Time Response 4
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Timing of Load Switches
Application Report SLVA883–April 2017 Timing of Load Switches Nicholas Carley........................................................................................................... Power Switches ABSTRACT Timing of load switches can vary depending on the operating conditions of the system and feature set of the device. At a glance, these variations can seem complex; but, when broken down, each operating condition and feature has a correlation to a change in timing. This application note goes into detail on how each condition or feature can alter the timing of a load switch so that the variations can be prepared for. Contents 1 Overview and Main Questions ............................................................................................. 2 1.1 Definition of Timing Parameters .................................................................................. 2 1.2 Alternative Timing Methods ....................................................................................... 2 1.3 Why is My Rise Time Different than Expected? ................................................................ 3 1.4 Why is My Fall Time Different than Expected? ................................................................. 3 1.5 Why Do NMOS and PMOS Pass FETs Affect Timing Differently?........................................... 3 2 Effect of System Operating Specifications on Timing................................................................... 5 2.1 Temperature........................................................................................................ -

System Step and Impulse Response Lab 04 Bruce A
ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Electrical and Computer Engineering ECE 300 Signals and Systems Spring 2009 System Step and Impulse Response Lab 04 Bruce A. Ferguson, Bob Throne In this laboratory, you will investigate basic system behavior by determining the step and impulse response of a simple RC circuit. You will also determine the time constant of the circuit and determine its rise time, two common figures of merit (FOMs) for circuit building blocks. Objectives 1. Design an experiment by specifying a test setup, choosing circuit component values, and specifying test waveform details to investigate the step and impulse response. 2. Measure the step response of the circuit and determine the rise time, validating your theoretical calculations. 3. Measure the impulse response of the circuit and determine the time constant, validating your theoretical calculations. Prelab Find and bring a circuit board to the lab so you can build the RC circuit. Background As we introduce the study of systems, it will be good to keep the discussion well grounded in the circuit theory you have spent so much of your energy learning. An important problem in modern high speed digital and wideband analog systems is the response limitations of basic circuit elements in high speed integrated circuits. As simple as it may seem, the lowly RC lowpass filter accurately models many of the systems for which speed problems are so severe. There is a basic need to be able to characterize a circuit independent of its circuit design and layout in order to predict its behavior. Consider the now-overly-familiar RC lowpass filter shown in Figure 1. -

Hourglass User and Installation Guide About This Manual
HourGlass Usage and Installation Guide Version7Release1 GC27-4557-00 Note Before using this information and the product it supports, be sure to read the general information under “Notices” on page 103. First Edition (December 2013) This edition applies to Version 7 Release 1 Mod 0 of IBM® HourGlass (program number 5655-U59) and to all subsequent releases and modifications until otherwise indicated in new editions. Order publications through your IBM representative or the IBM branch office serving your locality. Publications are not stocked at the address given below. IBM welcomes your comments. For information on how to send comments, see “How to send your comments to IBM” on page vii. © Copyright IBM Corporation 1992, 2013. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents About this manual ..........v Using the CICS Audit Trail Facility ......34 Organization ..............v Using HourGlass with IMS message regions . 34 Summary of amendments for Version 7.1 .....v HourGlass IOPCB Support ........34 Running the HourGlass IMS IVP ......35 How to send your comments to IBM . vii Using HourGlass with DB2 applications .....36 Using HourGlass with the STCK instruction . 36 If you have a technical problem .......vii Method 1 (re-assemble) .........37 Method 2 (patch load module) .......37 Chapter 1. Introduction ........1 Using the HourGlass Audit Trail Facility ....37 Setting the date and time values ........3 Understanding HourGlass precedence rules . 38 Introducing -

“The Hourglass”
Grand Lodge of Wisconsin – Masonic Study Series Volume 2, issue 5 November 2016 “The Hourglass” Lodge Presentation: The following short article is written with the intention to be read within an open Lodge, or in fellowship, to all the members in attendance. This article is appropriate to be presented to all Master Masons . Master Masons should be invited to attend the meeting where this is presented. Following this article is a list of discussion questions which should be presented following the presentation of the article. The Hourglass “Dost thou love life? Then squander not time, for that is the stuff that life is made of.” – Ben Franklin “The hourglass is an emblem of human life. Behold! How swiftly the sands run, and how rapidly our lives are drawing to a close.” The hourglass works on the same principle as the clepsydra, or “water clock”, which has been around since 1500 AD. There are the two vessels, and in the case of the clepsydra, there was a certain amount of water that flowed at a specific rate from the top to bottom. According to the Guiness book of records, the first hourglass, or sand clock, is said to have been invented by a French monk called Liutprand in the 8th century AD. Water clocks and pendulum clocks couldn’t be used on ships because they needed to be steady to work accurately. Sand clocks, or “hour glasses” could be suspended from a rope or string and would not be as affected by the moving ship. For this reason, “sand clocks” were in fairly high demand in the shipping industry back in the day. -

The International Date Line!
The International Date Line! The International Date Line (IDL) is a generally north-south imaginary line on the surface of the Earth, passing through the middle of the Pacific Ocean, that designates the place where each calendar day begins. It is roughly along 180° longitude, opposite the Prime Meridian, but it is drawn with diversions to pass around some territories and island groups. Crossing the IDL travelling east results in a day or 24 hours being subtracted, so that the traveller repeats the date to the west of the line. Crossing west results in a day being added, that is, the date is the eastern side date plus one calendar day. The line is necessary in order to have a fixed, albeit arbitrary, boundary on the globe where the calendar date advances. Geography For part of its length, the International Date Line follows the meridian of 180° longitude, roughly down the middle of the Pacific Ocean. To avoid crossing nations internally, however, the line deviates to pass around the far east of Russia and various island groups in the Pacific. In the north, the date line swings to the east of Wrangel island and the Chukchi Peninsula and through the Bering Strait passing between the Diomede Islands at a distance of 1.5 km (1 mi) from each island. It then goes southwest, passing west of St. Lawrence Island and St. Matthew Island, until it passes midway between the United States' Aleutian Islands and Russia's Commander Islands before returning southeast to 180°. This keeps Russia which is north and west of the Bering Sea and the United States' Alaska which is east and south of the Bering Sea, on opposite sides of the line in agreement with the date in the rest of those countries. -
Control Systems
ECE 380: Control Systems Course Notes: Winter 2014 Prof. Shreyas Sundaram Department of Electrical and Computer Engineering University of Waterloo ii c Shreyas Sundaram Acknowledgments Parts of these course notes are loosely based on lecture notes by Professors Daniel Liberzon, Sean Meyn, and Mark Spong (University of Illinois), on notes by Professors Daniel Davison and Daniel Miller (University of Waterloo), and on parts of the textbook Feedback Control of Dynamic Systems (5th edition) by Franklin, Powell and Emami-Naeini. I claim credit for all typos and mistakes in the notes. The LATEX template for The Not So Short Introduction to LATEX 2" by T. Oetiker et al. was used to typeset portions of these notes. Shreyas Sundaram University of Waterloo c Shreyas Sundaram iv c Shreyas Sundaram Contents 1 Introduction 1 1.1 Dynamical Systems . .1 1.2 What is Control Theory? . .2 1.3 Outline of the Course . .4 2 Review of Complex Numbers 5 3 Review of Laplace Transforms 9 3.1 The Laplace Transform . .9 3.2 The Inverse Laplace Transform . 13 3.2.1 Partial Fraction Expansion . 13 3.3 The Final Value Theorem . 15 4 Linear Time-Invariant Systems 17 4.1 Linearity, Time-Invariance and Causality . 17 4.2 Transfer Functions . 18 4.2.1 Obtaining the transfer function of a differential equation model . 20 4.3 Frequency Response . 21 5 Bode Plots 25 5.1 Rules for Drawing Bode Plots . 26 5.1.1 Bode Plot for Ko ....................... 27 5.1.2 Bode Plot for sq ....................... 28 s −1 s 5.1.3 Bode Plot for ( p + 1) and ( z + 1) . -

Calculating Percentages for Time Spent During Day, Week, Month
Calculating Percentages of Time Spent on Job Responsibilities Instructions for calculating time spent during day, week, month and year This is designed to help you calculate percentages of time that you perform various duties/tasks. The figures in the following tables are based on a standard 40 hour work week, 174 hour work month, and 2088 hour work year. If a recurring duty is performed weekly and takes the same amount of time each week, the percentage of the job that this duty represents may be calculated by dividing the number of hours spent on the duty by 40. For example, a two-hour daily duty represents the following percentage of the job: 2 hours x 5 days/week = 10 total weekly hours 10 hours / 40 hours in the week = .25 = 25% of the job. If a duty is not performed every week, it might be more accurate to estimate the percentage by considering the amount of time spent on the duty each month. For example, a monthly report that takes 4 hours to complete represents the following percentage of the job: 4/174 = .023 = 2.3%. Some duties are performed only certain times of the year. For example, budget planning for the coming fiscal year may take a week and a half (60 hours) and is a major task, but this work is performed one time a year. To calculate the percentage for this type of duty, estimate the total number of hours spent during the year and divide by 2088. This budget planning represents the following percentage of the job: 60/2088 = .0287 = 2.87%. -

Chapter 4 HW Solution
ME 380 Chapter 4 HW February 27, 2012 Chapter 4 HW Solution Review Questions. 1. Name the performance specification for first order systems. Time constant τ. 2. What does the performance specification for a first order system tell us? How fast the system responds. 5. The imaginary part of a pole generates what part of the response? The un-decaying sinusoidal part. 6. The real part of a pole generates what part of the response? The decay envelope. 8. If a pole is moved with a constant imaginary part, what will the responses have in common? Oscillation frequency. 9. If a pole is moved with a constant real part, what will the responses have in common? Decay envelope. 10. If a pole is moved along a radial line extending from the origin, what will the responses have in common? Damping ratio (and % overshoot). 13. What pole locations characterize (1) the underdamped system, (2) the overdamped system, and (3) the critically damped system? 1. Complex conjugate pole locations. 2. Real (and separate) pole locations. 3. Real identical pole locations. 14. Name two conditions under which the response generated by a pole can be neglected. 1. The pole is \far" to the left in the s-plane compared with the other poles. 2. There is a zero very near to the pole. Problems. Problem 2(a). This is a 1st order system with a time constant of 1/5 second (or 0.2 second). It also has a DC gain of 1 (just let s = 0 in the transfer function). The input shown is a unit step; if we let the transfer function be called G(s), the output is input × transfer function. -

Prime Meridian ×
This website would like to remind you: Your browser (Apple Safari 4) is out of date. Update your browser for more × security, comfort and the best experience on this site. Encyclopedic Entry prime meridian For the complete encyclopedic entry with media resources, visit: http://education.nationalgeographic.com/encyclopedia/prime-meridian/ The prime meridian is the line of 0 longitude, the starting point for measuring distance both east and west around the Earth. The prime meridian is arbitrary, meaning it could be chosen to be anywhere. Any line of longitude (a meridian) can serve as the 0 longitude line. However, there is an international agreement that the meridian that runs through Greenwich, England, is considered the official prime meridian. Governments did not always agree that the Greenwich meridian was the prime meridian, making navigation over long distances very difficult. Different countries published maps and charts with longitude based on the meridian passing through their capital city. France would publish maps with 0 longitude running through Paris. Cartographers in China would publish maps with 0 longitude running through Beijing. Even different parts of the same country published materials based on local meridians. Finally, at an international convention called by U.S. President Chester Arthur in 1884, representatives from 25 countries agreed to pick a single, standard meridian. They chose the meridian passing through the Royal Observatory in Greenwich, England. The Greenwich Meridian became the international standard for the prime meridian. UTC The prime meridian also sets Coordinated Universal Time (UTC). UTC never changes for daylight savings or anything else. Just as the prime meridian is the standard for longitude, UTC is the standard for time. -

Effect of Source Inductance on MOSFET Rise and Fall Times
Effect of Source Inductance on MOSFET Rise and Fall Times Alan Elbanhawy Power industry consultant, email: [email protected] Abstract The need for advanced MOSFETs for DC-DC converters applications is growing as is the push for applications miniaturization going hand in hand with increased power consumption. These advanced new designs should theoretically translate into doubling the average switching frequency of the commercially available MOSFETs while maintaining the same high or even higher efficiency. MOSFETs packaged in SO8, DPAK, D2PAK and IPAK have source inductance between 1.5 nH to 7 nH (nanoHenry) depending on the specific package, in addition to between 5 and 10 nH of printed circuit board (PCB) trace inductance. In a synchronous buck converter, laboratory tests and simulation show that during the turn on and off of the high side MOSFET the source inductance will develop a negative voltage across it, forcing the MOSFET to continue to conduct even after the gate has been fully switched off. In this paper we will show that this has the following effects: • The drain current rise and fall times are proportional to the total source inductance (package lead + PCB trace) • The rise and fall times arealso proportional to the magnitude of the drain current, making the switching losses nonlinearly proportional to the drain current and not linearly proportional as has been the common wisdom • It follows from the above two points that the current switch on/off is predominantly controlled by the traditional package's parasitic -

Example Problems and Solutions
EXAMPLE PROBLEMS AND SOLUTIONS A-5-1. In the system of Figure 5-52, x(t) is the input displacement and B(t) is the output angular displacement. Assume that the masses involved are negligibly small and that all motions are restricted to be small; therefore, the system can be considered linear. The initial conditions for x and 0 are zeros, or x(0-) = 0 and H(0-) = 0. Show that this system is a differentiating element. Then obtain the response B(t) when x(t)is a unit-step input. Solution. The equation for the system is b(X - L8) = kLB or The Laplace transform of this last equation, using zero initial conditions, gives And so Thus the system is a differentiating system. For the unit-step input X(s) = l/s,the output O(s)becomes The inverse Laplace transform of O(s)gives Figure 5-52 Mechanical system. Chapter 5 / Transient and Steady-State Response Analyses Figure 5-53 Unit-step input and the response of the mechanical s) stem shown in Figure 5-52. Note that if the value of klb is large the response O(t) approaches a pulse signal as shown in Figure 5-53. A-5-2. Consider the mechanical system shown in Figure 5-54. Suppose that the system is at rest initially [x(o) = 0, i(0) = 01, and at t = 0 it is set into motion by a unit-impulse force. Obtain a mathe- matical model for the system.Then find the motion of the system. Solution. The system is excited by a unit-impulse input. -
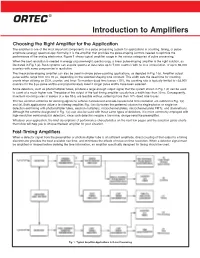
Introduction to Amplifiers
ORTEC ® Introduction to Amplifiers Choosing the Right Amplifier for the Application The amplifier is one of the most important components in a pulse processing system for applications in counting, timing, or pulse- amplitude (energy) spectroscopy. Normally, it is the amplifier that provides the pulse-shaping controls needed to optimize the performance of the analog electronics. Figure 1 shows typical amplifier usage in the various categories of pulse processing. When the best resolution is needed in energy or pulse-height spectroscopy, a linear pulse-shaping amplifier is the right solution, as illustrated in Fig. 1(a). Such systems can acquire spectra at data rates up to 7,000 counts/s with no loss of resolution, or up to 86,000 counts/s with some compromise in resolution. The linear pulse-shaping amplifier can also be used in simple pulse-counting applications, as depicted in Fig. 1(b). Amplifier output pulse widths range from 3 to 70 µs, depending on the selected shaping time constant. This width sets the dead time for counting events when utilizing an SCA, counter, and timer. To maintain dead time losses <10%, the counting rate is typically limited to <33,000 counts/s for the 3-µs pulse widths and proportionately lower if longer pulse widths have been selected. Some detectors, such as photomultiplier tubes, produce a large enough output signal that the system shown in Fig. 1(d) can be used to count at a much higher rate. The pulse at the output of the fast timing amplifier usually has a width less than 20 ns.