Userland Tools and Techniques for Board Bring up and Systems Integration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Flexible Lustre Management
Flexible Lustre management Making less work for Admins ORNL is managed by UT-Battelle for the US Department of Energy How do we know Lustre condition today • Polling proc / sysfs files – The knocking on the door model – Parse stats, rpc info, etc for performance deviations. • Constant collection of debug logs – Heavy parsing for common problems. • The death of a node – Have to examine kdumps and /or lustre dump Origins of a new approach • Requirements for Linux kernel integration. – No more proc usage – Migration to sysfs and debugfs – Used to configure your file system. – Started in lustre 2.9 and still on going. • Two ways to configure your file system. – On MGS server run lctl conf_param … • Directly accessed proc seq_files. – On MSG server run lctl set_param –P • Originally used an upcall to lctl for configuration • Introduced in Lustre 2.4 but was broken until lustre 2.12 (LU-7004) – Configuring file system works transparently before and after sysfs migration. Changes introduced with sysfs / debugfs migration • sysfs has a one item per file rule. • Complex proc files moved to debugfs • Moving to debugfs introduced permission problems – Only debugging files should be their. – Both debugfs and procfs have scaling issues. • Moving to sysfs introduced the ability to send uevents – Item of most interest from LUG 2018 Linux Lustre client talk. – Both lctl conf_param and lctl set_param –P use this approach • lctl conf_param can set sysfs attributes without uevents. See class_modify_config() – We get life cycle events for free – udev is now involved. What do we get by using udev ? • Under the hood – uevents are collect by systemd and then processed by udev rules – /etc/udev/rules.d/99-lustre.rules – SUBSYSTEM=="lustre", ACTION=="change", ENV{PARAM}=="?*", RUN+="/usr/sbin/lctl set_param '$env{PARAM}=$env{SETTING}’” • You can create your own udev rule – http://reactivated.net/writing_udev_rules.html – /lib/udev/rules.d/* for examples – Add udev_log="debug” to /etc/udev.conf if you have problems • Using systemd for long task. -
ECE 598 – Advanced Operating Systems Lecture 19
ECE 598 { Advanced Operating Systems Lecture 19 Vince Weaver http://web.eece.maine.edu/~vweaver [email protected] 7 April 2016 Announcements • Homework #7 was due • Homework #8 will be posted 1 Why use FAT over ext2? • FAT simpler, easy to code • FAT supported on all major OSes • ext2 faster, more robust filename and permissions 2 btrfs • B-tree fs (similar to a binary tree, but with pages full of leaves) • overwrite filesystem (overwite on modify) vs CoW • Copy on write. When write to a file, old data not overwritten. Since old data not over-written, crash recovery better Eventually old data garbage collected • Data in extents 3 • Copy-on-write • Forest of trees: { sub-volumes { extent-allocation { checksum tree { chunk device { reloc • On-line defragmentation • On-line volume growth 4 • Built-in RAID • Transparent compression • Snapshots • Checksums on data and meta-data • De-duplication • Cloning { can make an exact snapshot of file, copy-on- write different than link, different inodles but same blocks 5 Embedded • Designed to be small, simple, read-only? • romfs { 32 byte header (magic, size, checksum,name) { Repeating files (pointer to next [0 if none]), info, size, checksum, file name, file data • cramfs 6 ZFS Advanced OS from Sun/Oracle. Similar in idea to btrfs indirect still, not extent based? 7 ReFS Resilient FS, Microsoft's answer to brtfs and zfs 8 Networked File Systems • Allow a centralized file server to export a filesystem to multiple clients. • Provide file level access, not just raw blocks (NBD) • Clustered filesystems also exist, where multiple servers work in conjunction. -
![[13주차] Sysfs and Procfs](https://docslib.b-cdn.net/cover/8218/13-sysfs-and-procfs-338218.webp)
[13주차] Sysfs and Procfs
1 7 Computer Core Practice1: Operating System Week13. sysfs and procfs Jhuyeong Jhin and Injung Hwang Embedded Software Lab. Embedded Software Lab. 2 sysfs 7 • A pseudo file system provided by the Linux kernel. • sysfs exports information about various kernel subsystems, HW devices, and associated device drivers to user space through virtual files. • The mount point of sysfs is usually /sys. • sysfs abstrains devices or kernel subsystems as a kobject. Embedded Software Lab. 3 How to create a file in /sys 7 1. Create and add kobject to the sysfs 2. Declare a variable and struct kobj_attribute – When you declare the kobj_attribute, you should implement the functions “show” and “store” for reading and writing from/to the variable. – One variable is one attribute 3. Create a directory in the sysfs – The directory have attributes as files • When the creation of the directory is completed, the directory and files(attributes) appear in /sys. • Reference: ${KERNEL_SRC_DIR}/include/linux/sysfs.h ${KERNEL_SRC_DIR}/fs/sysfs/* • Example : ${KERNEL_SRC_DIR}/kernel/ksysfs.c Embedded Software Lab. 4 procfs 7 • A special filesystem in Unix-like operating systems. • procfs presents information about processes and other system information in a hierarchical file-like structure. • Typically, it is mapped to a mount point named /proc at boot time. • procfs acts as an interface to internal data structures in the kernel. The process IDs of all processes in the system • Kernel provides a set of functions which are designed to make the operations for the file in /proc : “seq_file interface”. – We will create a file in procfs and print some data from data structure by using this interface. -
Singularityce User Guide Release 3.8
SingularityCE User Guide Release 3.8 SingularityCE Project Contributors Aug 16, 2021 CONTENTS 1 Getting Started & Background Information3 1.1 Introduction to SingularityCE......................................3 1.2 Quick Start................................................5 1.3 Security in SingularityCE........................................ 15 2 Building Containers 19 2.1 Build a Container............................................. 19 2.2 Definition Files.............................................. 24 2.3 Build Environment............................................ 35 2.4 Support for Docker and OCI....................................... 39 2.5 Fakeroot feature............................................. 79 3 Signing & Encryption 83 3.1 Signing and Verifying Containers.................................... 83 3.2 Key commands.............................................. 88 3.3 Encrypted Containers.......................................... 90 4 Sharing & Online Services 95 4.1 Remote Endpoints............................................ 95 4.2 Cloud Library.............................................. 103 5 Advanced Usage 109 5.1 Bind Paths and Mounts.......................................... 109 5.2 Persistent Overlays............................................ 115 5.3 Running Services............................................. 118 5.4 Environment and Metadata........................................ 129 5.5 OCI Runtime Support.......................................... 140 5.6 Plugins................................................. -

Ubuntu Server Guide Basic Installation Preparing to Install
Ubuntu Server Guide Welcome to the Ubuntu Server Guide! This site includes information on using Ubuntu Server for the latest LTS release, Ubuntu 20.04 LTS (Focal Fossa). For an offline version as well as versions for previous releases see below. Improving the Documentation If you find any errors or have suggestions for improvements to pages, please use the link at thebottomof each topic titled: “Help improve this document in the forum.” This link will take you to the Server Discourse forum for the specific page you are viewing. There you can share your comments or let us know aboutbugs with any page. PDFs and Previous Releases Below are links to the previous Ubuntu Server release server guides as well as an offline copy of the current version of this site: Ubuntu 20.04 LTS (Focal Fossa): PDF Ubuntu 18.04 LTS (Bionic Beaver): Web and PDF Ubuntu 16.04 LTS (Xenial Xerus): Web and PDF Support There are a couple of different ways that the Ubuntu Server edition is supported: commercial support and community support. The main commercial support (and development funding) is available from Canonical, Ltd. They supply reasonably- priced support contracts on a per desktop or per-server basis. For more information see the Ubuntu Advantage page. Community support is also provided by dedicated individuals and companies that wish to make Ubuntu the best distribution possible. Support is provided through multiple mailing lists, IRC channels, forums, blogs, wikis, etc. The large amount of information available can be overwhelming, but a good search engine query can usually provide an answer to your questions. -
How to Avoid Writing Kernel Drivers
How to avoid writing kernel drivers Chris Simmonds Embedded Linux Conference Europe 2018 How to avoid writing kernel drivers1 Copyright © 2011-2018, 2net Ltd License These slides are available under a Creative Commons Attribution-ShareAlike 3.0 license. You can read the full text of the license here http://creativecommons.org/licenses/by-sa/3.0/legalcode You are free to • copy, distribute, display, and perform the work • make derivative works • make commercial use of the work Under the following conditions • Attribution: you must give the original author credit • Share Alike: if you alter, transform, or build upon this work, you may distribute the resulting work only under a license identical to this one (i.e. include this page exactly as it is) • For any reuse or distribution, you must make clear to others the license terms of this work How to avoid writing kernel drivers2 Copyright © 2011-2018, 2net Ltd About Chris Simmonds • Consultant and trainer • Author of Mastering Embedded Linux Programming • Working with embedded Linux since 1999 • Android since 2009 • Speaker at many conferences and workshops "Looking after the Inner Penguin" blog at http://2net.co.uk/ @2net_software https://uk.linkedin.com/in/chrisdsimmonds/ How to avoid writing kernel drivers3 Copyright © 2011-2018, 2net Ltd Agenda • Device drivers in kernel space • Device drivers in user space • Some examples: • GPIO • PWM • I2C How to avoid writing kernel drivers4 Copyright © 2011-2018, 2net Ltd Conventional device driver model Application User space C library System call handler Linux Generic services kernel Device drivers interrupts Hardware How to avoid writing kernel drivers5 Copyright © 2011-2018, 2net Ltd How applications interact device drivers • In Linux, everything is a file 1 • Applications interact with drivers via POSIX functions open(2), read(2), write(2), ioctl(2), etc • Two main types of interface: 1. -

Get to Grips with /Proc and /Sysfs
/proc and /sysfs /proc and /sysfs Get to grips with /proc and /sysfs Did you think that ‘everything is a file’ was ancient Unix gibberish? Think again: Juliet Kemp delves into the virtual files that keep your box going. he /proc directory (short for process working in kernel space at all), and for pootling around with to filesystem), is fundamentally a myth: it doesn’t satisfy your own interest in what’s going on under the hood of really exist anywhere at all. Instead, it’s a your system. T virtual filesystem, generated at boot and In older Unices (such as BSD and Solaris), /proc is strictly updated thereafter through interacting with the kernel. process-related, but in Linux it’s extended to non-process It doesn’t use any disk space (because it doesn’t really data as well, making it even more useful. This also means that exist!), and it uses only a small amount of memory. in some cases you can use it to make changes as well as to When you ask to read a read data. This is discussed file, information is retrieved later on in this article: you can by /proc talking to the “The /proc directory is make changes in /proc files that kernel, and then the change system settings on the information is handed back fundamentally a myth: it fly, but you can’t change to you as though it were a doesn’t really exist.” process data by editing files or file. This makes it great both directories in /proc. Which is for communication between different parts of the system (it’s probably for the best, as it could have interesting results! Do used by various utilities, including the GNU version of ps, with be aware when messing around with the bits of /proc that the major security advantage that such utilities can operate are editable that you’re making changes to your system on entirely in userspace, just interacting with /proc rather than the fly and that it’s possible to screw things up… 56 LXF126 Christmas 2009 www.linuxformat.com LXF126.proc 56 22/10/09 4:24:46 pm /proc and /sysfs /proc and /sysfs /proc and processes here are two main sections to /proc: process data and system data. -
Brief Sysfs Tutorial
Brief sysfs Tutorial Ben Marks Spring 2016 2016, The Nswap2L Project (https://www.cs.swarthmore.edu/~newhall/nswap2L.html) A Few Disclaimers • I’m not a Linux kernel expert … if it segfaults, I’m sorry. (It works for me though!) • There are lots of funcJons that do very similar things. – The code presented here worked for me. – There may be other ways to do the same thing. – There may be easier ways to to the same thing. • Linux Cross Reference and Google are great aids. 2016, The Nswap2L Project (https://www.cs.swarthmore.edu/~newhall/nswap2L.html) First Step … Get a Handle to Sysfs • struct device * my_dev; my_dev = root_device_register( “my_folder” ); – Creates a folder: /sys/devices/my_folder/ – Returns the device struct pointer, or NULL on error • When You’re Done … – void root_device_unregister – ( struct device * my_dev); 2016, The Nswap2L Project (https://www.cs.swarthmore.edu/~newhall/nswap2L.html) Using a Struct Device • Not really that useful. • Most Useful Field: Kobject Struct – struct kobject * ko = my_dev->kobj; • Each folder has an associated kobject struct. – You’ll need the struct kobject * to add subdirectories, add files, etc. 2016, The Nswap2L Project (https://www.cs.swarthmore.edu/~newhall/nswap2L.html) CreaJng Subdirectories • Making a new folder: struct kobject * subdir = kobject_create_and_add( char * name, struct kobject * parent ); – Returns NULL on error. • Free it when you’re done: • void kobject_put( struct kobject * subdir ); 2016, The Nswap2L Project (https://www.cs.swarthmore.edu/~newhall/nswap2L.html) Example struct device * my_dev; struct kobject *root, *s1, *s2; // Create /sys/devices/my_folder my_dev = root_device_register( “my_folder” ); root = my_dev->kobj; // Create /sys/devices/my_folder/subdir1/ s1 = kobject_create_and_add( “subdir1”, root ); // Create /sys/devices/my_folder/subdir1/subdir2/ s2 = kobject_create_and_add( “subdir2”, s1 ); 2016, The Nswap2L Project (https://www.cs.swarthmore.edu/~newhall/nswap2L.html) Bring on the Structs … • Each file is associated with a set of structs. -

Ted Ts'o on Linux File Systems
Ted Ts’o on Linux File Systems An Interview RIK FARROW Rik Farrow is the Editor of ;login:. ran into Ted Ts’o during a tutorial luncheon at LISA ’12, and that later [email protected] sparked an email discussion. I started by asking Ted questions that had I puzzled me about the early history of ext2 having to do with the perfor- mance of ext2 compared to the BSD Fast File System (FFS). I had met Rob Kolstad, then president of BSDi, because of my interest in the AT&T lawsuit against the University of California and BSDi. BSDi was being sued for, among other things, Theodore Ts’o is the first having a phone number that could be spelled 800-ITS-UNIX. I thought that it was important North American Linux for the future of open source operating systems that AT&T lose that lawsuit. Kernel Developer, having That said, when I compared the performance of early versions of Linux to the current version started working with Linux of BSDi, I found that they were closely matched, with one glaring exception. Unpacking tar in September 1991. He also archives using Linux (likely .9) was blazingly fast compared to BSDi. I asked Rob, and he served as the tech lead for the MIT Kerberos explained that the issue had to do with synchronous writes, finally clearing up a mystery for me. V5 development team, and was the architect at IBM in charge of bringing real-time Linux Now I had a chance to ask Ted about the story from the Linux side, as well as other questions in support of real-time Java to the US Navy. -

Network Interface Controller Drivers Release 20.08.0
Network Interface Controller Drivers Release 20.08.0 Aug 08, 2020 CONTENTS 1 Overview of Networking Drivers1 2 Features Overview4 2.1 Speed capabilities.....................................4 2.2 Link status.........................................4 2.3 Link status event......................................4 2.4 Removal event.......................................5 2.5 Queue status event.....................................5 2.6 Rx interrupt.........................................5 2.7 Lock-free Tx queue....................................5 2.8 Fast mbuf free.......................................5 2.9 Free Tx mbuf on demand..................................6 2.10 Queue start/stop......................................6 2.11 MTU update........................................6 2.12 Jumbo frame........................................6 2.13 Scattered Rx........................................6 2.14 LRO............................................7 2.15 TSO.............................................7 2.16 Promiscuous mode.....................................7 2.17 Allmulticast mode.....................................8 2.18 Unicast MAC filter.....................................8 2.19 Multicast MAC filter....................................8 2.20 RSS hash..........................................8 2.21 Inner RSS..........................................8 2.22 RSS key update.......................................9 2.23 RSS reta update......................................9 2.24 VMDq...........................................9 2.25 SR-IOV...........................................9 -
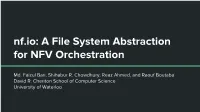
Nf.Io: a File System Abstraction for NFV Orchestration
nf.io: A File System Abstraction for NFV Orchestration Md. Faizul Bari, Shihabur R. Chowdhury, Reaz Ahmed, and Raouf Boutaba David R. Cheriton School of Computer Science University of Waterloo Outline ● What is nf.io? ● Related works ● Why File System abstraction? ● The nf.io File System Abstraction ● Sample Use cases ● System Architecture ● Prototype Implementation ● Work in Progress ● Conclusion 2 What is nf.io? NFV Users / Operators Northbound API for Deploying, Configuring, and Monitoring Virtual Network Functions (VNFs) RESTful? Policy Language? other? NFV Management & Orchestration Southbound API: OpenStack nova/neutron, libvirt, OpenFlow etc. Compute Network VNFs NFV Infrastructure * Simplified view of ETSI Reference NFV Architecture 3 What is nf.io? NFV Users / Operators Northbound API for Deploying, Configuring, and Monitoring Virtual Network Functions (VNFs) Our Proposal: nf.io NFV Management & Orchestration Southbound API: OpenStack nova/neutron, libvirt, OpenFlow etc. Compute Network VNFs NFV Infrastructure * Simplified view of ETSI Reference NFV Architecture 4 What is nf.io? nfio: A Northbound Interface for NFV Management & Orchestration NFV Management & Orchestration 5 What is nf.io? nfio: A Northbound Interface for NFV Management & Orchestration NFV Management & Orchestration “Everything” (VNF/configuration/ state) is represented in a file system hierarchy nf.io Compute Network VNFs NFV Infrastructure 6 What is nf.io? nfio: A Northbound Interface for “Everything” (VNF/configuration/ NFV Management & state) is represented -

UBI - Unsorted Block Images
UBI - Unsorted Block Images Thomas Gleixner Frank Haverkamp Artem Bityutskiy UBI - Unsorted Block Images by Thomas Gleixner, Frank Haverkamp, and Artem Bityutskiy Copyright © 2006 International Business Machines Corp. Revision History Revision v1.0.0 2006-06-09 Revised by: haver Release Version. Table of Contents 1. Document conventions...........................................................................................................................1 2. Introduction............................................................................................................................................2 UBI Volumes......................................................................................................................................2 Static Volumes ..........................................................................................................................2 Dynamic Volumes.....................................................................................................................3 3. MTD integration ....................................................................................................................................4 Simple partitioning.............................................................................................................................4 Complex partitioning .........................................................................................................................5 4. UBI design ..............................................................................................................................................6