Scavenging Ports' Optimal Design of a Two-Stroke Small Aeroengine Based on the Benson/Bradham Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Effect of Turbocharging on Volumetric Efficiency in Low Heat Rejection C.I. Engine Fueled with Jatrophafor Improved Performance
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 4 Issue 03, March-2015 The Effect of Turbocharging on Volumetric Efficiency in Low Heat Rejection C.I. Engine fueled with Jatrophafor Improved Performance R. Ganapathi *, Dr. B. Durga Prasad** Lecturer, Professor, Mechanical Engineering department, Mechanical Engineering department, JNTUA College of Engineering, JNTUA College of Engineering, Ananthapuramu, A.P, India. Ananthapuramu, A.P, India. burned. This can be achieved with an LHR engine dueto Abstract:- The world’s rapidly dwindling petroleum the availability of higher temperature at the time of fuel supplies, their raising cost and the growing danger of injection. The heat available due to insulation can be environmental pollution from these fuel, have some effectively used for vaporizing alternative fuel. Some substitute of conventional fuels, vegetable oils has been important advantages of the LHR engines are improved fuel considered as one of the feasible substitute to economy, reduced HC and CO emission, reduced noise due conventional fuel. Among all the fuels, tested Jatropha to lower rate of pressure rise and higher energy in the oil properties are almost closer to diesel, particularly exhaust gases [2 & 3]. However, one of the main problems cetane rating and heat value. In present work in the LHR engines is the drop in volumetric experiments are conducted with Brass Crown efficiency. This further decrease the density of air Aluminium piston with air gap, an air gap liner and entering the cylinder because of high wall temperatures of PSZ coated head and valve have been used in the the LHR engine. The degree of degradation of volumetric present study, which generates higher temperature in efficiency depends on the degree of insulation. -

Supercharger
Supercharger 1 4/13/2019 Supercharger Air Flow Requirements • Naturally aspirated engines with throttle bodies rely on atmospheric pressure to push an air–fuel mixture into the combustion chamber vacuum created by the down stroke of a piston. • The mixture is then compressed before ignition to increase the force of the burning, expanding gases. • The greater the mixture compression, the greater the power resulting from combustion. Engineers calculate engine airflow requirements using these three factors: – Engine displacement – Engine revolutions per minute (RPM) – Volumetric efficiency Volumetric efficiency – is a comparison of the actual volume of air–fuel mixture drawn into an engine to the theoretical maximum volume that could be drawn in. – Volumetric efficiency decreases as engine speed increases. 2 4/13/2019 Supercharger Principles of Power Increase: The power output of the engine depend up on the amount of air induced per unit time and thermal efficiency. The amount of air induced per unit time can be increased by: Increasing the engine speed. the increase in engine speed calls for rigid and robust engine as the inertia load increase also the engine fraction and bearing load increase and also the volumetric efficiency decrease. Increasing the density of air at inlet. The increase of inlet air density calls supercharging which usually used to increase the power output from engine due to increase the air pressure at the inlet of engine. 3 4/13/2019 Supercharger The Objects of Supercharging: To increase the power output for a given weight and bulk of the engine. This is important for aircraft, marine and automotive engines where weight and space are important. -

Modernizing the Opposed-Piston, Two-Stroke Engine For
Modernizing the Opposed-Piston, Two-Stroke Engine 2013-26-0114 for Clean, Efficient Transportation Published on 9th -12 th January 2013, SIAT, India Dr. Gerhard Regner, Laurence Fromm, David Johnson, John Kosz ewnik, Eric Dion, Fabien Redon Achates Power, Inc. Copyright © 2013 SAE International and Copyright@ 2013 SIAT, India ABSTRACT Opposed-piston (OP) engines were once widely used in Over the last eight years, Achates Power has perfected the OP ground and aviation applications and continue to be used engine architecture, demonstrating substantial breakthroughs today on ships. Offering both fuel efficiency and cost benefits in combustion and thermal efficiency after more than 3,300 over conventional, four-stroke engines, the OP architecture hours of dynamometer testing. While these breakthroughs also features size and weight advantages. Despite these will initially benefit the commercial and passenger vehicle advantages, however, historical OP engines have struggled markets—the focus of the company’s current development with emissions and oil consumption. Using modern efforts—the Achates Power OP engine is also a good fit for technology, science and engineering, Achates Power has other applications due to its high thermal efficiency, high overcome these challenges. The result: an opposed-piston, specific power and low heat rejection. two-stroke diesel engine design that provides a step-function improvement in brake thermal efficiency compared to conventional engines while meeting the most stringent, DESIGN ATTRIBUTES mandated emissions -

2-Stroke Scavenging in Conventional and Minimally-Modified 4-Stroke
inventions Article 2-Stroke Scavenging in Conventional and Minimally-Modified 4-Stroke Engines for Heavy Duty Applications at Low to Medium Speeds Dirk Rueter Institute of Measurement and Sensor Technology, University of Applied Sciences Ruhr-West, D-45479 Muelheim an der Ruhr, Germany; [email protected] Received: 14 June 2019; Accepted: 7 August 2019; Published: 9 August 2019 Abstract: The transformation of a standard 4-stroke cylinder head into a torque-improved and gradually more efficient 2-stroke design is discussed. The concept with an effective loop scavenging via an extended inlet valve holds promise for engines at low- to medium-rotational speeds for typical designs of conventional 4-stroke cylinder heads. Calculations, flow simulations, and visualizations of experimental flows in relevant geometries and time scales indicate feasibility, followed by a small engine demonstration. Based on presumably long-forgotten and outdated patents, and the central topic of this contribution, an additional jockey rides on the inlet valve’s disk (facing away from the combustion chamber) and reshapes the in-cylinder flow into a reverted tumble. A quick gas exchange with a well-suppressed shortcut into the open exhaust is approached. For overall mechanical efficiency, the required charge pressure for scavenging is of paramount importance due to the short scavenging time and the intake’s reduced cross-section. Herein, still acceptable charging pressures are reported for scavenging periods equivalent to low or medium rotational speeds, as characteristic for heavy-duty applications. Using widely available components (charger, direct injection, variable camshaft angles) an increased engine efficiency is suggested due to the 2-stroke’s downsizing effect (relatively less internal friction as well as the promise of more torque and a decreased size). -

Air Filter Sizing
SSeeccoonndd SSttrriikkee The Newsletter for the Superformance Owners Group January 17, 2008 / September 5, 2011 Volume 8, Number 1 SECOND STRIKE CARBURETOR CALCULATOR The Carburetor Controlling the airflow introduces the throttle plate assembly. Metering the fuel requires measuring the airflow and measuring the airflow introduces the venturi. Metering the fuel flow introduces boosters. The high flow velocity requirement constrains the size of the air passages. These obstructions cause a pressure drop, a necessary consequence of proper carburetor function. Carburetors are sized by airflow, airflow at 5% pressure drop for four-barrels, 10% for two-barrels. This means that the price for a properly sized four-barrel is a 5% pressure loss and a corresponding 5% horsepower loss. The important thing to remember is that carburetors are sized to provide balanced performance across the entire driving range, not just peak horsepower. When designing low and mid range metering, the carburetor engineers assume airflow conditions for a properly As with everything in the engine, airflow is power. sized carburetor - one sized for 5% loss at the power peak. Carburetors are a key to airflow. As with any component, the key to best all around performance is to pick parts that match Selecting a larger carburetor than recommended will reduce your performance goal and each other – carburetor, intake, pressure losses at high rpm and may help top end horsepower, heads, exhaust, cam, displacement, rpm range, and bottom but will have lower flow velocity at low rpm and poor end. metering and mixing with a loss in low and mid range power and drivability. -
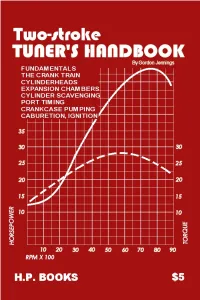
Jennings: Two-Stroke Tuner's Handbook
Two-Stroke TUNER’S HANDBOOK By Gordon Jennings Illustrations by the author Copyright © 1973 by Gordon Jennings Compiled for reprint © 2007 by Ken i PREFACE Many years have passed since Gordon Jennings first published this manual. Its 2007 and although there have been huge technological changes the basics are still the basics. There is a huge interest in vintage snowmobiles and their “simple” two stroke power plants of yesteryear. There is a wealth of knowledge contained in this manual. Let’s journey back to 1973 and read the book that was the two stroke bible of that era. Decades have passed since I hung around with John and Jim. John and I worked for the same corporation and I found a 500 triple Kawasaki for him at a reasonable price. He converted it into a drag bike, modified the engine completely and added mikuni carbs and tuned pipes. John borrowed Jim’s copy of the ‘Two Stoke Tuner’s Handbook” and used it and tips from “Fast by Gast” to create one fast bike. John kept his 500 until he retired and moved to the coast in 2005. The whereabouts of Wild Jim, his 750 Kawasaki drag bike and the only copy of ‘Two Stoke Tuner’s Handbook” that I have ever seen is a complete mystery. I recently acquired a 1980 Polaris TXL and am digging into the inner workings of the engine. I wanted a copy of this manual but wasn’t willing to wait for a copy to show up on EBay. Happily, a search of the internet finally hit on a Word version of the manual. -

Modeling Scavenging for a Hydraulic Free-Piston Engine
Macalester Journal of Physics and Astronomy Volume 8 Issue 1 Spring 2020 Article 6 May 2020 Modeling Scavenging for a Hydraulic Free-Piston Engine Nathan Davies Macalester College, [email protected] Follow this and additional works at: https://digitalcommons.macalester.edu/mjpa Part of the Astrophysics and Astronomy Commons, and the Physics Commons Recommended Citation Davies, Nathan (2020) "Modeling Scavenging for a Hydraulic Free-Piston Engine," Macalester Journal of Physics and Astronomy: Vol. 8 : Iss. 1 , Article 6. Available at: https://digitalcommons.macalester.edu/mjpa/vol8/iss1/6 This Capstone is brought to you for free and open access by the Physics and Astronomy Department at DigitalCommons@Macalester College. It has been accepted for inclusion in Macalester Journal of Physics and Astronomy by an authorized editor of DigitalCommons@Macalester College. For more information, please contact [email protected]. Modeling Scavenging for a Hydraulic Free-Piston Engine Abstract The hydraulic free-piston engine at the University of Minnesota offers a solution to improve the hydraulic efficiency andeduce r emission output of off-road vehicles. We developed a MATLAB Simulink model to track the pressure, temperature, and mass profile of the fuel within the cylinder during operation. By varying different initial conditions of our model, we found that a higher intake manifold pressure and larger bottom dead center location results in higher scavenging efficiency. These results can be used to improve the controller of this engine and better maintain stable operation. Keywords Scavenging Hydraulic Free-Piston Engine Cover Page Footnote I would like to thank the Center for Compact and Efficient Fluidower P at the University of Minnesota for providing me with this research experience. -

RECIPROCATING COMPRESSOR PERFORMANCE IMPROVEMENT with RADIAL POPPET VALVES 2009 GMRC Gas Machinery Conference – Atlanta, GA – October 5‐7, 2009
RECIPROCATING COMPRESSOR PERFORMANCE IMPROVEMENT WITH RADIAL POPPET VALVES 2009 GMRC Gas Machinery Conference – Atlanta, GA – October 5‐7, 2009 Lauren D. Sperry, PE & W. Norman Shade, PE ACI Services Inc. ABSTRACT Over the past decade, radial compressor valves and unloaders have been successfully introduced into reciprocating compressors for the gas transmission industry. The unique radial valve system seats multiple rows of poppets over ports in a cylindrical sleeve that replaces the traditional cage and single‐deck valve used in a reciprocating compressor. The radial valve concept has been applied for both suction and discharge valves in a broad range of compressor models and pipeline cylinder classes. Use of these valves has resulted in significant increases in efficiency and reductions in HP/MMSCFD. For cylinder end deactivation, the cylindrical valve guard is moved to slide the poppets off their seats and away from the ports, providing a relatively unobstructed flow path for the gas. The resulting parasitic losses of the deactivated cylinder end approach the losses achieved by complete removal of a traditional valve. Use of radial valves has also been found to significantly increase unit capacity. Some of this increase stems from being able to operate the more efficient radial valved compressor with less unloading, so that there is more effective displacement utilized for the same power input. Moreover, in practice the significant added fixed volumetric clearance inherent in the radial poppet valves has not reduced the measured volumetric efficiency or the capacity as much as traditional theory would predict. This paper will present four case studies that show the actual field operating performance improvements obtained with radial poppet valves on both low speed and high speed compressors, along with laboratory test comparisons, and an explanation of why the capacity can increase even though the fixed clearance increases. -

THERMAL EFFICIENCY", of the Engine
PowerPower FlowFlow andand EfficiencyEfficiency Engine Testing and Instrumentation 1 Efficiencies When the engine converts fuel into power, the process is rather inefficient and only about a quarter of the potential energy in the fuel is released as power at the flywheel. The rest is wasted as heat going down the exhaust and into the air or water. This ratio of actual to potential power is called the "THERMAL EFFICIENCY", of the engine. How much energy reaches the flywheel ( or dynamometer) compared to how much could theoretically be released is a function of three efficiencies, namely: 1. Thermal 2 Mechanical 3. Volumetric Engine Testing and Instrumentation 2 Thermal Efficiency Thermal efficiency can be quoted as either brake or indicated. Indicated efficiency is derived from measurements taken at the flywheel. The thermal efficiency is sometimes called the fuel conversion efficiency, defined as the ratio of the work produced per cycle to the amount of fuel energy supplied per cycle that can be released in the combustion process. Engine Testing and Instrumentation 3 B.S. = Brake Specific Brake Specific Fuel Consumption = mass flow rate of fuel ÷ power output bsHC = Brake Specific Hydrocarbons = mass of hydrocarbons/power output. e.g. 0.21 kg /kW hour Engine Testing and Instrumentation 4 Thermal Efficiency Wc Ps ηt = = m f QHV µ f QHV Wc − work _ per _ cycle Ps − power _ output m f − mass _ of _ fuel _ per _ cycle QHV − heating _ value _ of _ fuel µ f − fuel _ mass _ flow _ rate Specific fuel consumption µ Sfc = f Ps Therefore 1 3600 82.76 ηt = = = Sfc ⋅QHV Sfc(g / kW ⋅hr)QHV (MJ / kg) Sfc Since, QHV for petrol = 43.5 MJ/kg Therefore, the brake thermal efficiency = 82.76/ sfc The indicated thermal efficiency = 82.76 / isfc Engine Testing and Instrumentation 5 Mechanical Efficiency The mechanical efficiency compares the amount of energy imparted to the pistons as mechanical work in the expansion stroke to that which actually reaches the flywheel or dynamometer. -

Analysis of the Scavenging Process of a Two-Stroke Free-Piston Engine Based on the Selection of Scavenging Ports Or Valves
energies Article Analysis of the Scavenging Process of a Two-Stroke Free-Piston Engine Based on the Selection of Scavenging Ports or Valves Boru Jia 1,2,* ID , Yaodong Wang 1, Andrew Smallbone 1 and Anthony Paul Roskilly 1 1 Sir Joseph Swan Centre for Energy Research, Newcastle University, Newcastle upon Tyne NE1 7RU, UK; [email protected] (Y.W.); [email protected] (A.S.); [email protected] (A.P.R.) 2 School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China * Correspondence: [email protected] or [email protected]; Tel.: +44-07547839154 Received: 1 December 2017; Accepted: 24 January 2018; Published: 2 February 2018 Abstract: The free-piston engine generator (FPEG) is a linear energy conversion device with the objective of utilisation within a hybrid-electric automotive vehicle power system. In this research, the piston dynamic characteristics of an FPEG is compared with that of a conventional engine (CE) of the same size, and the difference in the valve timing is compared for both port scavenging type and valve scavenging type, with the exhaust valve closing timing is selected as the parameter. A zero-dimensional simulation model is developed in Ricardo WAVE software (2016.1), with the piston dynamics obtained from the simulation model in Matlab/SIMULINK (R2017a). For the CE and FEPG using scavenging ports, in order to improve its power output to the same level as that of a CE, the inlet gas pressure is suggested to be improved to above 1.2 bar, approximately 0.2 bar higher than that used for a CE. -
19FFL-0023 2-Stroke Engine Options for Automotive Use: a Fundamental Comparison of Different Potential Scavenging Arrangements for Medium-Duty Truck Applications
Citation for published version: Turner, J, Head, RA, Chang, J, Engineer, N, Wijetunge, RS, Blundell, DW & Burke, P 2019, '2-Stroke Engine Options for Automotive Use: A Fundamental Comparison of Different Potential Scavenging Arrangements for Medium-Duty Truck Applications', SAE Technical Paper Series, pp. 1-21. https://doi.org/10.4271/2019-01-0071 DOI: 10.4271/2019-01-0071 Publication date: 2019 Document Version Peer reviewed version Link to publication The final publication is available at SAE Mobilus via https://doi.org/10.4271/2019-01-0071 University of Bath Alternative formats If you require this document in an alternative format, please contact: [email protected] General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Download date: 27. Sep. 2021 Paper Offer 19FFL-0023 2-Stroke Engine Options for Automotive Use: A Fundamental Comparison of Different Potential Scavenging Arrangements for Medium-Duty Truck Applications Author, co-author (Do NOT enter this information. It will be pulled from participant tab in MyTechZone) Affiliation (Do NOT enter this information. It will be pulled from participant tab in MyTechZone) Abstract For the opposed-piston engine, once the port timing obtained by the optimizer had been established, a supplementary study was conducted looking at the effect of relative phasing of the crankshafts The work presented here seeks to compare different means of on performance and economy. -

Basic 2 Stroke Tuning
Basic 2 stroke Tuning Changing the power band of your dirt bike engine is simple when you know the basics. A myriad of different aftermarket accessories is available for you to custom tune your bike to better suit your needs. The most common mistake is to choose the wrong combination of engine components, making the engine run worse than stock. Use this as a guide to inform yourself on how changes in engine components can alter the powerband of bike's engine. Use the guide at the end of the chapter to map out your strategy for changing engine components to create the perfect power band. TWO-STROKE PRINCIPLES Although a two-stroke engine has less moving parts than a four-stroke engine, a two- stroke is a complex engine because it relies on gas dynamics. There are different phases taking place in the crankcase and in the cylinder bore at the same time. That is how a two- stroke engine completes a power cycle in only 360 degrees of crankshaft rotation compared to a four-stroke engine which requires 720 degrees of crankshaft rotation to complete one power cycle. These four drawings give an explanation of how a two-stroke engine works. 1) Starting with the piston at top dead center (TDC 0 degrees) ignition has occurred and the gasses in the combustion chamber are expanding and pushing down the piston. This pressurizes the crankcase causing the reed valve to close. At about 90 degrees after TDC the exhaust port opens ending the power stroke. A pressure wave of hot expanding gasses flows down the exhaust pipe.