Rafai Ablamowicz William E. Baylis Thomas Branson Pertti Lounesto Lan Porteous Johnryan J.M
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Math 317: Linear Algebra Notes and Problems
Math 317: Linear Algebra Notes and Problems Nicholas Long SFASU Contents Introduction iv 1 Efficiently Solving Systems of Linear Equations and Matrix Op- erations 1 1.1 Warmup Problems . .1 1.2 Solving Linear Systems . .3 1.2.1 Geometric Interpretation of a Solution Set . .9 1.3 Vector and Matrix Equations . 11 1.4 Solution Sets of Linear Systems . 15 1.5 Applications . 18 1.6 Matrix operations . 20 1.6.1 Special Types of Matrices . 21 1.6.2 Matrix Multiplication . 22 2 Vector Spaces 25 2.1 Subspaces . 28 2.2 Span . 29 2.3 Linear Independence . 31 2.4 Linear Transformations . 33 2.5 Applications . 38 3 Connecting Ideas 40 3.1 Basis and Dimension . 40 3.1.1 rank and nullity . 41 3.1.2 Coordinate Vectors relative to a basis . 42 3.2 Invertible Matrices . 44 3.2.1 Elementary Matrices . 44 ii CONTENTS iii 3.2.2 Computing Inverses . 45 3.2.3 Invertible Matrix Theorem . 46 3.3 Invertible Linear Transformations . 47 3.4 LU factorization of matrices . 48 3.5 Determinants . 49 3.5.1 Computing Determinants . 49 3.5.2 Properties of Determinants . 51 3.6 Eigenvalues and Eigenvectors . 52 3.6.1 Diagonalizability . 55 3.6.2 Eigenvalues and Eigenvectors of Linear Transfor- mations . 56 4 Inner Product Spaces 58 4.1 Inner Products . 58 4.2 Orthogonal Complements . 59 4.3 QR Decompositions . 59 Nicholas Long Introduction In this course you will learn about linear algebra by solving a carefully designed sequence of problems. It is important that you understand every problem and proof. -

Notes, Since the Quadratic Form Associated with an Inner Product (Kuk2 = Hu, Ui) Must Be Positive Def- Inite
Bindel, Spring 2012 Intro to Scientific Computing (CS 3220) Week 3: Wednesday, Feb 8 Spaces and bases 1 n I have two favorite vector spaces : R and the space Pd of polynomials of degree at most d. For Rn, we have a canonical basis: n R = spanfe1; e2; : : : ; eng; where ek is the kth column of the identity matrix. This basis is frequently convenient both for analysis and for computation. For Pd, an obvious- seeming choice of basis is the power basis: 2 d Pd = spanf1; x; x ; : : : ; x g: But this obvious-looking choice turns out to often be terrible for computation. Why? The short version is that powers of x aren't all that strongly linearly dependent, but we need to develop some more concepts before that short description will make much sense. The range space of a matrix or a linear map A is just the set of vectors y that can be written in the form y = Ax. If A is full (column) rank, then the columns of A are linearly independent, and they form a basis for the range space. Otherwise, A is rank-deficient, and there is a non-trivial null space consisting of vectors x such that Ax = 0. Rank deficiency is a delicate property2. For example, consider the matrix 1 1 A = : 1 1 This matrix is rank deficient, but the matrix 1 + δ 1 A^ = : 1 1 is not rank deficient for any δ 6= 0. Technically, the columns of A^ form a basis for R2, but we should be disturbed by the fact that A^ is so close to a singular matrix. -

26-2 Spacetime and the Spacetime Interval We Usually Think of Time and Space As Being Quite Different from One Another
Answer to Essential Question 26.1: (a) The obvious answer is that you are at rest. However, the question really only makes sense when we ask what the speed is measured with respect to. Typically, we measure our speed with respect to the Earth’s surface. If you answer this question while traveling on a plane, for instance, you might say that your speed is 500 km/h. Even then, however, you would be justified in saying that your speed is zero, because you are probably at rest with respect to the plane. (b) Your speed with respect to a point on the Earth’s axis depends on your latitude. At the latitude of New York City (40.8° north) , for instance, you travel in a circular path of radius equal to the radius of the Earth (6380 km) multiplied by the cosine of the latitude, which is 4830 km. You travel once around this circle in 24 hours, for a speed of 350 m/s (at a latitude of 40.8° north, at least). (c) The radius of the Earth’s orbit is 150 million km. The Earth travels once around this orbit in a year, corresponding to an orbital speed of 3 ! 104 m/s. This sounds like a high speed, but it is too small to see an appreciable effect from relativity. 26-2 Spacetime and the Spacetime Interval We usually think of time and space as being quite different from one another. In relativity, however, we link time and space by giving them the same units, drawing what are called spacetime diagrams, and plotting trajectories of objects through spacetime. -

Thermodynamics of Spacetime: the Einstein Equation of State
gr-qc/9504004 UMDGR-95-114 Thermodynamics of Spacetime: The Einstein Equation of State Ted Jacobson Department of Physics, University of Maryland College Park, MD 20742-4111, USA [email protected] Abstract The Einstein equation is derived from the proportionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat, entropy, and temperature. The key idea is to demand that this relation hold for all the local Rindler causal horizons through each spacetime point, with δQ and T interpreted as the energy flux and Unruh temperature seen by an accelerated observer just inside the horizon. This requires that gravitational lensing by matter energy distorts the causal structure of spacetime in just such a way that the Einstein equation holds. Viewed in this way, the Einstein equation is an equation of state. This perspective suggests that it may be no more appropriate to canonically quantize the Einstein equation than it would be to quantize the wave equation for sound in air. arXiv:gr-qc/9504004v2 6 Jun 1995 The four laws of black hole mechanics, which are analogous to those of thermodynamics, were originally derived from the classical Einstein equation[1]. With the discovery of the quantum Hawking radiation[2], it became clear that the analogy is in fact an identity. How did classical General Relativity know that horizon area would turn out to be a form of entropy, and that surface gravity is a temperature? In this letter I will answer that question by turning the logic around and deriving the Einstein equation from the propor- tionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat Q, entropy S, and temperature T . -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Linear Algebra) 2
MATH 680 Computation Intensive Statistics December 3, 2018 Matrix Basics Contents 1 Rank (linear algebra) 2 1.1 Proofs that column rank = row rank . .2 1.2 Properties . .4 2 Kernel (linear algebra) 5 2.1 Properties . .6 2.2 Illustration . .9 3 Matrix Norm 12 3.1 Matrix norms induced by vector norms . 12 3.2 Entrywise matrix norms . 14 3.3 Schatten norms . 18 1 1 RANK (LINEAR ALGEBRA) 2 4 Projection 19 4.1 Properties and classification . 20 4.2 Orthogonal projections . 21 1 Rank (linear algebra) In linear algebra, the rank of a matrix A is the dimension of the vector space generated (or spanned) by its columns. This corresponds to the maximal number of linearly independent columns of A. This, in turn, is identical to the dimension of the space spanned by its rows. The column rank of A is the dimension of the column space of A, while the row rank of A is the dimension of the row space of A. A fundamental result in linear algebra is that the column rank and the row rank are always equal. 1.1 Proofs that column rank = row rank Let A be an m × n matrix with entries in the real numbers whose row rank is r. There- fore, the dimension of the row space of A is r. Let x1; x2; : : : ; xr be a basis of the row space of A. We claim that the vectors Ax1; Ax2; : : : ; Axr are linearly independent. To see why, consider a linear homogeneous relation involving these vectors with scalar coefficients c1; c2; : : : ; cr : 0 = c1Ax1 + c2Ax2 + ··· + crAxr = A(c1x1 + c2x2 + ··· + crxr) = Av; 1 RANK (LINEAR ALGEBRA) 3 where v = c1x1 + c2x2 + ··· + crxr: We make two observations: 1. -

Inner Products and Orthogonality
Advanced Linear Algebra – Week 5 Inner Products and Orthogonality This week we will learn about: • Inner products (and the dot product again), • The norm induced by the inner product, • The Cauchy–Schwarz and triangle inequalities, and • Orthogonality. Extra reading and watching: • Sections 1.3.4 and 1.4.1 in the textbook • Lecture videos 17, 18, 19, 20, 21, and 22 on YouTube • Inner product space at Wikipedia • Cauchy–Schwarz inequality at Wikipedia • Gram–Schmidt process at Wikipedia Extra textbook problems: ? 1.3.3, 1.3.4, 1.4.1 ?? 1.3.9, 1.3.10, 1.3.12, 1.3.13, 1.4.2, 1.4.5(a,d) ??? 1.3.11, 1.3.14, 1.3.15, 1.3.25, 1.4.16 A 1.3.18 1 Advanced Linear Algebra – Week 5 2 There are many times when we would like to be able to talk about the angle between vectors in a vector space V, and in particular orthogonality of vectors, just like we did in Rn in the previous course. This requires us to have a generalization of the dot product to arbitrary vector spaces. Definition 5.1 — Inner Product Suppose that F = R or F = C, and V is a vector space over F. Then an inner product on V is a function h·, ·i : V × V → F such that the following three properties hold for all c ∈ F and all v, w, x ∈ V: a) hv, wi = hw, vi (conjugate symmetry) b) hv, w + cxi = hv, wi + chv, xi (linearity in 2nd entry) c) hv, vi ≥ 0, with equality if and only if v = 0. -

Lecture 17 Relativity A2020 Prof. Tom Megeath What Are the Major Ideas
4/1/10 Lecture 17 Relativity What are the major ideas of A2020 Prof. Tom Megeath special relativity? Einstein in 1921 (born 1879 - died 1955) Einstein’s Theories of Relativity Key Ideas of Special Relativity • Special Theory of Relativity (1905) • No material object can travel faster than light – Usual notions of space and time must be • If you observe something moving near light speed: revised for speeds approaching light speed (c) – Its time slows down – Its length contracts in direction of motion – E = mc2 – Its mass increases • Whether or not two events are simultaneous depends on • General Theory of Relativity (1915) your perspective – Expands the ideas of special theory to include a surprising new view of gravity 1 4/1/10 Inertial Reference Frames Galilean Relativity Imagine two spaceships passing. The astronaut on each spaceship thinks that he is stationary and that the other spaceship is moving. http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ Which one is right? Both. ClassMechanics/Relativity/Relativity.html Each one is an inertial reference frame. Any non-rotating reference frame is an inertial reference frame (space shuttle, space station). Each reference Speed limit sign posted on spacestation. frame is equally valid. How fast is that man moving? In contrast, you can tell if a The Solar System is orbiting our Galaxy at reference frame is rotating. 220 km/s. Do you feel this? Absolute Time Absolutes of Relativity 1. The laws of nature are the same for everyone In the Newtonian universe, time is absolute. Thus, for any two people, reference frames, planets, etc, 2. -
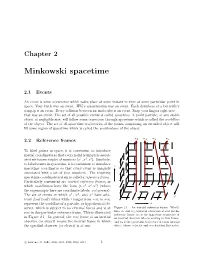
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Approximating Functions in Clifford
Approximating Clifford functions Approximating functions in Clifford algebras: What to do with negative eigenvalues? (Long version) Paul Leopardi Mathematical Sciences Institute, Australian National University. For presentation at AGACSE 2010 Amsterdam. June 2010 Approximating Clifford functions Motivation Functions in Clifford algebras are a special case of matrix functions, as can be seen via representation theory. The square root and logarithm functions, in particular, pose problems for the author of a general purpose library of Clifford algebra functions. This is partly because the principal square root and logarithm of a matrix do not exist for a matrix containing a negative eigenvalue. (Higham 2008) Approximating Clifford functions Problems 1. Define the square root and logarithm of a multivector in the case where the matrix representation has negative eigenvalues. 2. Predict or detect negative eigenvalues. Approximating Clifford functions Topics I Clifford algebras I Clifford algebras and transformations I Functions in Clifford algebras I Dealing with negative eigenvalues I Predicting negative eigenvalues? I Detecting negative eigenvalues Approximating Clifford functions Clifford algebras The exterior product n I For x and y in R , making angle θ , the exterior (outer) product x ^ y is a directed area in the plane of x and y : jx ^ yj = kxk kyk sin θ y - ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ x ¡ x ^ y ¡ ¡ y ^ x ¡ ¡ ¡ ¡ ¡ x ¡ ¡ ¡ ¡ ¡ θ ¡ ¡ θ -¡ y (Grassmann 1844; Lasenby and Doran 1999; Lounesto 1997) Approximating Clifford functions Clifford algebras Properties of -

Inner Product Spaces
Part VI Inner Product Spaces 475 Section 27 The Dot Product in Rn Focus Questions By the end of this section, you should be able to give precise and thorough answers to the questions listed below. You may want to keep these questions in mind to focus your thoughts as you complete the section. What is the dot product of two vectors? Under what conditions is the dot • product defined? How do we find the angle between two nonzero vectors in Rn? • How does the dot product tell us if two vectors are orthogonal? • How do we define the length of a vector in any dimension and how can the • dot product be used to calculate the length? How do we define the distance between two vectors? • What is the orthogonal projection of a vector u in the direction of the vector • v and how do we find it? What is the orthogonal complement of a subspace W of Rn? • Application: Hidden Figures in Computer Graphics In video games, the speed at which a computer can render changing graphics views is vitally im- portant. To increase a computer’s ability to render a scene, programs often try to identify those parts of the images a viewer could see and those parts the viewer could not see. For example, in a scene involving buildings, the viewer could not see any images blocked by a solid building. In the mathematical world, this can be visualized by graphing surfaces. In Figure 27.1 we see a crude image of a house made up of small polygons (this is how programs generally represent surfaces). -

A Geometric Introduction to Spacetime and Special Relativity
A GEOMETRIC INTRODUCTION TO SPACETIME AND SPECIAL RELATIVITY. WILLIAM K. ZIEMER Abstract. A narrative of special relativity meant for graduate students in mathematics or physics. The presentation builds upon the geometry of space- time; not the explicit axioms of Einstein, which are consequences of the geom- etry. 1. Introduction Einstein was deeply intuitive, and used many thought experiments to derive the behavior of relativity. Most introductions to special relativity follow this path; taking the reader down the same road Einstein travelled, using his axioms and modifying Newtonian physics. The problem with this approach is that the reader falls into the same pits that Einstein fell into. There is a large difference in the way Einstein approached relativity in 1905 versus 1912. I will use the 1912 version, a geometric spacetime approach, where the differences between Newtonian physics and relativity are encoded into the geometry of how space and time are modeled. I believe that understanding the differences in the underlying geometries gives a more direct path to understanding relativity. Comparing Newtonian physics with relativity (the physics of Einstein), there is essentially one difference in their basic axioms, but they have far-reaching im- plications in how the theories describe the rules by which the world works. The difference is the treatment of time. The question, \Which is farther away from you: a ball 1 foot away from your hand right now, or a ball that is in your hand 1 minute from now?" has no answer in Newtonian physics, since there is no mechanism for contrasting spatial distance with temporal distance.