. Leo Panitch (LP): Can we begin with the question of what is distinctive about Syriza in terms of socialist strategy today? Aristides Baltas (AB): I think that independently of everything else, what’s happening in Greece does have a bearing on socialist strategy, which is not possible to discuss during the electoral campaign, but which will present issues that we’re going to face after the elections, no matter how the elections turn out. We haven’t had the opportunity to discuss this, because we are doing so many diverse things that we look like a chicken running around with its head cut off. But this is precisely why I first want to step back to 2008, when through an interesting procedure, Synaspismos, the main party in the Syriza coalition, formulated the main elements of the programme in a book of over 300 pages. The polls were showing that Syriza was growing in popularity (indeed we reached over 15 per cent in voting intentions that year), and there was a big pressure on us at that time, as we kept hearing: ‘you don’t have a programme; we don’t know who you are; we don’t know what you’re saying’. -

European Left Info Flyer
United for a left alternative in Europe United for a left alternative in Europe ”We refer to the values and traditions of socialism, com- munism and the labor move- ment, of feminism, the fem- inist movement and gender equality, of the environmental movement and sustainable development, of peace and international solidarity, of hu- man rights, humanism and an- tifascism, of progressive and liberal thinking, both national- ly and internationally”. Manifesto of the Party of the European Left, 2004 ABOUT THE PARTY OF THE EUROPEAN LEFT (EL) EXECUTIVE BOARD The Executive Board was elected at the 4th Congress of the Party of the European Left, which took place from 13 to 15 December 2013 in Madrid. The Executive Board consists of the President and the Vice-Presidents, the Treasurer and other Members elected by the Congress, on the basis of two persons of each member party, respecting the principle of gender balance. COUNCIL OF CHAIRPERSONS The Council of Chairpersons meets at least once a year. The members are the Presidents of all the member par- ties, the President of the EL and the Vice-Presidents. The Council of Chairpersons has, with regard to the Execu- tive Board, rights of initiative and objection on important political issues. The Council of Chairpersons adopts res- olutions and recommendations which are transmitted to the Executive Board, and it also decides on applications for EL membership. NETWORKS n Balkan Network n Trade Unionists n Culture Network Network WORKING GROUPS n Central and Eastern Europe n Africa n Youth n Agriculture n Migration n Latin America n Middle East n North America n Peace n Communication n Queer n Education n Public Services n Environment n Women Trafficking Member and Observer Parties The Party of the European Left (EL) is a political party at the Eu- ropean level that was formed in 2004. -

Germany's Left Party Is Shut out of Government, but Remains a Powerful
Germany’s Left Party is shut out of government, but remains a powerful player in German politics blogs.lse.ac.uk/europpblog/2013/09/19/germanys-left-party-is-shut-out-of-government-but-remains-a-powerful- player-in-german-politics/ 19/09/2013 The Left Party (Die Linke) received 11.9 per cent of the vote in the 2009 German federal elections, and is predicted to comfortably clear the country’s 5 per cent threshold in this Sunday’s vote. Jonathan Olsen outlines the party’s recent history and its role in the German party system. He notes that although the Left Party appears willing to enter into coalition with the other major parties, it is not viewed as a viable coalition partner. Despite being shut out of government, the party nevertheless remains an important part of German politics. Although the government that emerges after Germany’s federal elections on 22 September will largely depend on the performance of the two biggest parties, the conservative block of CDU/CSU and the Left-Center Social Democrats (SPD), the impact of smaller parties on the ultimate outcome should not be underestimated. Thus the failure of the Free Democrats (FDP) to clear the 5 per cent hurdle necessary for legislative representation would most likely lead to a “Grand Coalition” of CDU/CSU and SPD, while an outstanding performance by the German Greens could make possible (though unlikely) an SPD-Greens coalition government. The third of Germany’s smaller parties – the Left Party – will not have the same impact on coalition calculations as the FDP and Greens, since all of the other four parties have categorically ruled out a coalition with it. -

Dimensions and Alignments in European Union Politics: Cognitive Constraints and Partisan Responses
Working Paper Series in European Studies Volume 1, Number 3 Dimensions and Alignments in European Union Politics: Cognitive Constraints and Partisan Responses DR. SIMON HIX DEPARTMENT OF GOVERNMENT LONDON SCHOOL OF ECONOMICS AND POLITICAL SCIENCE Houghton Street London, WC2A 2AE United Kingdom ([email protected]) EDITORIAL ADVISORY COMMITTEE: GILLES BOUSQUET KEITH COHEN COLLEEN DUNLAVY ANDREAS KAZAMIAS LEON LINDBERG ELAINE MARKS ANNE MINER ROBERT OSTERGREN MARK POLLACK GREGORY SHAFFER MARC SILBERMAN JONATHAN ZEITLIN Copyright © 1998 All rights reserved. No part of this paper may be reproduced in any form without permission of the author. European Studies Program, International Institute, University of Wisconsin--Madison Madison, Wisconsin http://polyglot.lss.wisc.edu/eur/ 1 Dimensions and Alignments in European Union Politics: Cognitive Constraints and Partisan Responses Simon Hix Department of Government, London School of Economics and Political Science, London, United Kingdom Abstract As the European Union (EU) has evolved, the study agenda has shifted from ‘European integration’ to ‘EU politics’. Missing from this new agenda, however, is an understanding of the ‘cognitive constraints’ on actors, and how actors respond: i.e. the shape of the EU ‘political space’ and the location of social groups and competition between actors within this space. The article develops a theoretical framework for understanding the shape of the EU political space (the interaction between an Integration-Independence and a Left-Right dimension and the location of class and sectoral groups within this map), and tests this framework on the policy positions of the Socialist, Christian Democrat and Liberal party leaders between 1976 and 1994 (using the techniques of the ECPR Party Manifestos Group Project). -
ESS9 Appendix A3 Political Parties Ed
APPENDIX A3 POLITICAL PARTIES, ESS9 - 2018 ed. 3.0 Austria 2 Belgium 4 Bulgaria 7 Croatia 8 Cyprus 10 Czechia 12 Denmark 14 Estonia 15 Finland 17 France 19 Germany 20 Hungary 21 Iceland 23 Ireland 25 Italy 26 Latvia 28 Lithuania 31 Montenegro 34 Netherlands 36 Norway 38 Poland 40 Portugal 44 Serbia 47 Slovakia 52 Slovenia 53 Spain 54 Sweden 57 Switzerland 58 United Kingdom 61 Version Notes, ESS9 Appendix A3 POLITICAL PARTIES ESS9 edition 3.0 (published 10.12.20): Changes from previous edition: Additional countries: Denmark, Iceland. ESS9 edition 2.0 (published 15.06.20): Changes from previous edition: Additional countries: Croatia, Latvia, Lithuania, Montenegro, Portugal, Slovakia, Spain, Sweden. Austria 1. Political parties Language used in data file: German Year of last election: 2017 Official party names, English 1. Sozialdemokratische Partei Österreichs (SPÖ) - Social Democratic Party of Austria - 26.9 % names/translation, and size in last 2. Österreichische Volkspartei (ÖVP) - Austrian People's Party - 31.5 % election: 3. Freiheitliche Partei Österreichs (FPÖ) - Freedom Party of Austria - 26.0 % 4. Liste Peter Pilz (PILZ) - PILZ - 4.4 % 5. Die Grünen – Die Grüne Alternative (Grüne) - The Greens – The Green Alternative - 3.8 % 6. Kommunistische Partei Österreichs (KPÖ) - Communist Party of Austria - 0.8 % 7. NEOS – Das Neue Österreich und Liberales Forum (NEOS) - NEOS – The New Austria and Liberal Forum - 5.3 % 8. G!LT - Verein zur Förderung der Offenen Demokratie (GILT) - My Vote Counts! - 1.0 % Description of political parties listed 1. The Social Democratic Party (Sozialdemokratische Partei Österreichs, or SPÖ) is a social above democratic/center-left political party that was founded in 1888 as the Social Democratic Worker's Party (Sozialdemokratische Arbeiterpartei, or SDAP), when Victor Adler managed to unite the various opposing factions. -

The Making of SYRIZA
Encyclopedia of Anti-Revisionism On-Line Panos Petrou The making of SYRIZA Published: June 11, 2012. http://socialistworker.org/print/2012/06/11/the-making-of-syriza Transcription, Editing and Markup: Sam Richards and Paul Saba Copyright: This work is in the Public Domain under the Creative Commons Common Deed. You can freely copy, distribute and display this work; as well as make derivative and commercial works. Please credit the Encyclopedia of Anti-Revisionism On-Line as your source, include the url to this work, and note any of the transcribers, editors & proofreaders above. June 11, 2012 -- Socialist Worker (USA) -- Greece's Coalition of the Radical Left, SYRIZA, has a chance of winning parliamentary elections in Greece on June 17, which would give it an opportunity to form a government of the left that would reject the drastic austerity measures imposed on Greece as a condition of the European Union's bailout of the country's financial elite. SYRIZA rose from small-party status to a second-place finish in elections on May 6, 2012, finishing ahead of the PASOK party, which has ruled Greece for most of the past four decades, and close behind the main conservative party New Democracy. When none of the three top finishers were able to form a government with a majority in parliament, a date for a new election was set -- and SYRIZA has been neck-and-neck with New Democracy ever since. Where did SYRIZA, an alliance of numerous left-wing organisations and unaffiliated individuals, come from? Panos Petrou, a leading member of Internationalist Workers Left (DEA, by its initials in Greek), a revolutionary socialist organisation that co-founded SYRIZA in 2004, explains how the coalition rose to the prominence it has today. -

The Sensitive Left and the Impervious Right: Multilevel Models and the Politics of Inequality, Ideology, and Legitimacy in Europe
Luxembourg Income Study Working Paper Series Working Paper No. 477 The Sensitive Left and the Impervious Right: Multilevel Models and the Politics of Inequality, Ideology, and Legitimacy in Europe Christopher J. Anderson and Matthew M. Singer April 2008 Luxembourg Income Study (LIS), asbl The Sensitive Left and the Impervious Right: Multilevel Models and the Politics of Inequality, Ideology, and Legitimacy in Europe Christopher J. Anderson Department of Government Cornell University Ithaca, NY 14853 [email protected] Matthew M. Singer Department of Political Science University of Connecticut Storrs, CT 06269-1024 [email protected] Abstract: While comparative politics has been dominated by macro-approaches, relatively little comparative scholarship has focused on understanding the behavior of individuals. However, recent years have seen increased attention to integrating what we know about individual citizens with what we know about macro-level contexts that vary across countries. This research examines how people’s interpretations, opinions, and actions are shaped by and embedded in variable contextual parameters (structural, institutional, cultural). This article discusses the growing literature on the nexus of macro-level context and individual behavior and the potential for integrating existing knowledge, as well as some of the challenges inherent in multilevel analyses. It also provides a novel substantive application. Using surveys conducted in 2002-03 in 20 European democracies, we examine the effect of income inequality on people’s attitudes about the functioning of the political system and trust in public institutions. We find that citizens in countries with higher levels of income inequality express more negative attitudes toward public institutions. -

A Close Correspondence
jointly open their 2016-2017 seasons with A Close Correspondence featuring the music of Leoš Janáček David Lang Onur Türkmen Mark Winges based on the letters of Leoš Janáček and Kamila Stösslová Sullivan Ballou Johann Wolfgang von Goethe and Charlotte von Stein Abelard and Héloïse Virginia Woolf First Presbyterian Church, Berkeley October 15, 2016 San Francisco Conservatory of Music, Caroline Hume Concert Hall October 24, 2016 Singing without a net Greetings and Welcome! Volti and Left Coast Chamber Ensemble, two of the most innovative forces in the Bay Area new music scene, are joining forces to launch the 2016-2017 season together. It is a natural alliance for instrumentalists and singers who have been admiring each other’s work across the Bay for many years. Since our collaboration on Kurt Rohde and Thomas Laqueur’s opera Death with Interruptions, our two organizations have been talking about doing another project together. The result is tonight’s concert, a program that coalesced around music based on letters, intimate letters from across several centuries in which correspondents revealed their tender, fearful, spiritual, and joyful innermost thoughts. Working together has been a great pleasure. We hope you will enjoy the works, new and old, as much as we do. As we are at the beginning of the season, this is a great time to subscribe to both Volti and Left Coast. Subscribing is one of the best ways to support music-making like you hear tonight, and you have the opportunity at this show to apply the price of tonight’s ticket to a season subscription to either or both of our groups. -

Newsletter International Department
NEWSLETTER International 03/2014 (2nd september 2014) Saxony: 6th State Elections on 31. 8.2014 Overview Results Voter turnout: The new state parliament of Saxony was elected by Contents: less then half of the constituency. Voter turnout reached a historical low for state elections in Saxony with 49.2 per cent but was as high as turnout for European Parliament elections earlier this year. On n 6th State Elections in election night numerous times the holidays were mentioned (Sunday Saxony … p. 1 was the last day of summer holidays in Saxony) as a reason for this. This argument can not convince: If results had been open, if there n International Community had been a thematic profilation during the campaign, or an actual to Speak and Act Concer fight for power – then voter turnout would have been clearly higher. tedly … p. 3 De facto, the results were foreseeable. n Summer-Interview ARD Gregor Gysi … p. 3 n Economic Warriors on Escalation Path … p. 3 n New Chance for Testimony of Edward Snowden in Ger many … p. 3 n Immediate Ceasefire. Pro tection of Civilians… p. 3 Gregor Gysi, chairman of the left fraction DIE LINKE at the Bundestag, during the election campaign in Saxoni. 79 per cent of the pollees – more then ever before at state elections in Saxony - assessed the economic situation as good (2009: 38 per cent; 2004: 26 per cent; 1999: 40 per cent, Infratest dimap). 75 per cent considered the economic situation in Saxony as better then in any other Land (Forschungsgruppe Wahlen). There was no issue top- ping all other election issues and, as already mentioned, no alternati- ve to a further five years of CDU government and Minister-President Tillich. -
Challenger Party List
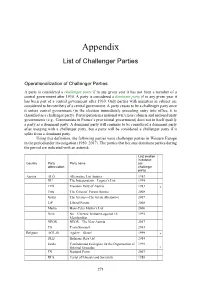
Appendix List of Challenger Parties Operationalization of Challenger Parties A party is considered a challenger party if in any given year it has not been a member of a central government after 1930. A party is considered a dominant party if in any given year it has been part of a central government after 1930. Only parties with ministers in cabinet are considered to be members of a central government. A party ceases to be a challenger party once it enters central government (in the election immediately preceding entry into office, it is classified as a challenger party). Participation in a national war/crisis cabinets and national unity governments (e.g., Communists in France’s provisional government) does not in itself qualify a party as a dominant party. A dominant party will continue to be considered a dominant party after merging with a challenger party, but a party will be considered a challenger party if it splits from a dominant party. Using this definition, the following parties were challenger parties in Western Europe in the period under investigation (1950–2017). The parties that became dominant parties during the period are indicated with an asterisk. Last election in dataset Country Party Party name (as abbreviation challenger party) Austria ALÖ Alternative List Austria 1983 DU The Independents—Lugner’s List 1999 FPÖ Freedom Party of Austria 1983 * Fritz The Citizens’ Forum Austria 2008 Grüne The Greens—The Green Alternative 2017 LiF Liberal Forum 2008 Martin Hans-Peter Martin’s List 2006 Nein No—Citizens’ Initiative against -

GERMAN GREENS in COALITION GOVERNMENTS a Political Analysis
GERMAN GREENS IN COALITION GOVERNMENTS A Political Analysis by Arne Jungjohann 1 GERMAN GREENS IN COALITION GOVERNMENTS A Political Analysis A Political Analysis A Political German Greens in Coalition Governments German Greens in Coalition Governments A Political Analysis By Arne Jungjohann Published by the Heinrich-Böll-Stiftung European Union English version published with the support of the Green European Foundation About the author CONTENTS Arne Jungjohann is an energy analyst and political scientist. He advises foundations, think tanks, and civil society in communication and strategy building for climate and energy policy. Previously, he worked for Minister President Winfried Kretschmann of Baden-Württemberg, the Heinrich Böll Foundation in Washington DC, in the German Bundestag, and in the family owned business. As its editor he launched the most influential English Twitter account on the German Energiewende (@ EnergiewendeGER). He co-authored ‘Energy Democracy: Germany’s Energiewende to Renewables’ Foreword 7 (Palgrave Macmillan 2016). Arne is a member of the Green Academy, a network with leading thinkers Foreword by the author 9 from science, politics and civil society which is facilitated by the Heinrich-Böll-Stiftung. He is the founder of the local chapter of the German Green Party in Washington DC and lives in Stuttgart. He studied at Philipps University Marburg and at the Free University of Berlin. 1 Introduction 11 1.1 State of the research and sources used 12 1.2 Lead Questions and Composition of the Study 14 2 Coalition Constellations 15 3 The Coalition Arena at State Level 19 3.1 Departmental Responsibilities of the Greens 19 3.2 Coalition Management in the G-states 26 3.2.1 The Bundesrat Clause 27 3.2.2 Coalition Personnel 28 3.2.3 Coalition Committees 30 You are free to share – copy and redistribute the material in any medium or format and adapt – remix, transform, and build upon the material. -
![The Green Party of Germany: Bündnis 90 / Die Grünen [PDF]](https://docslib.b-cdn.net/cover/6046/the-green-party-of-germany-b%C3%BCndnis-90-die-gr%C3%BCnen-pdf-1076046.webp)
The Green Party of Germany: Bündnis 90 / Die Grünen [PDF]
THE GREEN PARTY OF GERMANY BÜNDNIS 90 / DIE GRÜNEN 1. Historical Context and democratic structure of Germany The political structures that existed before a united German state emerged were dominated by relatively small political entities, which enjoyed varying degrees of political autonomy. The Bundesrepublik Deutschland (Federal Republic of Germany) is formally only 70 years old. Unsurprisingly, this history of federalism is represented in the Bundesrepublik as well. Today we have 16 federal states. This decentralization is one of the most important parts of our democracy. Berlin, as the capital, was and is the best symbol of Germany’s colourful past. West Berlin’s location deep within the territory of Eastern Germany made it an island of the Bundesrepublik (Western Germany). West Berlin has had a very special phase after WWII that was deeply intertwined with the Cold War. With the end of the Cold War, the two German states the German Democratic Republic or GDR (East Germany) and Bundesrepublik finally became a united state again. Today, Berlin with its 3.6 million inhabitants, is Germany’s biggest city, its capital and the place to be for culture, arts, lifestyle, politics and science. Germany’s democratic system is a federal parliamentary republic with two chambers: the Bundestag (Germany’s parliament) and the Bundesrat (the representative body of the federal states). Germany’s political system is essentially a multi-party system, which includes a 5% threshold (parties representing recognised national minorities, for example Danes, Frisians, Sorbs and Romani people are exempt from the 5% threshold, but normally only run in state elections).