HOW to CALCULATE MASS PROPERTIES (An Engineer's Practical Guide)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Effects of Balance Training on Balance Ability in Handball Players
EXERCISE AND QUALITY OF LIFE Research article Volume 4, No. 2, 2012, 15-22 UDC 796.322-051:796.012.266 THE EFFECTS OF BALANCE TRAINING ON BALANCE ABILITY IN HANDBALL PLAYERS Asimenia Gioftsidou , Paraskevi Malliou, Polina Sofokleous, George Pafis, Anastasia Beneka, and George Godolias Department of Physical Education and Sports Science, Democritus University of Thrace, Komotini, Greece Abstract The purpose of the present study was to investigate, the effectiveness of a balance training program in male professional handball players. Thirty professional handball players were randomly divided into experimental and control group. The experimental group (N=15), additional to the training program, followed an intervention balance program for 12 weeks. All subjects performed a static balance test (deviations from the horizontal plane). The results revealed that the 12-week balance training program improved (p<0.01) all balance performance indicators in the experimental group. Thus, a balance training program can increase balance ability of handball players, and could used as a prevent tool for lower limbs muscular skeletal injuries. Keywords: handball players, proprioception, balance training Introduction Handball is one of the most popular European team sports along with soccer, basketball and volleyball (Petersen et al., 2005). The sport medicine literature reports team sports participants, such as handball, soccer, hockey, or basketball players, reported an increased risk of traumatic events, especially to their lower extremity joints (Hawkins, and Fuller, 1999; Meeuwisse et al., 2003; Wedderkopp et al 1997; 1999). Injuries often occur in noncontact situations (Hawkins, and Fuller, 1999; Hertel et al., 2006) resulting in substantial and long-term functional impairments (Zech et al., 2009). -
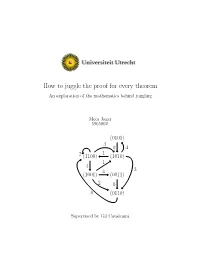
How to Juggle the Proof for Every Theorem an Exploration of the Mathematics Behind Juggling
How to juggle the proof for every theorem An exploration of the mathematics behind juggling Mees Jager 5965802 (0101) 3 0 4 1 2 (1100) (1010) 1 4 4 3 (1001) (0011) 2 0 0 (0110) Supervised by Gil Cavalcanti Contents 1 Abstract 2 2 Preface 4 3 Preliminaries 5 3.1 Conventions and notation . .5 3.2 A mathematical description of juggling . .5 4 Practical problems with mathematical answers 9 4.1 When is a sequence jugglable? . .9 4.2 How many balls? . 13 5 Answers only generate more questions 21 5.1 Changing juggling sequences . 21 5.2 Constructing all sequences with the Permutation Test . 23 5.3 The converse to the average theorem . 25 6 Mathematical problems with mathematical answers 35 6.1 Scramblable and magic sequences . 35 6.2 Orbits . 39 6.3 How many patterns? . 43 6.3.1 Preliminaries and a strategy . 43 6.3.2 Computing N(b; p).................... 47 6.3.3 Filtering out redundancies . 52 7 State diagrams 54 7.1 What are they? . 54 7.2 Grounded or Excited? . 58 7.3 Transitions . 59 7.3.1 The superior approach . 59 7.3.2 There is a preference . 62 7.3.3 Finding transitions using the flattening algorithm . 64 7.3.4 Transitions of minimal length . 69 7.4 Counting states, arrows and patterns . 75 7.5 Prime patterns . 81 1 8 Sometimes we do not find the answers 86 8.1 The converse average theorem . 86 8.2 Magic sequence construction . 87 8.3 finding transitions with flattening algorithm . -

Aircraft Weight and Balance Control
AC 120-27D DATE: 8/11/04 Initiated By: AFS-200/ AFS-300 ADVISORY CIRCULAR AIRCRAFT WEIGHT AND BALANCE CONTROL U.S. DEPARTMENT OF TRANSPORTATION Federal Aviation Administration Flight Standards Service Washington, D.C. 8/11/04 AC 120-27D TABLE OF CONTENTS Paragraph Page CHAPTER 1. INTRODUCTION ...................................................................................................1 100. What is the purpose of this advisory circular (AC)?.......................................................1 101. How is this AC organized? .............................................................................................1 102. What documents does this AC cancel?...........................................................................1 103. What should an operator consider while reading this AC?.............................................2 104. Who should use this AC?................................................................................................2 Table 1-1. Aircraft Cabin Size ................................................................................................2 105. Who can use standard average or segmented weights? ..................................................2 CHAPTER 2. AIRCRAFT WEIGHTS AND LOADING SCHEDULES......................................5 Section 1. Establishing Aircraft Weight .................................................................................... 5 200. How does an operator establish the initial weight of an aircraft?...................................5 201. How does an -
Annual Report 2020
ANNUAL REPORT 2020 HASKELL INDIAN NATIONS UNIVERSITY Table of Contents 03 President’s Welcome 04 Student Demographics: 2019-20 05 Student Demographics: 2019-20 (cont.) 06 Students of the Year: AICF & HINU 07 Class of 2015 Alumni Spotlight 08 Class of 2010 Alumni Spotlight 09 Class of 2010 Alumni Spotlight 10 Financial Aid: 2019-20 & Stewardship: 2019-20 11 Institutional Values—Goals Contact Information Haskell Indian Nations University 155 Indian Avenue Lawrence, KS 66046 (785) 749-8497 www.haskell.edu Office of the President (785) 749-7497 Dr. Tamara Pfeiffer (Interim) [email protected] Vice-President of University Services (785) 749-8457 Tonia Salvini [email protected] Vice-President of Academics (785) 749-8494 Cheryl Chuckluck (Interim) [email protected] Office of Admissions (785) 749-8456 Dorothy Stites [email protected] Office of the Registrar (785) 749-8440 Lou Hara [email protected] Financial Aid Office (785) 830-2702 Carlene Morris [email protected] Athletics Department (785) 749-8459 Gary Tanner (Interim) [email protected] Facilities Management (785) 830-2784 Karla Van Noy (Interim) [email protected] 2019-2020: Unexpected challenges Dr. Ronald Graham, President Eastern Shawnee Tribe of Oklahoma To all our stakeholders, Among the unexpected challenges of the 2019-2020 academic year has been the challenge of finding words to adequately describe it. This has been a year like no other. The COVID-19 pandemic reinforced the impact of our individual actions on those around us. In response, we renewed our commitment as a University to taking personal responsibility for our actions to ensure the health and well-being of others. -

The Evolution of Earth Gravitational Models Used in Astrodynamics
JEROME R. VETTER THE EVOLUTION OF EARTH GRAVITATIONAL MODELS USED IN ASTRODYNAMICS Earth gravitational models derived from the earliest ground-based tracking systems used for Sputnik and the Transit Navy Navigation Satellite System have evolved to models that use data from the Joint United States-French Ocean Topography Experiment Satellite (Topex/Poseidon) and the Global Positioning System of satellites. This article summarizes the history of the tracking and instrumentation systems used, discusses the limitations and constraints of these systems, and reviews past and current techniques for estimating gravity and processing large batches of diverse data types. Current models continue to be improved; the latest model improvements and plans for future systems are discussed. Contemporary gravitational models used within the astrodynamics community are described, and their performance is compared numerically. The use of these models for solid Earth geophysics, space geophysics, oceanography, geology, and related Earth science disciplines becomes particularly attractive as the statistical confidence of the models improves and as the models are validated over certain spatial resolutions of the geodetic spectrum. INTRODUCTION Before the development of satellite technology, the Earth orbit. Of these, five were still orbiting the Earth techniques used to observe the Earth's gravitational field when the satellites of the Transit Navy Navigational Sat were restricted to terrestrial gravimetry. Measurements of ellite System (NNSS) were launched starting in 1960. The gravity were adequate only over sparse areas of the Sputniks were all launched into near-critical orbit incli world. Moreover, because gravity profiles over the nations of about 65°. (The critical inclination is defined oceans were inadequate, the gravity field could not be as that inclination, 1= 63 °26', where gravitational pertur meaningfully estimated. -

In-Jest-Study-Guide
with Nels Ross “The Inspirational Oddball” . Study Guide ABOUT THE PRESENTER Nels Ross is an acclaimed performer and speaker who has won the hearts of international audiences. Applying his diverse background in performing arts and education, Nels works solo and with others to present school assemblies and programs which blend physical theater, variety arts, humor, and inspiration… All “in jest,” or in fun! ABOUT THE PROGRAM In Jest school assemblies and programs are based on the underlying principle that every person has value. Whether highlighting character, healthy choices, science & math, reading, or another theme, Nels employs physical theater and participation to engage the audience, juggling and other variety arts to teach the concepts, and humor to make it both fun and memorable. GOALS AND OBJECTIVES This program will enhance awareness and appreciation of physical theater and variety arts. In addition, the activities below provide connections to learning standards and the chosen theme. (What theme? Ask your artsineducation or assembly coordinator which specific program is coming to your school, and see InJest.com/schoolassemblyprograms for the latest description.) GETTING READY FOR THE PROGRAM ● Arrange for a clean, well lit SPACE, adjusting lights in advance as needed. Nels brings his own sound system, and requests ACCESS 4560 minutes before & after for set up & take down. ● Make announcements the day before to remind students and staff. For example: “Tomorrow we will have an exciting program with Nels Ross from In Jest. Be prepared to enjoy humor, juggling, and stunts in this uplifting celebration!” ● Discuss things which students might see and terms which they might not know: Physical Theater.. -

HISTORY and STAGE METHOD of JUGGLING with HULA HOOPS Oleksandra Sobolieva Kyiv Municipal Academy of Circus and Variety Arts, Kiev, Ukraine
INNOVATIVE SOLUTIONS IN MODERN SCIENCE № 2(11), 2017 UDC 792 (792.7) HISTORY AND STAGE METHOD OF JUGGLING WITH HULA HOOPS Oleksandra Sobolieva Kyiv Municipal Academy of Circus and Variety Arts, Kiev, Ukraine Research the methods of teaching juggling tricks by the big and small hula hoops, due to rising demand for hula hoops in recent years. Hula hoops acquire much popularity both abroad and in Ukraine, and are used not only in school, gymnastics and emotional pleasure, but also in a circus and juggling sports. Also highlights the main directions in the juggling with their features and how the juggling acts itself directly on human health. Also will be examined where this fascinating art form came to us, how it developed, and what kinds acquired in the present. Keywords: hula hoops, juggling, "track", stage technique, white substance, "helicopter". Problem definition and analysis of researches. Today juggling reached incredible development. There is no country where people would not be interested in juggling. There are a lot of conventions and juggling competitions, where people come from all over the world and share experiences with each other. But it should be noted, that there aren’t so much professional juggling schools. And if we talk about juggling by hula hoops, we can admit that there aren’t so much real experts in this field. Peter Bon, Tony Buzan in collaboration with Michael J. Gelb, Luke Burridge, Alexander Kiss, Paul Koshel and many others have written about all kinds of juggling, but left unattended hula hoops juggling. That is why in this article will be examples of author’s tricks with large and small hula hoops with a detailed description. -

Siteswap-Notes-Extended-Ltr 2014.Pages
Understanding Two-handed Siteswap http://kingstonjugglers.club/r/siteswap.pdf Greg Phillips, [email protected] Overview Alternating throws Siteswap is a set of notations for describing a key feature Many juggling patterns are based on alternating right- of juggling patterns: the order in which objects are hand and lef-hand throws. We describe these using thrown and re-thrown. For an object to be re-thrown asynchronous siteswap notation. later rather than earlier, it needs to be out of the hand longer. In regular toss juggling, more time out of the A1 The right and lef hands throw on alternate beats. hand means a higher throw. Any pattern with different throw heights is at least partly described by siteswap. Rules C2 and A1 together require that odd-numbered Siteswap can be used for any number of “hands”. In this throws end up in the opposite hand, while even guide we’ll consider only two-handed siteswap; numbers stay in the same hand. Here are a few however, everything here extends to siteswap with asynchronous siteswap examples: three, four or more hands with just minor tweaks. 3 a three-object cascade Core rules (for all patterns) 522 also a three-object cascade C1 Imagine a metronome ticking at some constant rate. 42 two juggled in one hand, a held object in the other Each tick is called a “beat.” 40 two juggled in one hand, the other hand empty C2 Indicate each thrown object by a number that tells 330 a three-object cascade with a hole (two objects) us how many beats later that object must be back in 71 a four-object asynchronous shower a hand and ready to re-throw. -

Using Tagteach to Train Baton Twirling Skills in Older Adults Sarah Elizabeth Hester University of South Florida, [email protected]
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School January 2015 Keeping Up with the Grandkids: Using TAGteach to Train Baton Twirling Skills in Older Adults Sarah Elizabeth Hester University of South Florida, [email protected] Follow this and additional works at: http://scholarcommons.usf.edu/etd Part of the Behavioral Disciplines and Activities Commons, and the Other Medical Specialties Commons Scholar Commons Citation Hester, Sarah Elizabeth, "Keeping Up with the Grandkids: Using TAGteach to Train Baton Twirling Skills in Older Adults" (2015). Graduate Theses and Dissertations. http://scholarcommons.usf.edu/etd/5702 This Thesis is brought to you for free and open access by the Graduate School at Scholar Commons. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. Keeping Up with the Grandkids: Using TAGteachTM to Train Baton Twirling Skills in Older Adults by Sarah E. Hester A thesis submitted in partial fulfillment of the requirements for the degree of Master of Arts with a concentration in Applied Behavior Analysis Department of Child and Family Studies College of Behavioral and Community Sciences University of South Florida Major Professor: Sarah Bloom, Ph.D. Andrew Samaha, Ph.D. Kimberly Crosland, Ph.D. Date of Approval: July 1, 2015 Keywords: feedback, auditory stimulus, acoustical guidance, physical activity, behavior analysis Copyright © 2015, Sarah E. Hester Acknowledgments I would like to acknowledge and thank all the people who helped make this project possible. First, I would like to give a hearty thanks to my entire thesis committee for all their expertise and guidance throughout this process. -

Facilitator – February/March 2012 : Sharpen Your Tools
Facilitator – February/March 2012 : Sharpen Your Tools http://onlinedigitalpublishing.com/display_article.php?id=974449 X Facilitator — February/March 2012 Change Language: Text Size A | A | A All translations are provided for your convenience by the Google Translate Tool. The publishers, authors, and digital providers of this publication are not responsible for any errors that may occur during the translation process. If you intend on relying upon the translation for any purpose other than your own casual enjoyment, you should have this publication professionally translated at your own expense. Sharpen Your Tools Jon Wee Staying in Balance Before everything you’re balancing comes crashing down around you, follow some tips gleaned from the world of juggling If you often feel like a juggler, trying to balance all the different responsibilities of your life, you’re not alone. Between work demands, home and family obligations, interests and hobbies, community involvement and personal/professional development pursuits, many people feel they have too many balls in the air at once. And unfortunately, the situation is only getting worse. With the proliferation of PDAs, cell phones and other technologies, we often have no escape from the barrage of intrusions: clients calling after hours, the boss assigning yet another project and friends needing help. People expect us to always be reachable at a moment’s notice. For many, the very tools that were supposed to make our lives easier have only made us more stressed. How bad is the problem? A recent study of more than 50,000 employees from a variety of manufacturing and service organizations found that two out of every five employees are dissatisfied with the balance between their work and their personal lives. -

Understanding Siteswap Juggling Patterns a Guide for the Perplexed by Greg Phillips, [email protected]
Understanding Siteswap Juggling Patterns A guide for the perplexed by Greg Phillips, [email protected] Core rules (for all patterns) Synchronous siteswap (simultaneous throws) C1 We imagine a metronome ticking at some constant rate. Some juggling patterns involve both hands throwing at the Each tick is called a “beat.” same time. We describe these using synchronous siteswap. C2 We indicate each thrown object by a number that tells us how many beats later that object must be back in a hand S1 The right and left hands throw at the same time (which and ready to re-throw. counts as two throws) on every second beat. We group C3 We indicate a sequence of throws by a string of numbers the simultaneous throws in parentheses and separate the (plus punctuation and the letter x). We imagine these hands with commas. strings repeat indefinitely, making 531 equivalent to S2 We indicate throws that cross from hand to hand with an …531531531… So are 315 and 153 — can you see x (for ‘xing’). why? C4 The sum of all throw numbers in a siteswap string divided Rules C2 and S1 taken together demand that there be only by the number of throws in the string gives the number of even numbers in valid synchronous siteswaps. Can you see objects in the pattern. This must always be a whole why? The x notation of rule S2 is required to distinguish number. 531 is a three-ball pattern, since (5+3+1)/3 patterns like (4,4) (synchronous fountain) from (4x,4x) equals three; however, 532 cannot be juggled since (synchronous crossing). -

Student Academic Learning Services Pounds Mass and Pounds Force
Student Academic Learning Services Page 1 of 3 Pounds Mass and Pounds Force One of the greatest sources of confusion in the Imperial (or U.S. Customary) system of measurement is that both mass and force are measured using the same unit, the pound. The differentiate between the two, we call one type of pound the pound-mass (lbm) and the other the pound-force (lbf). Distinguishing between the two, and knowing how to use them in calculations is very important in using and understanding the Imperial system. Definition of Mass The concept of mass is a little difficult to pin down, but basically you can think of the mass of an object as the amount of matter contain within it. In the S.I., mass is measured in kilograms. The kilogram is a fundamental unit of measure that does not come from any other unit of measure.1 Definition of the Pound-mass The pound mass (abbreviated as lbm or just lb) is also a fundamental unit within the Imperial system. It is equal to exactly 0.45359237 kilograms by definition. 1 lbm 0.45359237 kg Definition of Force≡ Force is an action exerted upon an object that causes it to accelerate. In the S.I., force is measured using Newtons. A Newton is defined as the force required to accelerate a 1 kg object at a rate of 1 m/s2. 1 N 1 kg m/s2 Definition of ≡the Pound∙ -force The pound-force (lbf) is defined a bit differently than the Newton. One pound-force is defined as the force required to accelerate an object with a mass of 1 pound-mass at a rate of 32.174 ft/s2.