Filter Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Generalizing Sampling Theory for Time-Varying Nyquist Rates Using Self-Adjoint Extensions of Symmetric Operators with Deficiency Indices (1,1) in Hilbert Spaces
Generalizing Sampling Theory for Time-Varying Nyquist Rates using Self-Adjoint Extensions of Symmetric Operators with Deficiency Indices (1,1) in Hilbert Spaces by Yufang Hao A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Doctor of Philosophy in Applied Mathematics Waterloo, Ontario, Canada, 2011 c Yufang Hao 2011 I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract Sampling theory studies the equivalence between continuous and discrete representa- tions of information. This equivalence is ubiquitously used in communication engineering and signal processing. For example, it allows engineers to store continuous signals as discrete data on digital media. The classical sampling theorem, also known as the theorem of Whittaker-Shannon- Kotel'nikov, enables one to perfectly and stably reconstruct continuous signals with a con- stant bandwidth from their discrete samples at a constant Nyquist rate. The Nyquist rate depends on the bandwidth of the signals, namely, the frequency upper bound. Intuitively, a signal's `information density' and ‘effective bandwidth' should vary in time. Adjusting the sampling rate accordingly should improve the sampling efficiency and information storage. While this old idea has been pursued in numerous publications, fundamental problems have remained: How can a reliable concept of time-varying bandwidth been defined? How can samples taken at a time-varying Nyquist rate lead to perfect and stable reconstruction of the continuous signals? This thesis develops a new non-Fourier generalized sampling theory which takes samples only as often as necessary at a time-varying Nyquist rate and maintains the ability to perfectly reconstruct the signals. -

Fourier Analysis and Sampling Theory
Reading Required: Shirley, Ch. 9 Recommended: Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Fourier analysis and Don P. Mitchell and Arun N. Netravali, “Reconstruction Filters in Computer Computer sampling theory Graphics ,” Computer Graphics, (Proceedings of SIGGRAPH 88). 22 (4), pp. 221-228, 1988. Brian Curless CSE 557 Fall 2009 1 2 What is an image? Images as functions We can think of an image as a function, f, from R2 to R: f(x,y) gives the intensity of a channel at position (x,y) Realistically, we expect the image only to be defined over a rectangle, with a finite range: • f: [a,b]x[c,d] Æ [0,1] A color image is just three functions pasted together. We can write this as a “vector-valued” function: ⎡⎤rxy(, ) f (,xy )= ⎢⎥ gxy (, ) ⎢⎥ ⎣⎦⎢⎥bxy(, ) We’ll focus in grayscale (scalar-valued) images for now. 3 4 Digital images Motivation: filtering and resizing In computer graphics, we usually create or operate What if we now want to: on digital (discrete)images: smooth an image? Sample the space on a regular grid sharpen an image? Quantize each sample (round to nearest enlarge an image? integer) shrink an image? If our samples are Δ apart, we can write this as: In this lecture, we will explore the mathematical underpinnings of these operations. f [n ,m] = Quantize{ f (n Δ, m Δ) } 5 6 Convolution Convolution in 2D One of the most common methods for filtering a In two dimensions, convolution becomes: function, e.g., for smoothing or sharpening, is called convolution. -

Filter Effects and Filter Artifacts in the Analysis of Electrophysiological Data
GENERAL COMMENTARY published: 09 July 2012 doi: 10.3389/fpsyg.2012.00233 Filter effects and filter artifacts in the analysis of electrophysiological data Andreas Widmann* and Erich Schröger Institute of Psychology, University of Leipzig, Leipzig, Germany *Correspondence: [email protected] Edited by: Guillaume A. Rousselet, University of Glasgow, UK Reviewed by: Rufin VanRullen, Centre de Recherche Cerveau et Cognition, France Lucas C. Parra, City College of New York, USA A commentary on unity gain at DC (the step response never FILTER EFFECTS VS. FILTER ARTIFACTS returns to one). These artifacts are due to a We also recommend to distinguish between Four conceptual fallacies in mapping the known misconception in FIR filter design in filter effects, that is, the obligatory effects time course of recognition EEGLAB1. The artifacts are further ampli- any filter with equivalent properties – cutoff by VanRullen, R. (2011). Front. Psychol. fied by filtering twice, forward and back- frequency, roll-off, ripple, and attenuation 2:365. doi: 10.3389/fpsyg.2011.00365 ward, to achieve zero-phase. – would have on the data (e.g., smoothing With more appropriate filters the under- of transients as demonstrated by the filter’s Does filtering preclude us from studying estimation of signal onset latency due to step response), and filter artifacts, that is, ERP time-courses? the smoothing effect of low-pass filtering effects which can be minimized by selection by Rousselet, G. A. (2012). Front. Psychol. could be narrowed down to about 4–12 ms of filter type and parameters (e.g., ringing). 3:131. doi: 10.3389/fpsyg.2012.00131 in the simulated dataset (see Figure 1 and Appendix for a simulation), that is, about an CAUSAL FILTERING In a recent review, VanRullen (2011) con- order of magnitude smaller than assumed. -
Digital Signal Processing Tom Davinson
First SPES School on Experimental Techniques with Radioactive Beams INFN LNS Catania – November 2011 Experimental Challenges Lecture 4: Digital Signal Processing Tom Davinson School of Physics & Astronomy N I VE R U S I E T H Y T O H F G E D R I N B U Objectives & Outline Practical introduction to DSP concepts and techniques Emphasis on nuclear physics applications I intend to keep it simple … … even if it’s not … … I don’t intend to teach you VHDL! • Sampling Theorem • Aliasing • Filtering? Shaping? What’s the difference? … and why do we do it? • Digital signal processing • Digital filters semi-gaussian, moving window deconvolution • Hardware • To DSP or not to DSP? • Summary • Further reading Sampling Sampling Periodic measurement of analogue input signal by ADC Sampling Theorem An analogue input signal limited to a bandwidth fBW can be reproduced from its samples with no loss of information if it is regularly sampled at a frequency fs 2fBW The sampling frequency fs= 2fBW is called the Nyquist frequency (rate) Note: in practice the sampling frequency is usually >5x the signal bandwidth Aliasing: the problem Continuous, sinusoidal signal frequency f sampled at frequency fs (fs < f) Aliasing misrepresents the frequency as a lower frequency f < 0.5fs Aliasing: the solution Use low-pass filter to restrict bandwidth of input signal to satisfy Nyquist criterion fs 2fBW Digital Signal Processing D…igi wtahl aSt ignneaxtl? Processing Digital signal processing is the software controlled processing of sequential data derived from a digitised analogue signal. Some of the advantages of digital signal processing are: • functionality possible to implement functions which are difficult, impractical or impossible to achieve using hardware, e.g. -

Aliasing, Image Sampling and Reconstruction
https://youtu.be/yr3ngmRuGUc Recall: a pixel is a point… Aliasing, Image Sampling • It is NOT a box, disc or teeny wee light and Reconstruction • It has no dimension • It occupies no area • It can have a coordinate • More than a point, it is a SAMPLE Many of the slides are taken from Thomas Funkhouser course slides and the rest from various sources over the web… Image Sampling Imaging devices area sample. • An image is a 2D rectilinear array of samples • In video camera the CCD Quantization due to limited intensity resolution array is an area integral Sampling due to limited spatial and temporal resolution over a pixel. • The eye: photoreceptors Intensity, I Pixels are infinitely small point samples J. Liang, D. R. Williams and D. Miller, "Supernormal vision and high- resolution retinal imaging through adaptive optics," J. Opt. Soc. Am. A 14, 2884- 2892 (1997) 1 Aliasing Good Old Aliasing Reconstruction artefact Sampling and Reconstruction Sampling Reconstruction Slide © Rosalee Nerheim-Wolfe 2 Sources of Error Aliasing (in general) • Intensity quantization • In general: Artifacts due to under-sampling or poor reconstruction Not enough intensity resolution • Specifically, in graphics: Spatial aliasing • Spatial aliasing Temporal aliasing Not enough spatial resolution • Temporal aliasing Not enough temporal resolution Under-sampling Figure 14.17 FvDFH Sampling & Aliasing Spatial Aliasing • Artifacts due to limited spatial resolution • Real world is continuous • The computer world is discrete • Mapping a continuous function to a -

Analyze Bus Goals & Constraints
16: Windowed-Sinc Filters * Acknowledgment: This material is derived and adapted from “The Scientist and Engineer's Guide to Digital Signal processing”, Steven W. Smith WOO-CCI504-SCI-UoN 1 Windowed-sinc filter . Windowed-sinc filters are used to separate one band of frequencies from another. For this, they are very stable, consistent, and can deliver high performance levels. The exceptional frequency domain characteristics are obtained, however, at the expense of poor performance in the time domain, including excessive ripple and overshoot in the step response. When carried out by standard convolution, windowed-sinc filters are easy to program, but slow to execute. the FFT can be used to dramatically improve the computational speed of these filters. WOO-CCI504-SCI-UoN 2 Strategy of the Windowed-Sinc WOO-CCI504-SCI-UoN 3 Strategy of the Windowed-Sinc . the idea behind the windowed-sinc filter. [see Figure 16-1] . The frequency response of the ideal low-pass filter: . All frequencies below the cutoff frequency, fC, are passed with unity amplitude, while all higher frequencies are blocked. The passband is perfectly flat, the attenuation in the stopband is infinite, and the transition between the two is infinitesimally small. Taking the Inverse Fourier Transform of this ideal frequency response produces the ideal filter kernel (impulse response) which is the sinc function, given by: WOO-CCI504-SCI-UoN 4 Strategy of the Windowed-Sinc Figure 16-1 WOO-CCI504-SCI-UoN 5 Strategy of the Windowed-Sinc . Convolving an input signal with this (sinc) filter kernel should provides a perfect low-pass filter. Problem: the sinc function continues to both negative and positive infinity without dropping to zero amplitude. -
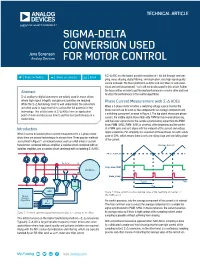
Sigma-Delta Conversion Used for Motor Control
TECHNICAL ARTICLE SIGMA-DELTA CONVERSION USED Jens Sorensen Analog Devices FOR MOTOR CONTROL A - ADC has the lowest possible resolution of 1 bit, but through oversam- Share on Twitter Share on LinkedIn Email Σ Δ | | | pling, noise shaping, digital filtering, and decimation, very high signal quality can be achieved. The theory behind Σ-Δ ADCs and sinc filters is well under- stood and well documented,1, 2 so it will not be discussed in this article. Rather, Abstract the focus will be on how to get the best performance in a motor drive and how to utilize the performance in the control algorithms. Ʃ-Δ analog-to-digital converters are widely used in motor drives where high signal integrity and galvanic isolation are required. Phase Current Measurement with Σ-Δ ADCs While the Σ-Δ technology itself is well understood, the converters When a 3-phase motor is fed by a switching voltage source inverter, the are often used in ways that fail to unlock the full potential of the phase current can be seen as two components: an average component and technology. This article looks at Σ-Δ ADCs from an application a switching component, as seen in Figure 2. The top signal shows one phase point of view and discusses how to get the best performance in a current, the middle signal shows high-side PWM for the inverter phase-leg, motor drive. and the lower signal shows the sample synchronizing signal from the PWM timer, PWM_SYNC. PWM_SYNC is asserted at the beginning and the center Introduction of a PWM cycle and so it aligns with the midpoint of the current and voltage ripple waveforms. -
Design of a Low Power and Area Efficient Digital Down Converter and SINC Filter in CMOS 90-Nm Technology
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2011 Design of a Low Power and Area Efficient Digital Down Converter and SINC Filter in CMOS 90-nm Technology Steven John Billman Wright State University Follow this and additional works at: https://corescholar.libraries.wright.edu/etd_all Part of the Electrical and Computer Engineering Commons Repository Citation Billman, Steven John, "Design of a Low Power and Area Efficient Digital Down Converter and SINC Filter in CMOS 90-nm Technology" (2011). Browse all Theses and Dissertations. 444. https://corescholar.libraries.wright.edu/etd_all/444 This Thesis is brought to you for free and open access by the Theses and Dissertations at CORE Scholar. It has been accepted for inclusion in Browse all Theses and Dissertations by an authorized administrator of CORE Scholar. For more information, please contact [email protected]. Design of a Low Power and Area Efficient Digital Down Converter and SINC Filter in CMOS 90-nm Technology A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By Steven John Billman B.S., Cedarville University, 2009 2011 Wright State University WRIGHT STATE UNIVERSITY SCHOOL OF GRADUATE STUDIES Jun 10, 2011 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Steven Billman ENTITLED Design of a Low Power and Area Efficient Digital Down Converter and SINC Filter In CMOS 90nm Technology BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science in Engineering Saiyu Ren, Ph.D. Thesis Director Kefu Xue, Ph.D., Chair Department of Electrical Engineering College of Engineering and Computer Science Committee on Final Examination Saiyu Ren, Ph.D. -
AN-1265 APPLICATION NOTE One Technology Way • P
AN-1265 APPLICATION NOTE One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com Isolated Motor Control Feedback Using the ADSP-CM402F/ADSP-CM403F/ ADSP-CM407F/ADSP-CM408F Sinc Filters and the AD7403 By Dara O’Sullivan, Jens Sorensen, and Aengus Murray INTRODUCTION MOTOR CURRENT CONTROL APPLICATIONS This application note introduces the main features of the sinc Figure 1 shows a simplified schematic of an isolated current filters of the ADSP-CM402F/ADSP-CM403F/ADSP-CM407F/ feedback system for inverter fed motor drives. The system ADSP-CM408F microprocessors, with a focus on high overcomes the difficulty of isolating the analog signal that is performance motor control applications. generated across the current shunt from the high voltage common The purpose of this application note is to highlight the key signal that is generated by the switching power inverter. The capabilities of the sinc filter module and to provide guidance system converts the signal using isolated Σ-Δ modulators and on how to configure the sinc filter through software. For more then transmits a digital signal across the isolation barrier. information about the full range of sinc filter features and The Σ-Δ modulators generate a modulated bit stream as a function configuration registers, see the ADSP-CM40x Mixed-Signal of the input voltage and transmit the signal across the isolation Control Processor with ARM Cortex-M4 Hardware Reference barrier to a filter circuit on the low voltage side. The sinc filter and the documentation within the ADSP-CM40x Enablement filters the bit stream from a second-order modulator, such as the Software package. -

Paper Template
International Journal of Science and Engineering Investigations vol. 2, issue 21, October 2013 ISSN: 2251-8843 Implementation of Mathematical Model of Window Function for Designing a Symmetrical Low Pass FIR Filter Joy Deb Nath1, Md. Mushfiqur Rahman2, Md. Haider Ali3 1,2,3Department of Electrical & Electronic Engineering, Chittagong University of Engineering & Technology (CUET), Chittagong-4349, Bangladesh ([email protected], [email protected], [email protected]) Abstract- Low pass filter is very important part of Digital frequency response near to ideal low pass filter, because there Signal Processing. Taking Fourier Transform of ideal filter are ripple in passband and stopband. Transition band between kernel (impulse response) gives ideal low pass filter. But when passband and stopband also wider than ideal low pass filter. To taking Fourier Transform of truncated sinc filter kernel then it remove this ripple and to get a better transition band some gives frequency response near to ideal low pass filter with Window technique is adopted. ripple in passband and stopband at frequency domain. The remainder of this paper is organized as follows. Transition band between passband and stopband also wider Section II describes the literature review and methodology. than ideal low pass filter. To remove this ripple and to get a Section III describes performance evaluation of the proposed better transition band at frequency domain, here we design and window. Finally, discussion and conclusion is presented. implement a symmetrical low pass FIR filter at frequency domain by window technique and compare the performance of our proposed window function with the existing window II. LITERATURE REVIEW AND METHODOLOGY function. -

Sampling and Reconstruction and Then Using Those Samples to Reconstruct New Functions That Are Similar to the Original (Reconstruction)
Sampling theory • Sampling theory: the theory of taking discrete sample values (grid of color pixels) from functions defined over continuous domains (incident radiance defined over the film plane) Sampling and Reconstruction and then using those samples to reconstruct new functions that are similar to the original (reconstruction). Digital Image Synthesis Yung-Yu Chuang Sampler: selects sample points on the image plane 10/25/2005 Filter: blends multiple samples together with slides by Pat Hanrahan, Torsten Moller and Brian Curless Aliasing Fourier analysis • Approximation errors: jagged edges or • Most functions can be decomposed into a flickering in animation weighted sum of shifted sinusoids. ∞ F(s) = f (x)e−i2πsxdx eix = cos x + isin x sample value ∫−∞ spatial domain frequency domain sample position Fourier analysis Fourier analysis spatial domain frequency domain F{}f (x) = F(s) F{}{}af (x) = aF f (x) F{}{}{}f (x) + g(x) = F f (x) +F g(x) Fourier transform is a linear operation. ∞ inverse Fourier transform f (x) = F(s)ei2πsxdx ∫−∞ Convolution theorem 1D convolution theorem example g(x) = f (x)∗h(x) ∞ = ∫ f (x')h(x − x')dx' −∞ 2D convolution theorem example The delta function f(x,y) h(x,y) g(x,y) • Dirac delta function, zero width, infinite height and unit area ∗ ⇒ × ⇒ F(sx,sy)H(sx,sy)G(sx,sy) Sifting and shifting Shah/impulse train function spatial domain frequency domain , Sampling Reconstruction band limited The reconstructed function is obtained by interpolating among the samples in some manner In math forms Reconstruction filters The sinc filter, while ideal, ~ has two drawbacks: F = (F(s)∗III(s))×Π(s) • It has large support (slow to compute) ~ • It introduces ringing in f = ( f (x)× III(x))∗sinc(x) practice ~ ∞ f (x) = ∑sinc(x − i) f (i) i=−∞ The box filter is bad because its Fourier transform is a sinc filter which includes high frequency contribution from the infinite series of other copies. -

Methods for Efficient, High Quality Volume Resampling in The
Methods for Efficient, High Quality Volume Resampling in the Frequency Domain Aili Li ∗ Klaus Mueller † Thomas Ernst ‡ Center for Visual Computing, Computer Science Department Medical Department Stony Brook University Brookhaven National Laboratory ABSTRACT • Regular warps, such as perspective warps, for post-warp vol- ume rendering with parallel rays. Resampling is a frequent task in visualization and medical imag- ing. It occurs whenever images or volumes are magnified, rotated, The fidelity of the resampled image or volume is highly depen- translated, or warped. Resampling is also an integral procedure in dent on the quality of the resampling filter used in the process. the registration of multi-modal datasets, such as CT, PET, and MRI, Many evaluations of interpolation filters have become available in the correction of motion artifacts in MRI, and in the alignment over the years, both in terms of their quality and their computa- of temporal volume sequences in fMRI. It is well known that the tional effort [15, 17, 18, 21, 23], and a history of interpolation since quality of the resampling result depends heavily on the quality of the Babylonian times has been collected by Meijiring [16]. Gener- the interpolation filter used. However, high-quality filters are rarely ally, the wider the filter in the spatial domain, the better its quality employed in practice due to their large spatial extents. In this pa- (assuming proper parameter tuning). For example, a cubic convo- per, we explore a new resampling technique that operates in the lution filter of half width=2 tends to give better interpolation results frequency-domain where high- quality filtering is feasible.