Developing a Stochastic Optimization Model for Operating the Manitoba Hydro Multi-Reservoir Hydroelectric Power System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Keeyask Generation Project Environmental Effects Summary Document
Keeyask Generation Project Environmental Effects Summary Document November 2012 Prepared for: Canadian Environmental Assessment Agency CEAR 11-03-64144 Table of Contents INTRODUCTION PART A - KEEYASK GENERATION PROJECT ENVIRONMENTAL IMPACT STATEMENT EXECUTIVE SUMMARY PART B - KEEYASK TRANSMISSION PROJECT ENVIRONMENTAL ASSESSMENT REPORT EXECUTIVE SUMMARY Introduction The Canadian Environmental Assessment Agency (the Agency) invites the public to comment on the potential environmental effects of the Keeyask Generation Project and the proposed measures to prevent or mitigate those effects as described in this document. Keeyask Hydropower Limited Partnership proposes the construction, operation and decommissioning of the Project, a 695 megawatt hydroelectric generating station to be located at Gull Rapids on the lower Nelson River, approximately 180 kilometres northeast of Thompson, Manitoba. The Keeyask Generation Project includes a powerhouse complex, spillway, dams, dykes, reservoir and supporting infrastructure (the Project). The federal environmental assessment also considers a proposal by Manitoba Hydro for a 22 kilometre transmission line to provide construction power to the Keeyask Generation Project and three 35 kilometre long transmission lines within a single corridor to transmit electricity from the Keeyask Generation Project to the existing Radisson Converter Station near Gillam, Manitoba as part of the Project. This document is based on the Environmental Impact Statement for the Keeyask Generation Project submitted by the Keeyask Hydropower Limited Partnership in July 2012 and the Environmental Assessment Report submitted by Manitoba Hydro in November 2012. The environmental impact analyses are presented in two parts within this document. Part A includes the Executive Summary of the Keeyask Generation Project Environmental Impact Statement. Part B includes Executive Summary of the Keeyask Transmission Project Environmental Assessment Report. -

Lake Sturgeon (Acipenser Fulvescens) in Canada
Information in Support of the 2017 COSEWIC Assessment and Status Report on the Lake Sturgeon (Acipenser fulvescens) in Canada Cameron C. Barth, Duncan Burnett, Craig A. McDougall, and Patrick A. Nelson North/South Consultants Inc. 83 Scurfield Boulevard Winnipeg, Manitoba R3Y 1G4 2018 Canadian Manuscript Report of Fisheries and Aquatic Sciences 3166 Canadian Manuscript Report of Fisheries and Aquatic Sciences Manuscript reports contain scientific and technical information that contributes to existing knowledge but which deals with national or regional problems. Distribution is restricted to institutions or individuals located in particular regions of Canada. However, no restriction is placed on subject matter, and the series reflects the broad interests and policies of Fisheries and Oceans Canada, namely, fisheries and aquatic sciences. Manuscript reports may be cited as full publications. The correct citation appears above the abstract of each report. Each report is abstracted in the data base Aquatic Sciences and Fisheries Abstracts. Manuscript reports are produced regionally but are numbered nationally. Requests for individual reports will be filled by the issuing establishment listed on the front cover and title page. Numbers 1-900 in this series were issued as Manuscript Reports (Biological Series) of the Biological Board of Canada, and subsequent to 1937 when the name of the Board was changed by Act of Parliament, as Manuscript Reports (Biological Series) of the Fisheries Research Board of Canada. Numbers 1426 - 1550 were issued as Department of Fisheries and Environment, Fisheries and Marine Service Manuscript Reports. The current series name was changed with report number 1551. Rapport manuscrit canadien des sciences halieutiques et aquatiques Les rapports manuscrits contiennent des renseignements scientifiques et techniques qui constituent une contribution aux connaissances actuelles, mais qui traitent de problèmes nationaux ou régionaux. -
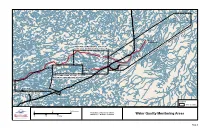
Water Quality Monitoring Areas 0 10 20 Miles Filelocation: G:\EIS\Keeyask\Publish Mxds\AEMP\AEMP WQ Monitoringareas 20120920.Mxd
Port Nelson Weir River Deer Gillam Island Island ER IV R N O S L E N Weir River Goose C re e k ÚÕ Potential Conawapa G.S. L Swift imestone Riv er KEEYASK GENERATING STATION Creek TO KETTLE GENERATING STATION PR 280 ÚÕ STEPHENS ¾À Limestone DOWNSTREAM OF KETTLE GENERATING STATION G.S. Angling Lake Kettle G.S. ÚÕ LAKE ÚÕ Longspruce ÚÕ G.S. Proposed Clark Gull Lake Keeyask G.S. Lake CLARK LAKE OUTLET TO Assean Lake KEEYASK GENERATING STATION SPLIT LAKE Aiken River Kelsey G.S. ÚÕ SPLIT LAKE AREA Fox River Legend Area Boundary NELSON RIVER 0 25 50 KilometresOkaw Creek Projection: UTM Zone 15, NAD 83 Data Source: NTS base 1:500 000 Water Quality Monitoring Areas 0 10 20 Miles FileLocation: G:\EIS\Keeyask\Publish_MXDs\AEMP\AEMP_WQ_MonitoringAreas_20120920.mxd Map 4 KEEYASK GENERATION PROJECT DRAFT - October 2012 capture the extent of effects. Sampling locations along the gradient should represent different exposure levels (e.g., within the mixing zone vs. fully mixed river condition). The hybrid design allows for statistical testing for effects in the area immediately downstream of construction activities and also provides an estimate of the spatial extent of effects. Effects will be evaluated through statistical comparisons of key parameters between reference and exposure locations during each sampling event and to pre-Project baseline data. Water quality data will also be compared to MWQSOGs and CCME guidelines for the protection of aquatic life (PAL), Health Canada guidelines for drinking water, and any regulatory requirements specified in environmental approvals for the Project. As previously noted, water quality data collected under CAMP at locations in the region will be considered to provide context for observed changes. -

Movement and Habitat Use of Juvenile Lake Sturgeon (Acipenser Fulvescens , Rafinesque, 1817) in a Large Hydroelectric Reservoir (Nelson River, Canada)
Received: 2 October 2016 | Accepted: 15 January 2017 DOI: 10.1111/jai.13378 ORIGINAL ARTICLE Movement and habitat use of juvenile Lake Sturgeon (Acipenser fulvescens , Rafinesque, 1817) in a large hydroelectric reservoir (Nelson River, Canada) C. L. Hrenchuk | C. A. McDougall | P. A. Nelson | C. C. Barth North/South Consultants Inc. , Winnipeg , MB , Canada Summary Movement and habitat utilization of juvenile Lake Sturgeon (Acipenser fulvescens) were Correspondence Claire L. Hrenchuk, North/South Consultants examined in Stephens Lake, a large hydroelectric reservoir on the Nelson River, Inc., Winnipeg, MB, Canada. Manitoba, Canada, between 21 June 2011, and 15 October 2012. Stephens Lake is Email: [email protected] defined by a sharp hydraulic gradient at the upstream end (Gull Rapids) and a pro- Funding information nounced reservoir transition zone (RTZ ), characterized by a change in substrate com- Keeyask Hydropower Limited Partnership ; Manitoba Hydro’ s Lake Sturgeon Stewardship position from coarse to fine. Twenty juvenile Lake Sturgeon <600 mm fork length and Enhancement Program were captured in the RTZ , implanted with acoustic transmitters, and tracked using stationary receivers. Our primary hypothesis considered that, if foraging behaviour was contingent on sand substrate, these fish would spend the majority of the open- water season foraging in the relatively small area where hydraulic gradients dictate sand deposition. Data indicated that tracked individuals were highly bottom oriented, and utilized deeper thalweg habitats exclusively during the first open-water season. On average, juveniles spent only 22% of their open-water time in the RTZ (river kilo- meter [rkm] 4.5–7.0). Most fish spent more time upstream as opposed to downstream, but a few individuals did utilize backwatered thalweg areas, suggesting that silt-overlay habitats may be suitable for foraging. -
Ice Mitigation Measures Used During the Construction of the Keeyask Generating Station After the Failure of the Ice Boom
CGU HS Committee on River Ice Processes and the Environment 19th Workshop on the Hydraulics of Ice Covered Rivers Whitehorse, Yukon, Canada, July 9-12, 2017. Ice Mitigation Measures Used During the Construction of the Keeyask Generating Station after the Failure of the Ice Boom Michael Morris, P.Eng , Jarrod Malenchak, P.Eng. Manitoba Hydro, 360 Portage Ave, Winnipeg, MB R3C 0G8 [email protected]; [email protected] An ice boom was installed upstream of Gull Rapids on the Nelson River in northern Manitoba to minimize the volume of ice that could be transported and deposited at the Keeyask Generating Station construction site. With lower expected ice volumes associated with the ice boom, the expected water level staging at the construction site was significantly reduced, allowing for the construction of lower cofferdam crests. After the ice boom failed, water levels began to rise, resulting in the imminent danger of the cofferdams overtopping and a significant risk of damages and costly schedule delays. This paper describes the mitigation measures that were used to reduce the risk of overtopping the cofferdams. The mitigation measures employed can be classified as structural (cofferdam top-up, groin extensions), operational (lowering of water level in downstream reservoir) and on-ice measures (cutting upstream border ice to form an ice bridge). 1. Introduction Manitoba Hydro and four Cree Nations known collectively as the partner First Nations: Tataskweyak Cree Nation and War Lake First Nation (working together as the Cree Nation Partners); Fox Lake Cree Nation and York Factory First Nation have formed the Keeyask Hydropower Limited Partnership (KHLP) to design, construct and operate the Keeyask Generating Station. -

Submission from Tataskweyak Cree Nation to Manitoba Clean Environment Commission Public Hearing on the Bipole III Transmission P
TATASKWEYAK CREE NATION Submission by Tataskweyak Cree Nation (TCN) to the Manitoba Clean Environment Commission Public Hearing on the Bipole III Transmission Project OUTLINE September 17, 2012 I. Outline of Topics and Issues to be Addressed A. TCN’s Expression of the Cree World View and Hydro Development Issues • TCN’s Mother Earth Model and the Interrelatedness of all Things; • Assessment of Stresses on the TCN Homeland Ecosystem Caused by Hydro Development using TCN’s Mother Earth Model; and • Achieving Harmony and Balance in the TCN Homeland Ecosystem. B. The History and Extent of Hydro Development in the TCN Resource Area Issues • Lands and waters affected or occupied in the TCN Resource Area for Hydro Development; and • Attendant Impacts. C. The Disturbance within the TCN Resource Area Caused by the Bipole III Transmission Project Issues • The Nature and Extent of the Bipole III Transmission Project in the Split Lake Resource Area; and • Attendant Impacts. D. Negotiations with Manitoba Hydro to Address Attendant Impacts of the Bipole III Transmission Project on TCN Issues • Overview of Bilateral TCN - Hydro Process to Address Attendant Impacts of Bipole III; 1 | Page o Relationship of the TCN – Hydro Process to the Crown’s Duties Arising Under s. 35 of the Constitution Act (1982) o Relationship of the TCN – Hydro Process to Past Agreements Made between TCN and Hydro, particularly the: − 1977 Northern Flood Agreement [NFA] and; − 1992 Agreement as presented by legal counsel in a memo to be prepared and submitted seven (7) days in advance of the TCN submission • The Current Status of the TCN – Hydro Process; and • TCN Conditions for Support of the Bipole III Transmission Project. -
Aquatic Environment Supporting Volume
Keeyask Generation Project Environmental Impact Statement Supporting Volume Aquatic Environment June 2012 KEEYASK GENERATION PROJECT ENVIRONMENTAL IMPACT STATEMENT AQUATIC ENVIRONMENT SUPPORTING VOLUME Prepared by Keeyask Hydropower Limited Partnership Winnipeg, Manitoba June 2012 Canadian Environmental Assessment Registry Reference Number: 11-03-64144 KEEYASK GENERATION PROJECT June 2012 ACKNOWLEDGEMENTS Management and coordination of the Aquatic Environment Supporting Volume (AE SV): Manitoba Hydro North/South Consultants Inc. (NSC) Nick Barnes, B.Sc., M.Sc. Stuart Davies, B.Sc. Stephanie Backhouse, B.Sc., M.Sc. Friederike Schneider-Vieira, B.Sc., Ph.D. Marilynn Kullman, B.Sc., M.Sc. Don MacDonell, B.Sc., M.N.R.M., C.C.E.P. Richard Remnant, B.Sc., M.N.R.M. Lead authors and individuals responsible for the preparation of the AE SV: NSC Cam Barth B.Sc., M.Sc., Ph.D. Wolfgang Jansen, B.Sc., M.Sc., Ph.D. Ron Bretecher N.R.M.T. (Hon.) Jarod Larter, B.Sc. Megan Cooley, B.Sc., M.Sc. Jaymie MacDonald, B.Sc. Paul Cooley, B.Sc., M.Sc., Ph.D. Pat Nelson, B.Sc., Ph.D. Kathleen Dawson, B.Sc., M.Sc. Leanne Zrum, B.Sc., M.Sc. Jodi Holm, B.Sc., M.Sc. Additional individuals who contributed to the AE SV, either through field or office work: NSC James Aiken, B.Sc., M.Sc. Kristine Juliano, B.A., M.N.R.M. Ken Ambrose, N.R.M.T. Cheryl Klassen, B.Sc., M.Sc., Ph.D. Mark Blanchard Erin Koga, B.Sc. Lisa Capar, B.Sc., M.Sc. Mary Lang Regan Caskey, N.R.M.T. Christian Lavergne, N.R.M.T., B.Sc., M.Sc. -

Flow Alteration Impacts on Hudson Bay River Discharge
Received: 1 February 2018 Accepted: 13 September 2018 DOI: 10.1002/hyp.13285 SPECIAL ISSUE CANADIAN GEOPHYSICAL UNION 2018 Flow alteration impacts on Hudson Bay river discharge Stephen J. Déry1,2 | Tricia A. Stadnyk1,2 | Matthew K. MacDonald1,2 | Kristina A. Koenig3 | Catherine Guay4 1 Environmental Science and Engineering Program, University of Northern British Abstract Columbia, Prince George, British Columbia, This study explores flow regulation controls on daily river discharge variations and Canada trends into Hudson Bay from four highly regulated and 17 moderately regulated/ 2 Department of Civil Engineering, University of Manitoba, Winnipeg, Manitoba, Canada unregulated systems over 1960–2016. These 21 rivers contribute ~70% of the total 3 Hydrological Sciences Division, Manitoba annual riverine freshwater export to Hudson Bay, with highly regulated and moder- Hydro, Winnipeg, Manitoba, Canada ately regulated/unregulated rivers accounting for 47% and 53% of the discharge, 4 Hydro‐Québec, Institut de Recherche d'Hydro‐Québec, Varennes, Québec, Canada respectively. Daily observed streamflow data from the Water Survey of Canada, Correspondence Manitoba Hydro, Ontario Power Generation, and Hydro‐Québec are used. Decadal Stephen Déry, Environmental Science and hydrographs of the mean and coefficient of variation of daily river discharge are Engineering Program, University of Northern British Columbia, Prince George, British developed to assess the changing hydrological regimes in both systems. Decadal spec- Columbia V2N 4Z9, Canada. tral analyses reveal the dominant controls on daily river discharge input to Hudson Email: [email protected] Funding information Bay from the regulated and unregulated systems. Apart from expected peaks in Natural Sciences and Engineering Research spectral power on annual timescales arising from the nival regimes in both systems, Council of Canada; Manitoba Hydro, Grant/ Award Number: Baysys project a strong secondary peak emerges at weekly timescales from flow regulation due to hydropower production. -

Water Level & Flow Update for the Lower Nelson River
Water Level & Flow Update for the Lower Nelson River Weekly Update # 3 January 24, 2020 Lower Nelson River (Split Lake to Hudson Bay) Water up and impoundment has not started at Keeyask (planned to begin early February). Flows on the Nelson River are high as heavy Fall rainfall in the southern parts of the watershed flows north on its way to Hudson Bay - this will continue all winter. Hydro system flows to Split Lake and the Lower Nelson River come from 2 sources – Lake Winnipeg (LW) outflows through Kelsey generating station (at 3090 cms or 109,100 cfs) and Churchill River Diversion (CRD), through Notigi control structure (960 cms or 33,900 cfs)- see map. These combined flows (of 4,050 cms or 143,000 cfs) have been relatively constant since early December. The Nelson’s flow downstream of Keeyask is 4,125 cms ( or 145,700 cfs) (measured at Limestone GS). As of January 22, Lower Nelson River lake and forebay Changing ice conditions at Split Lake's outflow through levels are: Clark Lake can cause water levels to fluctuate quickly on Jenpeg • Split Lake 168.49 m (or 552.8 ft) Split Lake as either ice forms and backs up water in the • Clark Lake 168.09 m (or 551.5 ft ) lake, or melts and releases more water downstream. • Gull Lake 156.16 m (or 512.3 ft ) Since early December water levels on these lakes have • Stephens Lake 139.87 m (or 458.9 ft) fluctuated due to ice conditions by almost 2.0 feet, while • Long Spruce forebay 110.03 m (or 361.0 ft ) hydro system operations have remained relatively constant. -
Northern Range Expansion and Invasion by the Common Carp, Cyprinus Carpio, of the Churchill River System in Manitoba
14_05022_carp.qxd 6/5/07 7:30 PM Page 83 Northern Range Expansion and Invasion by the Common Carp, Cyprinus carpio, of the Churchill River System in Manitoba PASCAL H. J. BADIOU1 and L. GORDON GOLDSBOROUGH1,2 1 Department of Botany, University of Manitoba, Winnipeg, Manitoba R3T 2N2 Canada; e-mail: [email protected]; Present address: 48 DesMeurons Street, Winnipeg, Manitoba, R2H 2M1 Canada 2 Delta Marsh Field Station, University of Manitoba, Winnipeg, Manitoba R3T 2N2 Canada Badiou, Pascal H.J., and L. Gordon Goldsborough. 2006. Northern range expansion and invasion by the Common Carp, Cyprinus carpio, of the Churchill River system in Manitoba. Canadian Field-Naturalist 120(1): 83–86. Recent fisheries data from northern Manitoba indicates that the Common Carp (Cyprinus carpio) has extended the northern limit of its range. Additionally, it also appears that carp have invaded and established viable populations in the Manitoba portion of the Churchill River. Habitat degradation and altered flow regimes as result of hydroelectric development in north- ern Manitoba may have facilitated the expansion of carp in the region. Key Words: Common Carp, Cyprinus carpio, exotic species, range expansion, invasion, habitat disturbance, Manitoba. The Common Carp (Cyprinus carpio) was intro- phytes and creating an ecological feedback mechanism duced intentionally to Manitoba, Canada, when fish that perpetuates the turbid state (Scheffer 1998). Carp from Minnesota were stocked in the Assiniboine River physically disturb the sediment-water interface and the watershed southeast of Brandon in 1886 (Stewart and algae associated with sediment. These algae play a Watkinson 2004). These early attempts at introduc- major role in the stabilization of the bottom sediments tion failed, and carp only became established after pop- (Taylor et al. -
Split Lake Cree First Nation
SPLIT LAKE CREE FIRST NATION Analysis of Change Split Lake Cree Post Project Environmental Review VOLUME ONE: August 1996 Traditional fishing using hand-woven nets and birch bark canoes. his document is one of a Tseries of studies being used in the planning of hydroelectric development on the Birthday/Gull reach of the Nelson River. It forms part of the Post Project Environmental Review as described in Article 2.8.3(b) of the 1992 Split Lake Cree nfa Implementation Agreement. Manitoba Hydro provided the funding and technical equipment required for the development of this study, as part of its responsibilities under the 1992 Agreement. By mutual agreement, Split Lake Cree First Nation has taken lead responsibility for the production of the paper, with periodic review and comment by Manitoba Hydro representatives. the study is largely based on interviews conducted in the Cree language with Split Lake Cree Elders and adults, in which testimony was provided about many important developments in the life of the people. Video tapes of these interviews are Dedicated to the memory of available at the Tataskweyak Trust Elder Samuel Garson, Secretariat Office in Split Lake. Split Lake Cree. Contents of this report may be reproduced without permission, provided appropriate credits are given. notice to reader The views and interpretations in this report are exclusively those of the Split Lake Cree. While Manitoba Hydro funded this report and contributed photographs and maps, the Corporation does not necessarily agree with, nor is it bound by all of -
Keeyask Generation Project 2015
Keeyask Generation Project Aquatic Effects Monitoring Plan Fish Community Monitoring Report AEMP-2016-09 Manitoba Conservation and Water Stewardship Client File 5550.00 Manitoba Environment Act Licence No. 3107 2015 - 2016 KEEYASK GENERATION PROJECT AQUATIC EFFECTS MONITORING REPORT Report #AEMP–2016–09 FISH COMMUNITY MONITORING IN THE NELSON RIVER FROM SPLIT LAKE TO STEPHENS LAKE, SUMMER 2015 Prepared for Manitoba Hydro By S.C. Lavergne, R.A. Remnant, and C.L. Hrenchuk June 2016 KEEYASK GENERATION PROJECT June 2016 This report should be referenced as: Lavergne, S.C., R.A. Remnant, and C.L. Hrenchuk. 2016. Fish community monitoring in the Nelson River from Split Lake to Stephens Lake, summer 2015. Keeyask Generation Project Aquatic Effects Monitoring Report #AEMP-2016-09. A report prepared for Manitoba Hydro by North/South Consultants Inc., June 2016. AQUATIC EFFECTS MONITORING PLAN II FISH COMMUNITY MONITORING KEEYASK GENERATION PROJECT June 2016 SUMMARY Background The Keeyask Hydropower Limited Partnership (KHLP) was required to prepare a plan to monitor the effects of construction and operation of the Keeyask Generating Station (GS) on the environment. Besides measuring the accuracy of the predictions made and actual effects of the GS on the environment, monitoring results will provide information on how construction and operation of the GS will affect the environment and if more needs to be done to reduce harmful effects. Construction of the Keeyask GS began in mid-July 2014. During August and September, the flow in the north and central channels of Gull Rapids was blocked off and all the flow was diverted to the south channel.