CSI-Based Gesture Recognition and Object Detection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

VAASAN AMMATTIKORKEAKOULU UNIVERSITY of APPLIED SCIENCES Information Technology
Mengdi Wu INTELLIGENT LINUX-BASED ACCESS POINT Technology and Communication 2014 FOREWORD This is my graduation thesis in the Degree Programme in Information Technol- ogy, VAMK, University of Applied Sciences. I would like to express my gratitude to my supervisor, Dr. Chao Gao. He gave me the inspiration for my thesis. No work without efforts. During my entire thesis working time, he gave me a lot of useful guidance with patience and kindness. Also he taught me how to deal and solve the problems alone. This is a life time lesson for me. Moreover, during my undergraduate study time, as a Principal Lec- turer of Telecommunications, his serious attitude for academic is setting a good model for me. Last I would like to thank my family. Without their support, I could not have fin- ished my studies this easy. However, I would also thank my friends Lv Chunqiu, Song Shuo for their help with my thesis. Hope they all will have a bright future. Wu Mengdi Vaasa, Finland 28/04/2014 VAASAN AMMATTIKORKEAKOULU UNIVERSITY OF APPLIED SCIENCES Information Technology ABSTRACT Author Mengdi Wu Title Intelligent Linux-Based Access Point Year 2014 Language English Pages 33+ 2 Appendices Name of Supervisor Chao Gao Nowadays IEEE802.11-base WLAN (Wireless LAN also known as Wi-Fi) has been used everywhere. It is free to setup a Wi-Fi network for everybody, but sometime there can be more than 10 Wi-Fi networks in one area. For most of the networks, they work on “default” IEEE802.11 channels which are channel 1, 6 and 11. -
Wlan Performance Analysis for Indoor Environments
WLAN PERFORMANCE ANALYSIS FOR INDOOR ENVIRONMENTS Bachelor Thesis Supervisor: Prof. Dr.-Ing. Markus Rupp Assistants: Dipl.-Ing. Philipp Svoboda M.Sc. Çise Mıdoğlu SCIENCE AND TELECOMMUNICATION TECHNOLOGIES ENGINEERING By BARTOLOME OLIVER ARBONA Wien, July 2015 Abstract Studies report that in the next years there will be a high increase in the number of mobile devices, the overall data traffic generated by mobile devices, and a migration from larger cells towards Wireless Local Area Networks (WLAN) and smaller cells (picocells and femtocells). There is also a large amount of data that is estimated to be offloaded to Wi-Fi and small cells. Due to this estimated growth in the mobile data traffic over wireless environment; several companies are investing and focusing resources in improving their services mainly related with WLAN’s. The concerns of the industry are focused on examining the performance of WLAN’s, especially indoors, and finding ways to understand more about actual User Experience (UX) in real scenarios. These ambitions require the combination of theory with practice. This thesis is mainly focused on supporting these performance estimations. Trying to help on this purpose, a Graphical User Interface (GUI) is developed for simulating and analysing certain metrics of WLAN´s in indoor environments, such as coverage and data rate. The tool not only combines several different advanced concepts relating to indoor propagation, penetration loss, layout modelling, interference modelling, and different WLAN standards; but presents them in a simple and easy-to-understand interface to the final user. The performance metrics are represented quantitatively and as accurately as possible. When the tool is run with appropriate input values, it is able to provide results such as the Signal Strength, Signal to Noise Ratio (SNR), Signal to Interference Ratio (SIR) and maximum achievable Data Rate; this allows the service providers to estimate the maximum performance of their own systems and also to validate theoretical results by simulation. -

Advanced Office WLAN: a Case Study
Karl Österlund Advanced office WLAN: a case study Metropolia University of Applied Sciences Bachelor of Engineering Information Technology Bachelor’s Thesis 2 November 2018 Abstract Author Karl Österlund Title Advanced office WLAN: a case study Number of Pages 32 pages Date 2 November 2018 Degree Bachelor of Engineering Degree Programme Information and Communications Technology Professional Major Communication Networks Instructors Jukka Louhelainen, Senior Lecturer The purpose of this thesis was to go deeper into WLAN design. First, the theory behind WLAN design is discussed. Second, how to put the theory into practice in a customer case where high-performance WLAN was needed is analyzed. A portable access point and Ekahau Site Survey was used to survey the site to get as ac- curate data as possible for the design. The site survey was done before the design showed how the access points would perform in this building. The results of the survey were of great help to make the design as accurate as possible before implementing it. Finally, this study shows the importance of robust WLAN designing. Keywords WLAN, Ekahau, Site Survey, WLAN design Tiivistelmä Tekijä Karl Österlund Otsikko Advanced office WLAN: a case study Sivumäärä 32 sivua Aika 2.11.2018 Tutkinto insinööri (AMK) Tutkinto-ohjelma Tietotekniikka Ammatillinen pääaine Tietoverkot ja tietoliikenne Ohjaajat Lehtori Jukka Louhelainen Tämän opinnäytetyön tarkoituksena oli syventyä WLAN-suunnitteluun. Ensimmäisenä käy- dään läpi teoriaa WLANin suunnittelusta ja myöhemmin sitä, miten ne toteutetaan asiak- kaan tapauksessa, jossa tarvitaan suorituskykyistä WLAN-verkkoa. Siirrettävää WLAN-tukiasemaa ja Ekahau Site Survey -ohjelmaa käytettiin ensin selvittä- mään, miten verkossa käyttöön tulevat tukiasemat suoriutuisivat tässä rakennuksessa. -

6.3 Wireless Traffic Capture and Analysis 219
i “Davidhoff” — 2012/5/17 — 19:59 — page 219 — #21 i i i 6.3 Wireless Traffic Capture and Analysis 219 • History of client signal strength (can help identify geographic location) • Routing tables • Stored packets before they are forwarded • Packet counts and statistics • ARP table (MAC address to IP address mappings) • DHCP lease assignments • Access control lists • I/O memory • Running configuration • Processor memory • Flow data and related statistics 6.2.3.2 Persistent Again, like wired routers and switches, WAPs are not designed to include much local persis- tent storage space. The WAP operating system and startup configuration files are maintained in persistent storage by necessity. Persistent evidence you may find on a WAP includes: • Operating system image • Boot loader • Startup configuration files 6.2.3.3 Off-System Wireless access points can be configured to send event logs to remote systems for off-site ag- gregation and storage. Syslog and SNMP are commonly supported. Enterprise-class devices may include other options, often proprietary. Check the documentation for the model you are investigating and review local configuration to locate devices that may contain off-system WAP logs. 6.3 Wireless Traffic Capture and Analysis Capturing and analyzing wireless traffic often provides valuable evidence in an investiga- tion, for the same reasons we discussed in Chapter 3. However, there are some additional complexities involved in capturing wireless traffic, as opposed to sniffing traffic on the wire. In this section, we review some important notes for capturing and analyzing wireless traffic. For further discussion of passive evidence acquisition and analysis, please see Chapter 3, “Evidence Acquisition.” i i i i i “Davidhoff” — 2012/5/17 — 19:59 — page 220 — #22 i i i 220 Chapter 6 Wireless: Network Forensics Unplugged 6.3.1 Spectrum Analysis There are, literally, an infinite number of frequencies over which data can be transmitted through the air. -

PHY – 802.11B Engineering WCOM, WLAN, 23
School of 3.1. Introduction to WLAN IEEE 802.11 Engineering WCOM, WLAN, 1 References [1] J. Schiller, „Mobile Communications“, 2nd Ed., Pearson, 2003. [2] Martin Sauter, "From GSM to LTE", chapter 6, Wiley, 2011. [3] wiki to WLAN: http://de.wikipedia.org/wiki/IEEE_802.11 [4] wiki, https://de.wikipedia.org/wiki/IEEE_802.11a [5] List of WLAN channels: http://en.wikipedia.org/wiki/List_of_WLAN_channels [6] 802.11 OFDM Overview: http://rfmw.em.keysight.com/wireless/helpfiles/89600B/WebHelp/subsystems/wlan-ofdm/Content/ofdm_80211-overview.htm School of Wireless LAN IEEE 802.11 Engineering WCOM, WLAN, 2 http://www.keysight.com/main/application.jspx?nid=-34915.0.00&cc=CH&lc=ger https://www.neratec.com/de/wlan-produkte/uebersicht ODIN-W1 from uBlox CC3200 from Texas Instruments Host-based multiradio module series SimpleLink™ Wi-Fi® and Internet- with Wi-Fi 802.11a/b/g/n of-Things-Solution, a Single-Chip Wireless MCU (and Bluetooth v4.0 Dual Mode) e.g. integrated into a coffee machine School of Introduction Engineering WCOM, WLAN, 3 IEEE standard 802.11 is the most famous WLAN standard belongs to the 802.x LAN standards specifies PHY and MAC layer adapted to special requirements of wireless LANs standardization is ongoing, some examples 802.11b: 1999, 2.4 GHz, 22 MHz, 11 Mbps 802.11a: 1999, 5 GHz, 20 MHz, 54 Mbps, OFDM 802.11g: 2003, 2.4 GHz, 20 MHz, 54 Mbps, OFDM 802.11n: 2009, 2.4/5 GHz, 20/40 MHz, 600 Mbps, OFDM, MIMO 802.11ac: 2013, 5 GHz, 80/160 MHz, >1 Gbps, OFDM, MIMO 802.11ad: 2016, 60 GHz, 1760 MHz, <7 Gbps, OFDM, MIMO 802.11ah: 2016, 868/900 MHz, 1-16 MHz, >0.65 Mbps, longer distance, IoT 802.11p: vehicle2vehicle and vehicle2roadside School of System Architecture Engineering [2], chapter 6.3.1 WCOM, WLAN, 4 1 AP and some STAs in the same radio coverage form a BSS. -

List of WLAN Channels
List of WLAN channels From Wikipedia, the free encyclopedia The List of WLAN channels is the legally allowed IEEE 802.11 or more commonly Wi-Fi Wireless LAN channels. The 802.11 workgroup currently documents use in three distinct frequency ranges, 2.4 GHz, 3.6 GHz and 4.9/5.0 GHz bands.[1] Each range is divided into multitude of channels. Countries apply their own regulations to both the allowable channels, allowed users and maximum power levels within these frequency ranges. In some countries, such as the United States, licensed Amateur Radio operators may use some of the channels at much higher power for long distance wireless access. Contents [hide] 1 2.4 GHz (802.11b/g/n) 2 3.6 GHz (802.11y) 3 5 GHz (802.11a/h/j/n) 4 See also 5 References [edit] 2.4 GHz (802.11b/g/n) SARL M/M/D/S HYPERCABLE 81 Rue des Carrières ZA de la Ronze 69440 TALUYERS tel : +33 4 78 48 74 75 – www.hypercable.fr SARL M/M/D/S HYPERCABLE 81 Rue des Carrières ZA de la Ronze 69440 TALUYERS tel : +33 4 78 48 74 75 – www.hypercable.fr Graphical representation of Wi-Fi channels in 2.4 GHz band There are 14 channels designated in the 2.4 GHz range spaced 5 MHz apart (with the exception of a 12 MHz spacing before Channel 14). As the protocol requires 25 MHz of channel separation, adjacent channels overlap and will interfere with each other. Consequently, using only channels 1, 6, 11, and 14 is recommended to avoid interference.[2] Potential Wireless LAN uses of this range are documented by IEEE 802.11 clauses 18 (802.11b), 19 (802.11g) and 20 (802.11n). -
Short Range Radio Device Communications
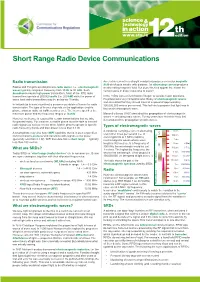
Short Range Radio Device Communications Short Range Radio Device CommunicationsIonising radiation and health hazards Ionising radiation and health hazards Radio transmission An electric current in a straight conductor produces a circular magnetic The majority of Irish homes get Internet access via wireless routers.1 fi eld which gets weaker with distance. An alternating current produces Communication between a wireless router and any smart connected Radios and TVs pick up and process radio waves, i.e., electromagnetic an alternating magnetic fi eld. But does this fi eld appear the instant the device is bidirectional. Both devices contain a transmitter and a receiver waves typically ranging in frequency from 30 Hz to 30 GHz. Such current starts or does it take time to travel? and so can ‘talk’ to one another. The communication is complex and the broadcasts require high power transmitters. Most of the RTE radio data rate is very high (e.g. 600 Mbps). Each device can detect errors In the 1850s James Clerk Maxwell began to consider such questions. transmittersWhat operate is atradiation? 200,000 watts (i.e. 200 kW) while the power of Main kinds of ionising λ (m) E (eV) inMain the received sources packets of ofionising data and ‘request’radiation that be sent again. At the some local radio transmitters may be as low as 10 watts. He produced a very comprehensive theory of electromagnetic waves same time the router may be communicating with several other local and calculatedradiation that they should travel at a speed of approximately1 pm 1.24 GeV The pie-chart below shows the average contribution from different sources A candle radiates light and heat in all directions and can devicesof ionising and radiation with remote to the averagecomputers Irish via person. -

Alaris Capture Pro Software
COMPUTER NETWORKS C-138 Self Learning Material Directorate of Distance Education SWAMI VIVEKANAND SUBHARTI UNIVERSITY MEERUT-250005 UTTAR PRADESH SIM Module Developed by ; Ramesh Bangia has been writing computer books for the one decade. He has written books on various topics of computers, mainiy, related to the software. He has to his credit books pertaining to school levels, both middle and secondary level; books for Department of Electronics' O Level papers; books for various polytechnics; books for gerieral software usage. Prior to this he edited a software magazine called Software Today. Reviewed by the Study Material Assessment Committee Comprising: 1. Dr. V.B. Sahal, Vice Chancellor 2. Dr. G.S. Bhatnagar, Pro-Vice Chancellor 3. Dr. Mohan Gupta 4. Mr. Sumit Bhatnagar 5. Mr. Rohit Kumar Copyright © Laxmi Publications Pvt Ltd No part of this publication which is material protected by this copyright notice may be reproduced or transmitted or utilized or stored in any form or by any means now known or hereinafter invented, electronic, digital or mechanical, including photocopying, scanning, recording or by any information storage or retrieval system, without prior permission from the publisher. Information contained in this book has been published by Laxmi Publications Pvt Ltd and has been obtained by its authors from sources believed to be reliable and are correct to the best of their knowledge. However, the publisher and its author shall in no event be liable for any errors, omissions or damages arising out of use of this information and specially disclaim and implied warranties or merchantability or fitness for any particular use. -

Vysoké Učení Technické V Brně Evaluation of the Wi-Fi
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV BIOMEDICÍNSKÉHO INŽENÝRSTVÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF BIOMEDICAL ENGINEERING HOCHSCHULE FURTWANGEN UNIVERSITY, GERMANY B.BRAUN MELSUNGEN AG, GERMANY EVALUATION OF THE WI-FI TECHNIQUE FOR USE IN A NAVIGATED ORTHOPEDIC SURGERY DIPLOMOVÁ PRÁCE MASTER´S THESIS AUTOR PRÁCE Bc. JINDŘICH TRUHLÁŘ AUTHOR VEDOUCÍ PRÁCE prof. Ing. IVO PROVAZNÍK, Ph.D. SUPERVISOR Dipl. Inf. CHRISTIAN WEHRLE (BBraun) prof. Dr. rer. nat EDGAR JÄGER (HFU) BRNO 2012 BRNO UNIVERSITY OF TECHNOLOGY Faculty of Electrical Engineering and Communication Department of Biomedical Engineering Diploma thesis Master's study field Biomedical Engineering and Bioinformatics Student: Bc. Jindřich Truhlář ID: 106103 Year of study: 2 Academic year: 2011/12 TITLE OF THESIS: Evaluation of the Wi-Fi technique for use in a navigated orthopedic surgery INSTRUCTION: 1) Carry out a research about the available wireless technologies and restrictions related to use in medical environment. Research should include problems of acceptance of WLAN in OR in different countries, medical accreditation, suggestion of service concept, etc. 2) Explore possible ways of wireless connection of devices used in OrthoPilot navigation system (navigation camera, wireless remote control, ultrasound, tablet/smartphone, second monitor, KIS). Test different hardware/software solutions for wireless image streaming and based on analysis choose the optimal one. 3) Perform configuration and tests with access point. 4)According to the chosen approach, build up a working system with several devices. 5) Discuss the behaviour and reliability of such system and suggest further possible development. REFERENCE: [1] MACKAY, S.;WRIGHT, E.;REYNDERS, D.;PARK, J.: Practical Industrial Data Networks: Design, Instalation and troubleshooting, Newnes, Oxford, 2004. -

List of WLAN Channels - Wikipedia
List of WLAN channels - Wikipedia https://en.wikipedia.org/wiki/List_of_WLAN_channels List of WLAN channels Wireless local area network channels using IEEE 802.11 protocols are sold mostly under the trademark WiFi. The 802.11 workgroup has documented use in five distinct frequency ranges: 2.4 GHz, 3.6 GHz, 4.9 GHz, 5 GHz, and 5.9 GHz bands.[1] Each range is divided into a multitude of channels. Countries apply their own regulations to the allowable channels, allowed users and maximum power levels within these frequency ranges. Contents 2.4 GHz (802.11b/g/n) Most countries United States Interference concerns 3.65 GHz (802.11y) 4.9 GHz (802.11j) public safety WLAN 5 GHz (802.11a/h/j/n/ac/ax) 5.9 GHz (802.11p) 60 GHz (802.11ad/ay) 900 MHz (802.11ah) See also References Further reading 2.4 GHz (802.11b/g/n) Graphical representation of 2.4 GHz band channels overlapping Most countries Graphical representation of Wireless LAN channels in 2.4 GHz band. Note "channel 3" in the 40MHz diagram above is often labelled with the 20MHz channel numbers "1+5" or "1" with "+ Upper" or "5" with "+ Lower" in router interfaces, and "11" as "9+13" or "9" with "+ Upper" or "13" with "+ Lower" United States Graphical representation of Wireless LAN channels in 2.4 GHz band. Note "channel 3" in the 40 MHz diagram above is often labelled with the 20MHz channel numbers "1+5" or "1" with "+ Upper" or "5" with "+ Lower" in router interfaces. Fourteen channels are designated in the 2.4 GHz range, spaced 5 MHz apart from each other except for a 12 MHz space before channel 14.[2] For 802.11g/n, it is not possible to guarantee orthogonal frequency-division multiplexing (OFDM) operation, thus affecting the number of possible non-overlapping channels depending on radio operation.[3] Interference concerns As the protocol requires 16.25 to 22 MHz of channel separation (as shown above), adjacent channels overlap and will interfere with each other. -

Medical Connectivity Faqs
The Medical Connectivity FAQs Advancing Safety in Health Technology About AAMI AAMI is a is a diverse community of more than 9,000 professionals united by one important mission—the development, management, and use of safe and effective health technology. AAMI is the primary source of consensus standards, both national and international, for the medical device industry, as well as practical information, support, and guidance for healthcare technology and sterilization professionals. Published by AAMI 901 N. Glebe Road, Suite 300 Arlington, VA 22203 www.aami.org © 2020 by the Association for the Advancement of Medical Instrumentation All Rights Reserved Publication, reproduction, photocopying, storage, or transmission, electronically or otherwise, of all or any part of this document without the prior written permission of the Association for the Advancement of Medical Instrumentation is strictly prohibited by law. It is illegal under federal law (17 U.S.C. § 101, et seq.) to make copies of all or any part of this document (whether internally or externally) without the prior written permission of the Association for the Advancement of Medical Instrumentation. Violators risk legal action, including civil and criminal penalties, and damages of $100,000 per offense. For permission regarding the use of all or any part of this document, complete the reprint request form at www.aami.org or contact AAMI at 901 N. Glebe Road, Suite 300, Arlington, VA 22203. Phone: +1-703-525-4890; Fax: +1-703-525-1067. Printed in the United States of America The Medical Connectivity FAQs Table of Contents Introduction .............................................2 General Questions ........................................3 Radio/Network Choices, Options, and Coexistence..............8 Prepurchase/Preinstallation .............................. -
ECE 4740 Partial Lecture Notes
ECE 4880 Fall 2016 Chapter 11 Present Wireless Network Designs Edwin C. Kan School of Electrical and Computer Engineering Cornell University Goals • From the present standards of wireless network to apply the RF design principles: – Short-range WLAN: Wi-Fi, Bluetooth, etc. – Long-range, reliable-service cellular networks: 3G, 4G, 5G. – Broadcasting based network: AM/FM/HAM radio, TV, etc. – Radar systems: Ground, air and multi-static radars, RFID, etc. • How system requirements set the component requirements Wi-Fi: Brief History 1985: FCC deregulated 2.4-2.5 GHz for unlicensed ISM (industrial, scientific and medical) communities. 1997: Original standard and implementation by CSIRO (Australia) . Original name: IEEE 802.11b Direct Sequence. Then becomes: “Wireless Fidelity” or Wi-Fi. Maximum data rate : 2 Mbps (original) to 54 Mbps . Interference Mitigation: Direct sequence and frequency hopping . Collision sense media access with collision avoidance(CSMA/CA) . Forward Error Correction . Compatibility with current Ethernet networks (PHY and MAC) 1999: 802.11b (2.4GHz), 802.11a (5.0 GHz) 2003: 802.11g Justin Berg, “The IEEE 802.11 Standardization – Its History, Specifications, Implementations, and Future” Technical Report GMU-TCOM-TR-8 Wi-Fi System Level Specifications IEEE Specification 802.11 g 802.11 b 802.11 a 5 GHz FCC 2.4 GHz 2.4 GHz (5.15-5.35, 5.725- Frequency Band (2.412-2.484 GHz) (2.412-2.484 GHz) 5.825 GHz) Interference OFDM DSSS OFDM Mitigation BPSK 6, 9 CCK 11, 5.5 BPSK 6, 9 Data Rate QPSK 12, 18 QPSK 2 QPSK 12, 18 (Mbps) 16 QAM 24, 36 BPSK 1 16 QAM 24, 36 64 QAM 48, 54 64 QAM 48, 54 Wi-Fi Air Interface Example (5G) TDD: Time-Division Duplex IEEE 802.11a Air Interface “RF Electronics”, Behzad Razavi Wi-Fi Channel Division 802.11b: • Channel spacing: 22 MHz 802.11g/a: • Channel Spacing: 20 MHz • Occupied BW: 16.25 MHz • OFDM Subcarriers: 52 • OFDM carrier spacing: 0.3125 MHz Channel 1 - 11 are used in US Wikipedia 2015, List of WLAN Channels, USA.