Systematic Errors in High-Precision Gravity Measurements by Light-Pulse Atom Interferometry on the Ground and in Space
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Curriculum Overview Physics/Pre-AP 2018-2019 1St Nine Weeks
Curriculum Overview Physics/Pre-AP 2018-2019 1st Nine Weeks RESOURCES: Essential Physics (Ergopedia – online book) Physics Classroom http://www.physicsclassroom.com/ PHET Simulations https://phet.colorado.edu/ ONGOING TEKS: 1A, 1B, 2A, 2B, 2C, 2D, 2F, 2G, 2H, 2I, 2J,3E 1) SAFETY TEKS 1A, 1B Vocabulary Fume hood, fire blanket, fire extinguisher, goggle sanitizer, eye wash, safety shower, impact goggles, chemical safety goggles, fire exit, electrical safety cut off, apron, broken glass container, disposal alert, biological hazard, open flame alert, thermal safety, sharp object safety, fume safety, electrical safety, plant safety, animal safety, radioactive safety, clothing protection safety, fire safety, explosion safety, eye safety, poison safety, chemical safety Key Concepts The student will be able to determine if a situation in the physics lab is a safe practice and what appropriate safety equipment and safety warning signs may be needed in a physics lab. The student will be able to determine the proper disposal or recycling of materials in the physics lab. Essential Questions 1. How are safe practices in school, home or job applied? 2. What are the consequences for not using safety equipment or following safe practices? 2) SCIENCE OF PHYSICS: Glossary, Pages 35, 39 TEKS 2B, 2C Vocabulary Matter, energy, hypothesis, theory, objectivity, reproducibility, experiment, qualitative, quantitative, engineering, technology, science, pseudo-science, non-science Key Concepts The student will know that scientific hypotheses are tentative and testable statements that must be capable of being supported or not supported by observational evidence. The student will know that scientific theories are based on natural and physical phenomena and are capable of being tested by multiple independent researchers. -

LIGO: the Search for the Gravitational Wave Sky
LIGO: The Search for the Gravitational Wave Sky • Science • LIGO status • UO in LIGO R Frey Oct 2008 1 General Relativity • Grav ity as a “fic titious f orce” Gravity can be “removed” in a special ref. frame -- free fall • Einstein took this as a clue that gravity is really caused by the structure of spacetime • Postulates of General Relativity (Einstein ca. 1915): Equivalence of inertial and gravitational mass There is no physics experiment which can distinguish between a gravitational field and an accelerating reference frame • An elevator at rest in earth’s gravity (g=9.8 m/s2) • An elevator accelerating upward with a= 9. 8 m/s2 • What this means extends special relativity to non-zero acceleration GitGravity re-dibddescribed as curva ture o f space time • A test particle (or light) in free fall follows a “straight” geodesic R Frey Oct 2008 2 General Relativity (contd) SdiiSome predictions: Gravity influences both mass and energy • e.g. bending of light in regions with gravitational field • 1919 Eddington; Gravitational lensing: Einstein Cross Many small deviations from Newtonian gravity in “weak” fields • Gravitational “redshift” (e.g. clocks on satellites are faster) • Perihelion advance of mercury • Global Positioning System would not work without GR corrections “Strong” field effects 2 • Black holes; Rs = 2GM/c Spacetime structure of universe – evolution of spacetime from Big Bang • the “bi g s tre tc h” And gravitational radiation (gravitational waves) R Frey Oct 2008 3 GWs in GR R Frey Oct 2008 4 The 4 Forces of Nature -
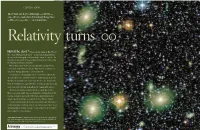
Albert Einstein's Key Breakthrough — Relativity
{ EINSTEIN’S CENTURY } Albert Einstein’s key breakthrough — relativity — came when he looked at a few ordinary things from a different perspective. /// BY RICHARD PANEK Relativity turns 1001 How’d he do it? This question has shadowed Albert Einstein for a century. Sometimes it’s rhetorical — an expression of amazement that one mind could so thoroughly and fundamentally reimagine the universe. And sometimes the question is literal — an inquiry into how Einstein arrived at his special and general theories of relativity. Einstein often echoed the first, awestruck form of the question when he referred to the mind’s workings in general. “What, precisely, is ‘thinking’?” he asked in his “Autobiographical Notes,” an essay from 1946. In somebody else’s autobiographical notes, even another scientist’s, this question might have been unusual. For Einstein, though, this type of question was typical. In numerous lectures and essays after he became famous as the father of relativity, Einstein began often with a meditation on how anyone could arrive at any subject, let alone an insight into the workings of the universe. An answer to the literal question has often been equally obscure. Since Einstein emerged as a public figure, a mythology has enshrouded him: the lone- ly genius sitting in the patent office in Bern, Switzerland, thinking his little thought experiments until one day, suddenly, he has a “Eureka!” moment. “Eureka!” moments young Einstein had, but they didn’t come from nowhere. He understood what scientific questions he was trying to answer, where they fit within philosophical traditions, and who else was asking them. -

Part 629 – Glossary of Landform and Geologic Terms
Title 430 – National Soil Survey Handbook Part 629 – Glossary of Landform and Geologic Terms Subpart A – General Information 629.0 Definition and Purpose This glossary provides the NCSS soil survey program, soil scientists, and natural resource specialists with landform, geologic, and related terms and their definitions to— (1) Improve soil landscape description with a standard, single source landform and geologic glossary. (2) Enhance geomorphic content and clarity of soil map unit descriptions by use of accurate, defined terms. (3) Establish consistent geomorphic term usage in soil science and the National Cooperative Soil Survey (NCSS). (4) Provide standard geomorphic definitions for databases and soil survey technical publications. (5) Train soil scientists and related professionals in soils as landscape and geomorphic entities. 629.1 Responsibilities This glossary serves as the official NCSS reference for landform, geologic, and related terms. The staff of the National Soil Survey Center, located in Lincoln, NE, is responsible for maintaining and updating this glossary. Soil Science Division staff and NCSS participants are encouraged to propose additions and changes to the glossary for use in pedon descriptions, soil map unit descriptions, and soil survey publications. The Glossary of Geology (GG, 2005) serves as a major source for many glossary terms. The American Geologic Institute (AGI) granted the USDA Natural Resources Conservation Service (formerly the Soil Conservation Service) permission (in letters dated September 11, 1985, and September 22, 1993) to use existing definitions. Sources of, and modifications to, original definitions are explained immediately below. 629.2 Definitions A. Reference Codes Sources from which definitions were taken, whole or in part, are identified by a code (e.g., GG) following each definition. -
Gravity and Projectile Motion
Do Now: What is gravity? Gravity Gravity is a force that acts between any 2 masses. Two factors affect the gravitational attraction between objects: mass and distance. What direction is Gravity? Earth’s gravity acts downward toward the center of the Earth. What is the difference between Mass and Weight? • Mass is a measure of the amount of matter (stuff) in an object. • Weight is a measure of the force of gravity on an object. • Your mass never changes,no matter where you are in the universe. But your weight will vary depending upon the force of gravity pulling down on you. Would you be heavier or lighter on the Moon? Gravity is a Law of Science • Newton realized that gravity acts everywhere in the universe, not just on Earth. • It is the force that makes an apple fall to the ground. • It is the force that keeps the moon orbiting around Earth. • It is the force that keeps all the planets in our solar system orbiting around the sun. What Newton realized is now called the Law of Universal Gravitation • The law of universal gravitation states that the force of gravity acts between all objects in the universe. • This means that any two objects in the universe, without exception, attract each other. • You are attracted not only to Earth but also to all the other objects around you. A cool thing about gravity is that it also acts through objects. Free Fall • When the only force acting on an object is gravity, the object is said to be in free fall. -

Free Fall Misconceptions: Results of a Graph Based Pre-Test of Sophomore Civil Engineering Students
European J of Physics Education Volume 5 Issue 3 2014 Montecinos Free Fall Misconceptions: Results of A Graph Based Pre-Test of Sophomore Civil Engineering Students Alicia M. Montecinos MDCE Group, Science Faculty Pontificia Universidad Católica de Valparaíso, Avenida Universidad 330 Curauma, Valparaíso, Chile [email protected] (Received: 16.05. 2014, Accepted: 13.08.2014) Abstract A partially unusual behaviour was found among 14 sophomore students of civil engineering who took a pre test for a free fall laboratory session, in the context of a general mechanics course. An analysis contemplating mathematics models and physics models consistency was made. In all cases, the students presented evidence favoring a correct free fall acceleration model, whilst their position component versus time, and velocity component versus time graphs revealed complex misconceptions both on the physical phenomenon and it’s implicit mathematics consistency. The last suggests an inability to make satisfactory connections through definitions between graphed variables. In other words, evidence strongly suggests that students are perfectly able to memorize the free fall acceleration model, whilst not understanding it’s significance at any level. This small study originated the develope and validation of a tutorial on free fall graphs for position, velocity and acceleration models, as part of a following cross-universities major project. Keywords: Misconception, Free-Fall, Graph, Model Introduction It is well known that free fall misconceptions are extremely common in all our students, whether they are majoring in science or not. Free fall can be addressed through energy, force or kinematics. A comprehensive paper review on the gravity force misconceptions was generously investigated by Kavanagh and Sneider (2007). -

Observing and Analyzing the Free Fall Motion of a Bouncing Ping-Pong Ball and Calculating the Free Fall Acceleration (Teacher’S Guide)
TM DataHub Free Fall: Observing and Analyzing the Free Fall Motion of a Bouncing Ping-Pong Ball and Calculating the Free Fall Acceleration (Teacher’s Guide) © 2012 WARD’S Science v.11/12 For technical assistance, All Rights Reserved call WARD’S at 1-800-962-2660 OVERVIEW Students will measure the variation in distance (motion) of a bouncing ping-pong ball when dropped from a height of 80 cm. They will analyze the data and calculate acceleration of gravity based on the empirical result to compare it with the information provided in the teacher background. MATERIALS NEEDED Ward’s DataHub USB connector cable* Ping-pong ball * – The USB connector cable is not needed if you are using a Bluetooth enabled device. NUMBER OF USES This demonstration can be performed repeatedly. © 2012 WARD’S Science. v.11/12 1 For technical assistance, All Rights Reserved Teacher’s Guide – Free Fall call WARD’S at 1-800-962-2660 FRAMEWORK FOR K-12 SCIENCE EDUCATION © 2012 * The Dimension I practices listed below are called out as bold words throughout the activity. Asking questions (for science) and defining Use mathematics and computational thinking problems (for engineering) Constructing explanations (for science) and designing Developing and using models solutions (for engineering) Practices Planning and carrying out investigations Engaging in argument from evidence Dimension 1 Analyzing and interpreting data Obtaining, evaluating, and communicating information Science and Engineering Science and Engineering Patterns Energy and matter: Flows, cycles, -

Mechanics Physics Translational Motions of a Mass Point Leaflets P1.3.5.1 Free Fall
LD Mechanics Physics Translational motions of a mass point Leaflets P1.3.5.1 Free fall Free fall: time measurement with the contact plate and the counter S Objects of the experiment g Measuring the falling times of a ball between the holding magnet and the contact plate for recording the path-time diagram point by point. g Confirming the proportionality between the falling distance and the square of the falling time. g Determining the acceleration of gravity. Principles When a body falls in the gravitational field of the earth from a height h to the ground, it experiences a constant acceleration g as long as the falling distance is small and friction can be neglected. This motion is called free fall. If the body starts at the time t0 = 0 with the initial velocity v0 = 0, the distance it cover in the time t is 1 h = ⋅g ⋅t2 (I). 2 Thus the free fall is an example of a uniformly accelerated motion. In the experiment, the free fall is investigated on a steel ball which is suspended from an electromagnet (see Fig. 1). Due to its gravitational force Fmg=⋅ (II) m: mass of the ball it falls downward in a uniformly accelerated motion as soon as the electromagnet is switched off. In this moment the electronic time measurement is started. Having covered the falling distance h, the ball hits a contact plate and stops the measurement at the falling time t. The measuring results for various falling distances are entered in a path-time diagram as pairs of values. -

Classical/Quantum Dynamics in a Uniform Gravitational Field: A
Classical/Quantum Dynamics in a Uniform Gravitational Field: A. Unobstructed Free Fall Nicholas Wheeler, Reed College Physics Department August 2002 Introduction. Every student of mechanics encounters discussion of the idealized one-dimensional dynamical systems 0:free particle F (x)=mx¨ with F (x)= −mg : particle in free fall −kx : harmonic oscillator at a very early point in his/her education, and with the first & last of those systems we are never done: they are—for reasons having little to do with their physical importance—workhorses of theoretical mechanics, traditionally employed to illustrated formal developments as they emerge, one after another. But—unaccountably—the motion of particles in uniform gravitational fields1 is seldom treated by methods more advanced than those accessible to beginning students. It is true that terrestrial gravitational forces are so relatively weak that they can—or could until recently—usually be dismissed as irrelevant to the phenomenology studied by physicists in their laboratories.2 But the free fall 1 It is to avoid that cumbersome phrase that I adopt the “free fall” locution, though technically free fall presumes neither uniformity nor constancy of the ambient gravitational field. If understood in the latter sense, “free fall” lies near the motivating heart of general relativity, which is certainly not a neglected subject. 2 There are exceptions: I am thinking of experiments done several decades ago where neutron diffraction in crystals was found to be sensitive to the value of g. And of experiments designed to determine whether antiparticles “fall up” (they don’t). 2 Classical/quantum motion in a uniform gravitational field: free fall problem—especially if construed quantum mechanically, with an eye to the relation between the quantum physics and classical physics—is itself a kind of laboratory, one in which striking clarity can be brought to a remarkable variety of formal issues. -

Gravitational Waves
Gravitational Waves Physics, Technology, Astronomy and Opportunities Unnikrishnan. C. S. Tata Institute of Fundamental Research Mumbai [email protected] www.tifr.res.in/~filab IIT-K, 2014 Gravitational Waves The Structure of Physics: Matter, Fields, Space and Time a= Fm/ and Principle of relativity Laws of Motion Physical Understanding Laws of Fundamental Forces F= − GMm/ r2 Conservation Laws (Constraints) Conservation of momentum. Energy etc… Four Fundamental Interactions and several fundamental particles Gravity, Electromagnetism, Weak interactions and sub-nuclear strong interactions. Electromagnetism Weak Interaction Gravity Strong Interaction IIT-K, 2014 Gravitational Waves Magnetic Field Electric Field Charges and Currents are fundamental, fields are ‘theoretical’. Current Magnetic field Electromagnetic waves need electric AND magnetic field for generation and propagation. ∂∂BE − =∇×E, µε =∇×B... Maxwell ∂∂tt00 Unobservables in Physics Fields, Wavefunction, Space and Time… IIT-K, 2014 Gravitational Waves GRAVITY, ITS FIELDS and THEIR WAVES IIT-K, 2014 Gravitational Waves F= − GMm/ r2 22 ag =−=− GMm// r m GM r a= Fm/ Independent of the mass of the falling body F= kQq/ r2 2 kQ q aem = kQq/ r m = 2 a= Fm/ rm Gravity seems to be a special interaction Inertia turns out to be identical to the gravitational charge – Equivalence Principle (physics of gravity identical to physics in accelerated frames) IIT-K, 2014 Gravitational Waves Universality of Free-Fall −−δ a δ a<1012 ms / 2 →< 10 13 a IIT-K, 2014 Gravitational Waves So, gravitational -

Experiment P007: Acceleration Due to Gravity (Free Fall Adapter)
Experiment P007: Acceleration due to Gravity (Free Fall Adapter) EQUIPMENT NEEDED Science Workshop™ Interface Clamp, right angle Base and support rod Free fall adapter Balls, 13 mm and 19 mm Meter stick (or metric tape measure) PURPOSE The purpose of this laboratory activity is to measure the acceleration of a falling object assuming that the only force acting on the object is the gravitational force. THEORY One equation describing the motion of a body starting from rest and undergoing constant acceleration can be expressed as: d=½at² where d is the distance the object has traveled from its starting point, a is the acceleration of the object, and t is the time elapsed since the motion began. Therefore, the acceleration is equal to the distance doubled, divided by the time squared, or: a=2d/t² In order to measure the acceleration caused by the gravitational force, several questions must be answered: Is the acceleration constant? If it is, then the distance the object falls will be proportional to the square of the elapsed time, as in the above equation. If the acceleration is constant, what is the value of the acceleration? Is it the same for all objects or does it vary with mass, size, or with some other property of the object? If it is not constant, how does it vary with time? PROCEDURE For this laboratory activity, the free fall adapter will measure the time of fall for steel balls of different sizes and mass. Using a meter stick, you will directly measure the height the ball falls.