Final Report Disclaimer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Using Custom Transportation Data Collection Software with Handheld
1 Validating Predicted Rural Corridor Travel Times from an Automated License Plate Recognition System: Oregon’s Frontier Project Robert L. Bertini Matthew Lasky Christopher M. Monsere Department of Civil & Environmental Engineering Portland State University P.O. Box 751 Portland, OR 97207-0751 Phone: 503-725-4249 Fax: 503-725-5950 Email: [email protected] SUMMARY This paper summarizes the results of a field validation of a corridor travel time prediction system that uses automated license plate recognition–the Frontier Travel Time project. As part of the Frontier project, the Oregon Department of Transportation deployed a video image processing system with license plate recognition and privacy-protecting data encryption, a central server, and proprietary algorithms to predict corridor travel times on a 25 mile section of rural highway in northwest Oregon. The system predicted travel times were compared to data independently collected by probe vehicles equipped with Global Positioning System devices. The comparison shows that the predicted travel times were not statistically different than the travel times observed by the probe vehicles. Despite attempts to validate the system under congested conditions, all comparisons were made under essentially free flow travel. Further validation of the system in a congested corridor with alternate routes is recommended. INTRODUCTION Traveler information systems, designed to predict travel times and delays have primarily been implemented in large metropolitan areas. High volumes of commuter and time-sensitive freight traffic, availability of alternate routes, departure times and modes, and in many cases instrumented freeways, make developing these systems cost-effective and useful for the traveling public. The California-Oregon Advanced Transportation System (COATS) has been a joint effort between California and Oregon Departments of Transportation to demonstrate that advanced transportation technologies can successfully be transferred to rural environments. -

Business Meeting Agenda – March 10, 2016
AGENDA Thursday, March 10, 2016 - 10:00 AM BOARD OF COUNTY COMMISSIONERS Beginning Board Order No. 2016-26 CALL TO ORDER Roll Call Pledge of Allegiance I. CITIZEN COMMUNICATION (The Chair of the Board will call for statements from citizens regarding issues relating to County government. It is the intention that this portion of the agenda shall be limited to items of County business which are properly the object of Board consideration and may not be of a personal nature. Persons wishing to speak shall be allowed to do so after registering on the blue card provided on the table outside of the hearing room prior to the beginning of the meeting. Testimony is limited to three (3) minutes. Comments shall be respectful and courteous to all.) II. PUBLIC HEARING (The following items will be individually presented by County staff or other appropriate individuals. Persons appearing shall clearly identify themselves and the department or organization they represent. In addition, a synopsis of each item, together with a brief statement of the action being requested shall be made by those appearing on behalf of an agenda item.) 1. First Reading of Ordinance No. _____ Amending Chapter 6.06, Parks Rules of the Clackamas County Code (Rick Gruen, Business and Community Services) III. CONSENT AGENDA (The following Items are considered to be routine, and therefore will not be allotted individual discussion time on the agenda. Many of these items have been discussed by the Board in Work Sessions. The items on the Consent Agenda will be approved in one motion unless a Board member requests, before the vote on the motion, to have an item considered at its regular place on the agenda.) A. -

Volume III: Appendices
Volume III: Appendices REVIEW DRAFT This page intentionally left blank. REVIEW DRAFT APPENDIX A: ACTION ITEM FORMS The following table lists the action item number, timeline, status, priority, affected jurisdictions, and associated hazards. Note: See addenda for each city’s action item forms and action item prioritization. Table A-1 Action Item Summary, Partner Jurisdictions, and Associated Hazards Partner Jurisdiction(s) Related Hazard Action Item Priority Timeline Status Bay Depoe City Lincoln Newport Siletz Toledo Waldport Yachats Erosion Coastal Drought Earthquake Flood Landslide Tsunami Volcano Wildfire Windstorm WinterStorm Multi Hazard #1 Long Deferred X X X X X X X X X X X X Multi Hazard #2 Ongoing Ongoing X X X X X X X X X X X X X X X Multi Hazard #3 Short Ongoing X X X X X X X X X X X X X Multi Hazard #4 Ongoing Ongoing X X X X X X X X X X X X X X X X X Multi Hazard #5 Ongoing Ongoing X X X X X X X X X X X X Multi Hazard #6 X Medium Ongoing X X X X X X X X X X X X X X X X X Multi Hazard #7 X Medium Deferred X X X X X X X X X X X X X X X X Multi Hazard #8 X Short New X X X X X X Coastal Erosion #1 Ongoing Ongoing X X X X Coastal Erosion #2 X Ongoing Ongoing X X X X X Earthquake #1 X Short Ongoing X X X X X X X X Earthquake #2 X Long Ongoing X X X X X X X X X Earthquake #3 X Long Ongoing X X X X X X X X Tsunami #1 X Long Ongoing X X X X Tsunami #2 Medium Ongoing X X X Flood #1 Short Deferred X X X X X Flood #2 Short Deferred X X X X Flood #3 Ongoing Ongoing X X X X Flood # 4 Ongoing Ongoing X X X X X X X X Landslide #1 Ongoing -

Amendment Master Format
Additional pages for Agenda Item IX. New Business 1 Resolution 2016-3315 Misc. Contracts and Agreements No. 29496 AMENDMENT NUMBER 01 INTERGOVERNMENTAL AGREEMENT FOR RIGHT OF WAY SERVICES Oregon Route 18: Newberg-Dundee Bypass (Phase 1) City of Newberg This is Amendment No. 01 to the Agreement between the STATE OF OREGON, acting by and through its Department of Transportation, hereinafter referred to as “State,” and CITY OF NEWBERG, acting by and through its designated officials, hereinafter referred to as “Agency.” The Parties entered into an Agreement on August 14, 2013. It has now been determined by State and Agency that the Agreement referenced above shall be amended to reinstate the Agreement, update language, and extend the expiration date. 1. Effective Date. This Amendment shall become effective on the date it is fully executed and approved as required by applicable law. 2. Amendment to Agreement. a. Insert new RECITALS, Paragraph 6, to read as follows: 6. As of this time there are no local public agencies (LPAs) certified to independently administer federal-aid projects for right of way services. Therefore, State is ultimately responsible for the certification and oversight of all right of way activities under this Agreement (except as provided under “Agency Obligations” for LPAs in State’s certification program for consultant selection). b. TERMS OF AGREEMENT, Paragraph 2, Page 2, which reads: 2. The work shall begin on the date all required signatures are obtained and shall be completed no later than June 30, 2016, on which date this Agreement automatically terminates unless extended by a fully executed amendment. -

Dayton Forward: a Vision for the Future
DAY TON FORWARD A Vision for the Future | Dayton, Oregon 2012 CONTENTS Dayton’s Role 4 Goals, Planning Guidelines & Action Items: 1: Community 6 2: Urban Form 8 3: Image/Environment 14 4: Economic Development 16 Adopted by Dayton City Council - December 03, 2012 5: Historic Resources 17 6: Landscape/Open Space 18 7: Waterfront 22 8: Recreation 24 9: Education 26 10: Arts & Culture 27 11: Housing 28 Prepared for: 12: Urban Services/Amenities 29 Dayton Community Development Association Kelly Haverkate - Program Coordinator 13: Transportation 30 City of Dayton 14: Energy 31 Jolie White - Mayor 15: Infrastructure 34 Christy Ellis Wurster - City Manager Next Steps 35 Prepared by: Models and Resources 39 Ernest R. Munch • Architecture • Urban Planning LLC Ernie Munch - Architect, Urban Planner Process 44 Jonathan Mosteiro - Planning Intern Acknowledgements 45 E.D. Hovee Co. - Economic Development Consultant 2 DAYTON’S VISION 3 Dayton’s Future Role... Joel Palmer and his son-in-law, Andrew Smith, founded Dayton in 1850, for the processing and transshipment of agricultural products grown in the Yamhill Valley and then sold to the rest of the world which, at that time, included Californian and Fraser Canyon gold miners. By 1900, however, river flooding, then railroads, and finally the age of the automobile left Dayton as a good place to live, but without a viable commercial role. Now, in 2012, Dayton’s citizens have redefined their small town to prosper in the 21st Century. The four roles described below are designed to support each other and revitalize future Dayton as a unique community within Yamhill County. -

Amended 5/21/18 Kent Taylor Civic Hall 200 NE Second Street
Amended 5/21/18 Kent Taylor Civic Hall 200 NE Second Street McMinnville, OR 97128 City Council Meeting Agenda Tuesday, May 22, 2018 5:30 p.m. – Executive Session 6:00 p.m. – Work Session – Joint Meeting of the City Council and Visit McMinnville Board of Directors 7:00 p.m. – Regular Council Meeting Welcome! All persons addressing the Council will please use the table at the front of the Council Chambers. All testimony is electronically recorded. Public participation is encouraged. If you desire to speak on any agenda item, please raise your hand to be recognized after the Mayor calls the item. If you wish to address Council on any item not on the agenda, you may respond as the Mayor calls for “Invitation to Citizens for Public Comment.” 5:30 PM EXECUTIVE SESSION – CONFERENCE ROOM EXECUTIVE SESSION: EXECUTIVE SESSION UNDER ORS 192.660(2)(d) TO CONDUCT DELIBERATIONS WITH PERSONS DESIGNATED TO CARRY OUT LABOR NEGOTIATIONS. 6:00 PM – Joint Meeting of the City Council and Visit McMinnville Board of Directors – COUNCIL CHAMBERS 1. Call to Order 2. Recap of Visit McMinnville 2017 Work Plan. 3. Presentation of Visit McMinnville 2018 Budget and Work Plan. 4. Presentation of Conference Center Feasibility Study. 5. Adjournment 7:00 PM – REGULAR COUNCIL MEETING – COUNCIL CHAMBERS 1. CALL TO ORDER 2. PLEDGE OF ALLEGIANCE 3. INVITATION TO CITIZENS FOR PUBLIC COMMENT – The Mayor will announce that any interested audience members are invited to provide comments. Anyone may speak on any topic other than: a matter in litigation, a quasi-judicial land use matter; or a matter scheduled for public hearing at some future date. -
REQUEST for COUNCIL ACTION DATE ACTION REQUESTED: June 19, 2017 Order Ordinance Resolution XX Motion Information ___ No
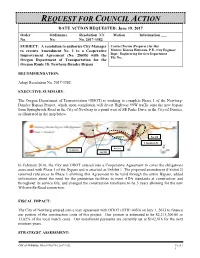
REQUEST FOR COUNCIL ACTION DATE ACTION REQUESTED: June 19, 2017 Order Ordinance Resolution XX Motion Information ___ No. No. No. 2017-3382 SUBJECT: A resolution to authorize City Manager Contact Person (Preparer) for this to execute Amendment No. 1 to a Cooperative Motion: Kaaren Hofmann, P.E., City Engineer Improvement Agreement (No. 28658) with the Dept.: Engineering Services Department File No.: Oregon Department of Transportation for the Oregon Route 18: Newberg-Dundee Bypass RECOMMENDATION: Adopt Resolution No. 2017-3382. EXECUTIVE SUMMARY: The Oregon Department of Transportation (ODOT) is working to complete Phase 1 of the Newberg- Dundee Bypass Project, which upon completion will divert Highway 99W traffic onto the new bypass from Springbrook Road in the City of Newberg to a point west of SE Parks Drive in the City of Dundee, as illustrated in the map below. PHASE 1G PHASE 1E Hwy 99W S. Springbrook Rd. Hwy 219 SE Parks Dr. Hwy 99W In February 2016, the City and ODOT entered into a Cooperative Agreement to cover the obligations associated with Phase 1 of the Bypass and is attached as Exhibit 1. The proposed amendment (Exhibit 2) removed references to Phase 1 allowing this Agreement to be valid through the entire Bypass; added information about the need for the pedestrian facilities to meet ADA standards at construction and throughout its service life; and changed the construction timeframe to be 5 years allowing for the new Wilsonville Road connection. FISCAL IMPACT: The City of Newberg entered into a loan agreement with ODOT (OTIF-0050) on July 1, 2013 to finance our portion of the construction costs of this project. -

Willamina to Salem Corridor Oregon Highway Route 22
Willamina to Salem Corridor Oregon Highway Route 22 Highway 18 lnterchange to the Salem Eastern Urban Growth Boundary, Deer Park (Gaffin Road) lnterchange nterim Corridor Strategy January 1996 OTC Endorsement dune "996 Willamina to Salem Corridor Oregon Highway Route 22 Highway 18 lnterchange to the Salem Eastern Urban Growth Boundary, Deer Park (Gaffin Road) lnterchange Interim Corridor Strategy January 1996 OTC Endorsement June 1996 Prepared by: Oregon Department of Transportation W&H Pacific Jeanne Lawson Associates Implementation of this corridor strategy and plan is dependent upon the availability of funding. Endorsement or adoption of the Plan by the Oregon Transportation Commission does not guarantee adequate financial resources to carry out the projects and programs contained in the Plan, nor can the Commission commit the financial resources of other agencies or public bodies. Table of Contents ES EXECUTIVE SUMMARY 1. OVERVIEW OF CORRIDOR PLANNING A. Introduction B. Corridor Planning Description and Purpose C. Planning Requirements D. Corridor Planning Process E. Corridor Planning Participants 2. HIGHWAY 22 CORRIDOR OVERVIEW A. General Corridor Description Highway 18 to Highway 51. Highway 51 to Deer Park (Gaffin Road) Interchange 9. Existing Plans and Studies C. Population and Employment Growth 3. EXISTING CONDITIONS AND FACILITIES A. Highway System B. Railroads C. Airports D. Public Transit and lntercity Bus E. Bicycle Facilities F. Pedestrian Walkways G. Pipelines 4. FUTURE CONDITIONS A, Highway System B. Railroads C. Airports Q. Publ~cTransit and Intercity Bus E. Bicycle Facilities F. Pedestrian Walkways 5. ISSUES, OPPORTUNITIES AND CONSTRAINTS A. lntrocuction B. Transportation Balance C. Regional Connectivity D. Highway Congestion E. Safety F. -

2.14-18 Yamhill County.Pdf
TRANSPORTATION AND GROWTH MANAGEMENT PROGRAM 2018 GRANT APPLICATION APPLICATIONS DUE 4:00 PM, June 8, 2018 Note: This form must be filled out using the latest version of Adobe Acrobat or Reader. Download the latest version of Reader here: https://get.adobe.com/reader/ Download the Application, Application Packet, and Racial and Ethnic Impact Statement at: https://www.oregon.gov/LCD/TGM/Pages/Grants.aspx. Also on the web page are examples of successful TGM Applications, a list of all TGM grants to date, and help for developing a project approach and budget. Type of Grant: Category 2 ODOT Region (1-5): Region 2 Primary Applicant Jurisdiction: Yamhill County Project Title: Yamhelas Westsider Trail Master Plan Mailing Address: 535 NE Fifth Street City/Zip: McMinnville 97128 Contact Person: Laura Tschabold Contact Person Title: County Administrator Telephone/Email: 503-434-7501 [email protected] MATCH YES NO Co-Applicants involved in the project: Summary Description of Project: This section must be completed. Do not refer to text within the application form. In no more than 1000 characters, describe the purpose of your project and the expected outcomes. The Yamhelas Westsider Trail Master Plan will provide a comprehensive and clearly defined road map to advance a multi-modal transportation project from acquisition to construction. When complete, the 17-mile trail will offer an active transportation link between two counties and four cities in the heart of Oregon wine country, while also supporting regional recreation and tourism, and allowing the movement of agricultural products and equipment. The development of a multi-phasic, actionable Master Plan will guide the county, stakeholders, and participating agencies in a collaborative and process that will enable the project to progress toward construction. -

Intelligent Transportation Systems Maintenance Plan
INTELLIGENT TRANSPORTATION SYSTEMS MAINTENANCE PLAN VOLUME TWO: TECHNICAL APPENDICES Prepared by Chris Strong, Research Associate Robb Larson, Adjunct Assistant Professor of Mechanical Engineering Alan McAllister, Research Assistant of the Western Transportation Institute Department of Civil Engineering College of Engineering Montana State University - Bozeman for the State of Oregon Department of Transportation Technical Services Traffic Management Section Intelligent Transportation Systems Unit December 1999 DISCLAIMER The opinions, findings and conclusions expressed in this publication are those of the authors and not necessarily those of the Oregon Department of Transportation. Alternative accessible formats of this document will be provided upon request. Persons with disabilities who need an alternative accessible format of this information, or who require some other reasonable accommodation to participate, should contact the Oregon Department of Transportation, at: Galen McGill, Manager, Intelligent Transportation Systems Unit, Division of Technical Services, Traffic Management Section, 355 Capitol Street NE, Fifth Floor, Salem, OR 97301-3871; telephone number (503) 986-4486. Western Transportation Institute i ACKNOWLEDGMENTS Grateful appreciation is extended to the following agencies for their support, guidance and advice that facilitated the successful completion of this report. Specifically appreciated are the ITS Working Group; and the various programs, divisions and districts/regions of the Oregon Department of Transportation. Thanks also go to all the individuals within ODOT who took time to complete surveys and assist in data collection efforts without which this effort would fail. Thanks go to those who assisted in providing research and background material for this report, including but not limited to the staff of the Montana State University library, staff of several state Departments of Transportation, and representatives of many product vendors. -

H.B. Van Duzer Forest Corridor—Steel Bridge Road
Mini-RFP 33499 - Exhibit C H.B. Van Duzer Forest Corridor—Steel Bridge Road ORE 18/ORE 22 Polk County Revised Environmental Assessment Oregon Department of Transportation Federal Highway Administration July 2004 Mini-RFP 33499 - Exhibit C Conversion Factors English Units Multiply By Metric Units foot (ft) 0.3048 meter (m) mile (mi) 1.609 kilometer (km) cubic yard 0.7646 cubic meter acre (ac) 0.4047 hectare (ha) miles per hour (mph) 1.609 kilometers per hour (km/h) Alternative Format Availability In compliance with the Americans With Disabilities Act, alternative formats of this document will be made available upon request. Mini-RFP 33499 - Exhibit C Mini-RFP 33499 - Exhibit C Mini-RFP 33499 - Exhibit C Mini-RFP 33499 - Exhibit C Mini-RFP 33499 - Exhibit C Contents Section Page Acronyms and Abbreviations ......................................................................................................vii Glossary............................................................................................................................................. ix Introduction........................................................................................................................................1 Alternatives Analysis Summary ............................................................................................2 Description of the Preferred Alternative ......................................................................................7 Background...............................................................................................................................7 -

City Council Agenda January 19, 2016, 7:00 Pm Public Safety Building Training Room (401 East Third Street)
CITY COUNCIL AGENDA JANUARY 19, 2016, 7:00 PM PUBLIC SAFETY BUILDING TRAINING ROOM (401 EAST THIRD STREET) Mission Statement The City of Newberg serves its citizens, promotes safety, and maintains a healthy community. Vision Statement Newberg will cultivate a healthy, safe environment where citizens can work, play and grow in a friendly, dynamic and diverse community valuing partnerships and opportunity. I. CALL MEETING TO ORDER II. ROLL CALL III. PLEDGE OF ALLEGIANCE IV. CITY MANAGER’S REPORT V. PUBLIC COMMENTS (30 minutes maximum, which may be extended at the Mayor’s discretion, with an opportunity to speak for no more than 5 minutes per speaker allowed) VI. CONSENT CALENDAR 1. Minutes from January 4, 2016 Pages 1-5 2. Resolution 2016-3246, A Resolution authorizing the City Manager Pro Tem Pages 6-9 to appoint recommended candidates to positions in multiple departments VII. PUBLIC HEARING – ADMINISTRATIVE 1. Resolution 2016-3245, A Resolution authorizing a hardship request for Pages 10-43 water service to 14995 NE Cullen Road. 2. Resolution 2016-3249, A Resolution to adopt supplemental budget #1 Pages 44-50 for Fiscal Year 2015-2016 beginning July 1, 2015 and ending June 30, 2016. VIII. NEW BUSINESS 1. Presentation on Pavement Funding Options. Pages 51-134 Agenda continued on next page The Mayor reserves the right to change the order of items to be considered by the Council at their meeting. No new items will be heard after 11:00 p.m., unless approved by the Council. City of Newberg: City Council Agenda (January 19, 2016) Page 1 of 2 VIII.