Influence of Frame Stiffness and Rider Position on Bicycle Dynamics: an Analytical Study Trevor Alan Williams University of Wisconsin-Milwaukee
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Devore, Delong & Others Online Auction
09/30/21 08:55:04 09/27/21 Devore, Delong & Others Online Auction Auction Opens: Fri, Sep 3 10:00am PT Auction Closes: Thu, Sep 9 5:30pm PT Lot Title Lot Title 0001 Nice Large Vintage Loom 0029 Beautiful Beveled Glass Panel 0002 Small Vintage Loom 0030 Unique 4-Tier Bamboo & Wood Table 0003 Nice Kindel Teak? Single Drawer Nightstand 0031 Thule Sweden Bicycle Rack 0004 Vintage Mahogany Telephone Table 0032 Vintage Wood & Metal Sled 0005 Vintage Wood Accent Chair Wool backrest is 0033 Vintage Weiman Mahogany Octagon Table Vienna 0034 Nice Cherry Finish Entryway Bench Secession, Austria. 0035 Wrought Metal Quilt Rack 0006 Nice Maple? & Bamboo Single Drawer Table 0036 Hydro-Industries Portable Hose Reel 0007 Contemporary Acrylic Table or Display 0037 Iafuma Folding Lounge Chair 0008 Set of 4 Contemporary Acrylic Chairs 0038 Music Boxes, Candleholders & Other Decor 0009 Vintage Fabric Upholstered Sofa 0039 20 Vintage Tarzan Comics 0010 Vintage Large Carved Wood Picture Frame 0040 18 Various Vintage Comics 0011 Nice MCM Teak 2-Drawer Desk 0041 Large Lot of Unsorted Fashion Jewelry 0012 Vintage Floral Upholstered Cabriole Leg Chair 0042 Balance of Estate 0013 Louis Fifteenth Fauteuil Style Fabric Arm Chair 0043 64ct Various DVD Movies 0014 Vintage Steel 5-Gallon Gas Can 0044 Watering Can & Yard Art Decor 0015 Pair of Steel Vehicle Ramps 0045 Knick Knack Shelf & 3 Wicker Baskets 0016 Vintage Jotul Cast Iron Wood Stove 0046 Large Lot of Unsorted Fashion Jewelry 0017 Sentry Safe Fireproof Combination Safe 0047 Large Lot of Unsorted Fashion Jewelry -

Copake Auction Inc. PO BOX H - 266 Route 7A Copake, NY 12516
Copake Auction Inc. PO BOX H - 266 Route 7A Copake, NY 12516 Phone: 518-329-1142 December 1, 2012 Pedaling History Bicycle Museum Auction 12/1/2012 LOT # LOT # 1 19th c. Pierce Poster Framed 6 Royal Doulton Pitcher and Tumbler 19th c. Pierce Poster Framed. Site, 81" x 41". English Doulton Lambeth Pitcher 161, and "Niagara Lith. Co. Buffalo, NY 1898". Superb Royal-Doulton tumbler 1957. Estimate: 75.00 - condition, probably the best known example. 125.00 Estimate: 3,000.00 - 5,000.00 7 League Shaft Drive Chainless Bicycle 2 46" Springfield Roadster High Wheel Safety Bicycle C. 1895 League, first commercial chainless, C. 1889 46" Springfield Roadster high wheel rideable, very rare, replaced headbadge, grips safety. Rare, serial #2054, restored, rideable. and spokes. Estimate: 3,200.00 - 3,700.00 Estimate: 4,500.00 - 5,000.00 8 Wood Brothers Boneshaker Bicycle 3 50" Victor High Wheel Ordinary Bicycle C. 1869 Wood Brothers boneshaker, 596 C. 1888 50" Victor "Junior" high wheel, serial Broadway, NYC, acorn pedals, good rideable, #119, restored, rideable. Estimate: 1,600.00 - 37" x 31" diameter wheels. Estimate: 3,000.00 - 1,800.00 4,000.00 4 46" Gormully & Jeffrey High Wheel Ordinary Bicycle 9 Elliott Hickory Hard Tire Safety Bicycle C. 1886 46" Gormully & Jeffrey High Wheel C. 1891 Elliott Hickory model B. Restored and "Challenge", older restoration, incorrect step. rideable, 32" x 26" diameter wheels. Estimate: Estimate: 1,700.00 - 1,900.00 2,800.00 - 3,300.00 4a Gormully & Jeffery High Wheel Safety Bicycle 10 Columbia High Wheel Ordinary Bicycle C. -

Download the List of Items to Be Auctioned
Description Description Bicycle 21 speed, red igloo water jug attached Bicycle HUFFY 18 SPEED GIRLS BIKE Bicycle Bicycle Bicycle 24 SPEED ROCKPOINT BICYCLE Bicycle Bicycle Bicycle Trek 800 sport bicycle Bicycle 700 Bicycle Bicycle 20" multi colored bicycle Bicycle girls bike Genesis Illusion Bicycle LIGHT BLUE MAFIABIKES BMX BIKE Bicycle Bicycle Bicycle HYPER SHOCKER 26" MTN BICYCLE Bicycle Shimano Avalon bicycle Bicycle Bicycle Bicycle Schwinn Flight BIKE Bicycle Bicycle Bicycle "B Wipe Out" 8111-69DWA Bicycle Huffy Highland Mountain Bike Bicycle 20" gray boys bike Bicycle Bicycle Bicycle bad condition bike Bicycle HUFFY EVOLUTION BIKE Bicycle 24" white Laguna female style bicycle Bicycle SHADOW Bicycle MGX 12 Speed Bicycle Bicycle RED HUFFY Bicycle Bike W/FRONT BASKET Bicycle Blue Mongoose Camrock Bicycle Bicycle Schwinn High Timber Bicycle HUFFY THUNDER RIDGE BICYCLE Bicycle MONGOOSE 21 SPEED BICYCLE Bicycle RED SCHWINN RADGER Bicycle SCHWINN BIKE Bicycle mens Mt. Bike Bicycle LADIES MOUNTAIN BIKE Bicycle 21 SPEED MOUNTAIN BIKE Bicycle Bicycle Bicycle 12" BOYS XGAMES FS12 Bicycle RADIO FLYER TRICYCLE Bicycle MADD GEAR TWO WHEEL SCOOTER Bicycle MAGNA GIRLS BIKE Bicycle Bicycle Bicycle Pulse PerformancePro Scooter Bicycle RED OLDER MODEL BICYCLE Bicycle HUFFY SUMMIT RIDGE MTN BIKE Bicycle SILVER SCHWINN SKYLINER Bicycle Girls Schwinn Ranger Bicycle Bicycle Next mountain bicycle Bicycle BMX 20" Bicycle Bicycle Bicycle Ultra Terrain model. Bicycle Magna Great Divide 20" Girls Bike Bicycle Model PX6.0 WhtBike Bicycle Bicycle Bicycle Mongoose Revolution Bicycle 26" Kent La Jolla street cruiser bicycle Bicycle BLUE NEXT 15 SPEED BICYCLE Bicycle 20" Mongoose Booster BMX bike Bicycle 7 SPEED 20" BICYCLE Bicycle NEXT TURBO Bicycle GREEN HUFFY TERRAZONE Bicycle Free Spirit outrage mountain bike Bicycle HUFFY STONE MTN MAN'S BICYCLE Bicycle Evolution Pacific Bicycle Bicycle Mt. -
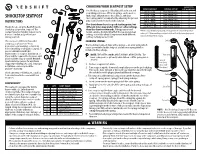
Shockstop Seatpost Is Fully Adjustable to T You and Your Riding Preference
4 CHOOSING YOUR SEATPOST SETUP SUGGESTED RIDER WEIGHT SPRING SETUP INITIAL PRELOAD 9 3 The Shockstop seatpost is fully adjustable to t you and your riding preference. Dierent springs can be used to < 110 lb / 50 kg Main Spring Only 1 make large adjustments to the stiness, and then 132lb / 60 kg Main Spring Only 2 SHOCKSTOP SEATPOST ne-tuning can be accomplished by adjusting the preload 154 lb / 70 kg Main Spring Only 3 plug located at the bottom of the seatpost. 176 lb / 80 kg Main Spring Only 4* INSTRUCTIONS 11 2 198 lb / 90 kg Main + Inner Spring 2 The chart shown here is a good starting point, but 220 lb / 100 kg Main + Inner Spring 3 Thanks for choosing the Redshift Sports dierent riders may prefer stier or softer settings 242 lb / 110 kg (max) Main + Inner Spring 4 ShockStop Suspension Seatpost! The 5 than the chart recommends. Riding position and *When using the Main Spring Only, the maximum recommended preload seatpost provides tunable suspension to terrain can also dramatically aect the required preload setting is 4. Riders needing more preload should add the Inner Spring and increase comfort and performance setting, so don’t be afraid to experiment with dierent 10 start at a lower preload setting. during your ride. settings to nd your best ride! This seatpost is dierent than other CHANGING SPRINGS End Cap seatposts, so please read these instructions and warnings completely The ShockStop Seatpost ships with 2 springs – an outer spring which before installing or using the seatpost. If comes pre-installed in the seatpost, and an inner spring which is you are unfamiliar with bike 9 included in the package. -

Collapsible Bicycle Frame Keith Stone Central Washington University, [email protected]
Central Washington University ScholarWorks@CWU Mechanical Engineering and Technology Senior Student Scholarship and Creative Works Projects Spring 4-27-2015 Collapsible Bicycle Frame Keith Stone Central Washington University, [email protected] Follow this and additional works at: http://digitalcommons.cwu.edu/cwu_met Part of the Mechanical Engineering Commons Recommended Citation Stone, Keith, "Collapsible Bicycle Frame" (2015). Mechanical Engineering and Technology Senior Projects. Book 28. http://digitalcommons.cwu.edu/cwu_met/28 This Book is brought to you for free and open access by the Student Scholarship and Creative Works at ScholarWorks@CWU. It has been accepted for inclusion in Mechanical Engineering and Technology Senior Projects by an authorized administrator of ScholarWorks@CWU. Collapsible Bicycle Frame By Keith Stone Table of Contents INTRODUCTION ............................................................................................................................................. 1 Motivation ................................................................................................................................... 1 Function Statement ..................................................................................................................... 1 Requirements .............................................................................................................................. 1 Engineering merit....................................................................................................................... -
![Yuba Bicycles LLC Boda Boda Cargo Cruiser [ Owner's Manual V1.1]](https://docslib.b-cdn.net/cover/6022/yuba-bicycles-llc-boda-boda-cargo-cruiser-owners-manual-v1-1-896022.webp)
Yuba Bicycles LLC Boda Boda Cargo Cruiser [ Owner's Manual V1.1]
1. INTRODUCTION ........................................................................................................................................... 2 2. ASSEMBLY OF YOUR NEW BICYCLE .......................................................................................................... 2 3. GENERAL WARNING .................................................................................................................................. 2 4. OWNER’S RESPONSIBILITY ........................................................................................................................ 3 5. FIGURE OF THE YUBA BODA BODA AND PARTS DESCRIPTION ................................................................ 4 6. ASSEMBLY AND ADJUSTMENT ................................................................................................................ 4 Assembly of the front wheel ................................................................................................................... 5 7. KNOW HOW THE BICYCLE PERFORMS ...................................................................................................... 6 Learn the power of your brakes ............................................................................................................... 6 Avoid toe-clip overlap .............................................................................................................................. 6 Stop riding if you have frame problems. ................................................................................................ -

Bicycles, Tandems and More
2008 BICYCLES, TANDEMS AND MORE SINCE 1973 5627 University Way NE Seattle, WA 98105 206-527-4822 Fax 206-527-8931 35 Years and still rollin’ strong! www.rodcycle.com 1. Who are we? “Buy a shop? Me?”, you ask. Yes, you. That’s the As you look through our 2008 catalog, you’ll notice that best advice that you can get when you are shopping we manufacture more than just bikes. You’ll notice that for a bicycle. What it means is the difference be- we write software, manufacture highly specialized bicycle tween shops is greater than the difference between parts, and made our own phenomenal adjustable fi tting bike brands. machine. All of these products were designed, engi- neered, and produced right here in our shop by people Our philosophy is that when you choose your bi- who have dedicated their lives to the bicycle business. cycle, you should choose it based on the folks who will not only build your bicycle, but also those who A lot of people are surprised when they learn that we will help you get comfortable on the bike, as well as are just 15 people, fi tting, selling, manufacturing, and provide service down the road as you need it. servicing bicycles all in one shop in Seattle’s University District. The truth is, the talented people that work Have you heard of us? here do it because of their love for bicycles and our If you’ve heard of us, it’s not because you saw us in customers who ride them. -

BICYCLE USER MANUAL 1 CER-GUM-V16 2020-07-13 CERVÉLO BICYCLE USER MANUAL for Multi-Speed Racing Bicycles
BICYCLE USER MANUAL 1 CER-GUM-V16 2020-07-13 CERVÉLO BICYCLE USER MANUAL For Multi-Speed Racing Bicycles 16th Edition, 2020 This manual meets EN Standards 14764, 14766 and 14781. All Cervélo bicycles are tested to ISO 4210 and CPSC 16 CFR Part 1512 Bicycle Regulations. IMPORTANT: This manual contains important safety, performance and service information. Read it before you take the first ride on your new bicycle, and keep it for reference. Your Cervélo bicycle will be delivered to you fully assembled by your authorized Cervélo retailer according to the requirements set out in this manual. Additional safety, performance and service information for specific components such as pedals, or for accessories such as helmets or lights that you purchase, may also be available. Make sure that your retailer has given you all the manufacturers’ literature that was included with your bicycle or accessories. In case of a conflict between the instructions in this manual and information provided by a component manufacturer, always follow the component manufacturer’s instructions. If you have any questions or do not understand something, take responsibility for your safety and consult with your retailer as a first point of contact, or with Cervélo directly. NOTE: This manual is not intended as a comprehensive use, service, repair or maintenance manual. Please see your retailer for all service, repairs or maintenance. Your retailer may also be able to refer you to classes, clinics or books on bicycle use, service, repair or maintenance. 2 TABLE OF CONTENTS General Warning ..................... 4 4. Technology ......................19 A Special Note for Parents .............. -

4-H Bicycling Project – Reference Book
4-H MOTTO Learn to do by doing. 4-H PLEDGE I pledge My HEAD to clearer thinking, My HEART to greater loyalty, My HANDS to larger service, My HEALTH to better living, For my club, my community and my country. 4-H GRACE (Tune of Auld Lang Syne) We thank thee, Lord, for blessings great On this, our own fair land. Teach us to serve thee joyfully, With head, heart, health and hand. This project was developed through funds provided by the Canadian Agricultural Adaptation Program (CAAP). No portion of this manual may be reproduced without written permission from the Saskatchewan 4-H Council, phone 306-933-7727, email: [email protected]. Developed in January 2013. Writer: Leanne Schinkel Table of Contents Introduction Objectives .................................................................................................................................................... 1 Getting the Most from this Project ....................................................................................................... 1 Achievement Requirements for this Project ..................................................................................... 2 Safety and Bicycling ................................................................................................................................. 2 Online Safety .............................................................................................................................................. 4 Resources for Learning ............................................................................................................................ -

27 Annual Antique & Classic Bicycle Auction
CATALOG PRICE $4.00 Michael E. Fallon / Seth E. Fallon COPAKE AUCTION INC. 266 Rt. 7A/East Main Street - Box 47, Copake, N.Y. 12516 PHONE (518) 329-1142 FAX (518) 329-3369 Email: [email protected] - Website: www.copakeauction.com 27th Annual Antique & Classic Bicycle Auction Auction: Saturday April 21, 2018 at 9AM Swap Meet: Friday April 20 (6AM ‘til Dusk) Preview: Thur. April 19, 11-5PM – Fri. April 20, 11-5PM - Sat. April 21, 8-9AM TERMS: Everything sold “as is”. No condition reports in descriptions. Bidder must look over every lot to determine condition and authenticity. Cash or Travelers Checks - MasterCard, Visa and Discover Accepted * First time buyers cannot pay by check without a bank letter of credit * 18% buyer's premium, 23% buyer’s premium for LIVEAUCTIONEERS, INVALUABLE & AUCTIONZIP online purchases. National Auctioneers Association CONDITIONS OF SALE 1. Some of the lots in this sale are offered subject to a reserve. This reserve is a confidential minimum price agreed upon by the consignor & COPAKE AUCTION below which the lot will not be sold. In any event when a lot is subject to a reserve, the auctioneer may reject any bid not adequate to the value of the lot. 2. All items are sold “as is” and neither the auctioneer nor the consignor makes any warranties or representations of any kind with respect to the items, and in no event shall they be responsible for the correctness of the catalogue or other description of the physical condition, size, quality, rarity, importance, medium, provenance, period, source, origin or historical relevance of the items and no statement anywhere, whether oral or written, shall be deemed such a warranty or representation. -

20Th Annual Antique & Classic Bicycle Auction
CATALOG PRICE $4.00 Michael E. Fallon Seth E. Fallon COPAKE AUCTION INC. 266 Rt. 7A - Box H, Copake, N.Y. 12516 PHONE (518) 329-1142 FAX (518) 329-3369 Email: [email protected] Website: www.copakeauction.com 20th Annual Antique & Classic Bicycle Auction ************************************ Auction: Saturday April 16, 2011 at 10 am Swap Meet: Friday April 15th Dawn ‘til Dusk Always Accepting Quality Consignments – Contact Us! TERMS: Everything sold “as is”. No condition reports in descriptions. Bidder must look over every lot to determine condition and authenticity. Cash or Travelers Checks Mastercard, Visa and Discover Accepted First time buyers cannot pay by check without a bank letter of credit 15% BUYERS PREMIUM (2% discount for payment of cash or check) National Auctioneers Association - NYS Auctioneers Association CONDITIONS OF SALE 1. Some of the lots in this sale are offered subject to a reserve. This reserve is a confidential minimum price agreed upon by the consignor & COPAKE AUCTION below which the lot will not be sold. In any event when a lot is subject to a reserve, the auctioneer may reject any bid not adequate to the value of the lot. 2. All items are sold "as is" and neither the auctioneer nor the consignor makes any warranties or representations of any kind with respect to the items, and in no event shall they be responsible for the correctness of the catalogue or other description of the physical condition, size, quality, rarity, importance, medium, provenance, period, source, origin or historical relevance of the items and no statement anywhere, whether oral or written, shall be deemed such a warranty or representation. -

Montana Kaimin, April 23, 1998 Associated Students of the University of Montana
University of Montana ScholarWorks at University of Montana Associated Students of the University of Montana Montana Kaimin, 1898-present (ASUM) 4-23-1998 Montana Kaimin, April 23, 1998 Associated Students of the University of Montana Let us know how access to this document benefits ouy . Follow this and additional works at: https://scholarworks.umt.edu/studentnewspaper Recommended Citation Associated Students of the University of Montana, "Montana Kaimin, April 23, 1998" (1998). Montana Kaimin, 1898-present. 9232. https://scholarworks.umt.edu/studentnewspaper/9232 This Newspaper is brought to you for free and open access by the Associated Students of the University of Montana (ASUM) at ScholarWorks at University of Montana. It has been accepted for inclusion in Montana Kaimin, 1898-present by an authorized administrator of ScholarWorks at University of Montana. For more information, please contact [email protected]. Montana Inside: •Mullen tells his dirty little Victoria Secret. Page 2 • Culture to be showcased In Night of Native Arts. Page 7 •Professor changes his tune on affirmative action. of University news Kaim in ___________________________________________________Page 8 Our 1 0 0 th year, Issue94 Kaimin is a Salish w o rd for m essages Thursday, April 23, 1998 Growth management plan aims to increase housing, slash costs Katie Oyan trails and bike lanes in the Missoula “We are, in essence, a separate city,” city limits. Kaimin reporter valley. .................. Schwaller said.___ ___ “Say you’re a student and you have The plan, which was discussed in However, the plan would affect stu to buy a house in Frenchtown and Students could find cheaper places two public hearings before the dents who live off campus.