Astrometric Search for Extrasolar Planets in Stellar Multiple Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Exomoon Habitability Constrained by Illumination and Tidal Heating
submitted to Astrobiology: April 6, 2012 accepted by Astrobiology: September 8, 2012 published in Astrobiology: January 24, 2013 this updated draft: October 30, 2013 doi:10.1089/ast.2012.0859 Exomoon habitability constrained by illumination and tidal heating René HellerI , Rory BarnesII,III I Leibniz-Institute for Astrophysics Potsdam (AIP), An der Sternwarte 16, 14482 Potsdam, Germany, [email protected] II Astronomy Department, University of Washington, Box 951580, Seattle, WA 98195, [email protected] III NASA Astrobiology Institute – Virtual Planetary Laboratory Lead Team, USA Abstract The detection of moons orbiting extrasolar planets (“exomoons”) has now become feasible. Once they are discovered in the circumstellar habitable zone, questions about their habitability will emerge. Exomoons are likely to be tidally locked to their planet and hence experience days much shorter than their orbital period around the star and have seasons, all of which works in favor of habitability. These satellites can receive more illumination per area than their host planets, as the planet reflects stellar light and emits thermal photons. On the contrary, eclipses can significantly alter local climates on exomoons by reducing stellar illumination. In addition to radiative heating, tidal heating can be very large on exomoons, possibly even large enough for sterilization. We identify combinations of physical and orbital parameters for which radiative and tidal heating are strong enough to trigger a runaway greenhouse. By analogy with the circumstellar habitable zone, these constraints define a circumplanetary “habitable edge”. We apply our model to hypothetical moons around the recently discovered exoplanet Kepler-22b and the giant planet candidate KOI211.01 and describe, for the first time, the orbits of habitable exomoons. -
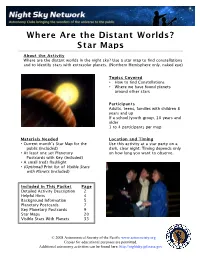
Where Are the Distant Worlds? Star Maps
W here Are the Distant Worlds? Star Maps Abo ut the Activity Whe re are the distant worlds in the night sky? Use a star map to find constellations and to identify stars with extrasolar planets. (Northern Hemisphere only, naked eye) Topics Covered • How to find Constellations • Where we have found planets around other stars Participants Adults, teens, families with children 8 years and up If a school/youth group, 10 years and older 1 to 4 participants per map Materials Needed Location and Timing • Current month's Star Map for the Use this activity at a star party on a public (included) dark, clear night. Timing depends only • At least one set Planetary on how long you want to observe. Postcards with Key (included) • A small (red) flashlight • (Optional) Print list of Visible Stars with Planets (included) Included in This Packet Page Detailed Activity Description 2 Helpful Hints 4 Background Information 5 Planetary Postcards 7 Key Planetary Postcards 9 Star Maps 20 Visible Stars With Planets 33 © 2008 Astronomical Society of the Pacific www.astrosociety.org Copies for educational purposes are permitted. Additional astronomy activities can be found here: http://nightsky.jpl.nasa.gov Detailed Activity Description Leader’s Role Participants’ Roles (Anticipated) Introduction: To Ask: Who has heard that scientists have found planets around stars other than our own Sun? How many of these stars might you think have been found? Anyone ever see a star that has planets around it? (our own Sun, some may know of other stars) We can’t see the planets around other stars, but we can see the star. -

100 Closest Stars Designation R.A
100 closest stars Designation R.A. Dec. Mag. Common Name 1 Gliese+Jahreis 551 14h30m –62°40’ 11.09 Proxima Centauri Gliese+Jahreis 559 14h40m –60°50’ 0.01, 1.34 Alpha Centauri A,B 2 Gliese+Jahreis 699 17h58m 4°42’ 9.53 Barnard’s Star 3 Gliese+Jahreis 406 10h56m 7°01’ 13.44 Wolf 359 4 Gliese+Jahreis 411 11h03m 35°58’ 7.47 Lalande 21185 5 Gliese+Jahreis 244 6h45m –16°49’ -1.43, 8.44 Sirius A,B 6 Gliese+Jahreis 65 1h39m –17°57’ 12.54, 12.99 BL Ceti, UV Ceti 7 Gliese+Jahreis 729 18h50m –23°50’ 10.43 Ross 154 8 Gliese+Jahreis 905 23h45m 44°11’ 12.29 Ross 248 9 Gliese+Jahreis 144 3h33m –9°28’ 3.73 Epsilon Eridani 10 Gliese+Jahreis 887 23h06m –35°51’ 7.34 Lacaille 9352 11 Gliese+Jahreis 447 11h48m 0°48’ 11.13 Ross 128 12 Gliese+Jahreis 866 22h39m –15°18’ 13.33, 13.27, 14.03 EZ Aquarii A,B,C 13 Gliese+Jahreis 280 7h39m 5°14’ 10.7 Procyon A,B 14 Gliese+Jahreis 820 21h07m 38°45’ 5.21, 6.03 61 Cygni A,B 15 Gliese+Jahreis 725 18h43m 59°38’ 8.90, 9.69 16 Gliese+Jahreis 15 0h18m 44°01’ 8.08, 11.06 GX Andromedae, GQ Andromedae 17 Gliese+Jahreis 845 22h03m –56°47’ 4.69 Epsilon Indi A,B,C 18 Gliese+Jahreis 1111 8h30m 26°47’ 14.78 DX Cancri 19 Gliese+Jahreis 71 1h44m –15°56’ 3.49 Tau Ceti 20 Gliese+Jahreis 1061 3h36m –44°31’ 13.09 21 Gliese+Jahreis 54.1 1h13m –17°00’ 12.02 YZ Ceti 22 Gliese+Jahreis 273 7h27m 5°14’ 9.86 Luyten’s Star 23 SO 0253+1652 2h53m 16°53’ 15.14 24 SCR 1845-6357 18h45m –63°58’ 17.40J 25 Gliese+Jahreis 191 5h12m –45°01’ 8.84 Kapteyn’s Star 26 Gliese+Jahreis 825 21h17m –38°52’ 6.67 AX Microscopii 27 Gliese+Jahreis 860 22h28m 57°42’ 9.79, -

Fine-Structure Feii and Siii Absorption in the Spectrum of GRB 051111
Draft version November 11, 2018 Preprint typeset using LATEX style emulateapj Fine-Structure Fe II and Si II Absorption in the Spectrum of GRB051111: Implications for the Burst Environment E. Berger1,2,3, B. E. Penprase4, D. B. Fox5, S. R. Kulkarni6, G. Hill7, B. Schaefer7, and M. Reed7 Draft version November 11, 2018 ABSTRACT We present an analysis of fine-structure transitions of Fe II and Si II detected in a high-resolution optical spectrum of the afterglow of GRB051111 (z =1.54948). The fine-structure absorption features arising from Fe II* to Fe II****, as well as Si II*, are confined to a narrow velocity structure extending over ±30 km s−1, which we interpret as the burst local environment, most likely a star forming region. We investigate two scenarios for the excitation of the fine-structure levels by collisions with electrons and radiative pumping by an infra-red or ultra-violet radiation field produced by intense star formation in the GRB environment, or by the GRB afterglow itself. We find that the conditions required for collisional excitation of Fe II fine-structure states cannot be easily reconciled with the relatively weak Si II* absorption. Radiative pumping by either IR or UV emission requires > 103 massive hot OB stars within a compact star-forming region a few pc in size, and in the case of IR pumping a large dust content. On the other hand, it is possible that the GRB itself provides the source of IR and/or UV radiation, in which case we estimate that the excitation takes place at a distance of ∼ 10 − 20 pc from the burst. -
February 2014 BRAS Newsletter
February, 2014 Next Meeting February 10th 7PM at the HRPO Self Portrait of Mars Rover Opportunity: 10 years and still going! What's In This Issue? President's Message Vice-President's Message Secretary's Summary Message from HRPO Globe at Night 20/20 Vision Imagine Your Parks Recent Forum Posts President's Message Well, the Nordic ice giants have moved into the state and have settled in for a while. By the time you get this we will have gone through at least two episodes of wet icy sub- freezing weather fronts. We sorry Louisianans just are not used to this stuff. Thankfully, the skies are crystal clear afterwards. They aren’t always the best for planetary work, with the high atmospheric turbulence that often follows a front, but it is a good time for deep sky work. The skies provide a much higher contrast that allows us to see those fine low-contrast details that are often so hard to pull out in these climes. There is a supernova visible in the edge-on galaxy M82, in Ursa Major. As I write this, it is visible in scopes around 8 inches aperture and up, and easily photographed. Be sure to take a look. It is not every day we get a supernova so bright. During our last meeting, we took a vote on what item we BRAS members would like most as our next big ticket raffle prize. The Coronado PST won. They are much more affordable now, sometimes selling for as little as $650. We are shopping around for the best deal now. -
The Maunder Minimum and the Variable Sun-Earth Connection
The Maunder Minimum and the Variable Sun-Earth Connection (Front illustration: the Sun without spots, July 27, 1954) By Willie Wei-Hock Soon and Steven H. Yaskell To Soon Gim-Chuan, Chua Chiew-See, Pham Than (Lien+Van’s mother) and Ulla and Anna In Memory of Miriam Fuchs (baba Gil’s mother)---W.H.S. In Memory of Andrew Hoff---S.H.Y. To interrupt His Yellow Plan The Sun does not allow Caprices of the Atmosphere – And even when the Snow Heaves Balls of Specks, like Vicious Boy Directly in His Eye – Does not so much as turn His Head Busy with Majesty – ‘Tis His to stimulate the Earth And magnetize the Sea - And bind Astronomy, in place, Yet Any passing by Would deem Ourselves – the busier As the Minutest Bee That rides – emits a Thunder – A Bomb – to justify Emily Dickinson (poem 224. c. 1862) Since people are by nature poorly equipped to register any but short-term changes, it is not surprising that we fail to notice slower changes in either climate or the sun. John A. Eddy, The New Solar Physics (1977-78) Foreword By E. N. Parker In this time of global warming we are impelled by both the anticipated dire consequences and by scientific curiosity to investigate the factors that drive the climate. Climate has fluctuated strongly and abruptly in the past, with ice ages and interglacial warming as the long term extremes. Historical research in the last decades has shown short term climatic transients to be a frequent occurrence, often imposing disastrous hardship on the afflicted human populations. -

Instrumental Methods for Professional and Amateur
Instrumental Methods for Professional and Amateur Collaborations in Planetary Astronomy Olivier Mousis, Ricardo Hueso, Jean-Philippe Beaulieu, Sylvain Bouley, Benoît Carry, Francois Colas, Alain Klotz, Christophe Pellier, Jean-Marc Petit, Philippe Rousselot, et al. To cite this version: Olivier Mousis, Ricardo Hueso, Jean-Philippe Beaulieu, Sylvain Bouley, Benoît Carry, et al.. Instru- mental Methods for Professional and Amateur Collaborations in Planetary Astronomy. Experimental Astronomy, Springer Link, 2014, 38 (1-2), pp.91-191. 10.1007/s10686-014-9379-0. hal-00833466 HAL Id: hal-00833466 https://hal.archives-ouvertes.fr/hal-00833466 Submitted on 3 Jun 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Instrumental Methods for Professional and Amateur Collaborations in Planetary Astronomy O. Mousis, R. Hueso, J.-P. Beaulieu, S. Bouley, B. Carry, F. Colas, A. Klotz, C. Pellier, J.-M. Petit, P. Rousselot, M. Ali-Dib, W. Beisker, M. Birlan, C. Buil, A. Delsanti, E. Frappa, H. B. Hammel, A.-C. Levasseur-Regourd, G. S. Orton, A. Sanchez-Lavega,´ A. Santerne, P. Tanga, J. Vaubaillon, B. Zanda, D. Baratoux, T. Bohm,¨ V. Boudon, A. Bouquet, L. Buzzi, J.-L. Dauvergne, A. -

Gaia Data Release 2 Special Issue
A&A 623, A110 (2019) Astronomy https://doi.org/10.1051/0004-6361/201833304 & © ESO 2019 Astrophysics Gaia Data Release 2 Special issue Gaia Data Release 2 Variable stars in the colour-absolute magnitude diagram?,?? Gaia Collaboration, L. Eyer1, L. Rimoldini2, M. Audard1, R. I. Anderson3,1, K. Nienartowicz2, F. Glass1, O. Marchal4, M. Grenon1, N. Mowlavi1, B. Holl1, G. Clementini5, C. Aerts6,7, T. Mazeh8, D. W. Evans9, L. Szabados10, A. G. A. Brown11, A. Vallenari12, T. Prusti13, J. H. J. de Bruijne13, C. Babusiaux4,14, C. A. L. Bailer-Jones15, M. Biermann16, F. Jansen17, C. Jordi18, S. A. Klioner19, U. Lammers20, L. Lindegren21, X. Luri18, F. Mignard22, C. Panem23, D. Pourbaix24,25, S. Randich26, P. Sartoretti4, H. I. Siddiqui27, C. Soubiran28, F. van Leeuwen9, N. A. Walton9, F. Arenou4, U. Bastian16, M. Cropper29, R. Drimmel30, D. Katz4, M. G. Lattanzi30, J. Bakker20, C. Cacciari5, J. Castañeda18, L. Chaoul23, N. Cheek31, F. De Angeli9, C. Fabricius18, R. Guerra20, E. Masana18, R. Messineo32, P. Panuzzo4, J. Portell18, M. Riello9, G. M. Seabroke29, P. Tanga22, F. Thévenin22, G. Gracia-Abril33,16, G. Comoretto27, M. Garcia-Reinaldos20, D. Teyssier27, M. Altmann16,34, R. Andrae15, I. Bellas-Velidis35, K. Benson29, J. Berthier36, R. Blomme37, P. Burgess9, G. Busso9, B. Carry22,36, A. Cellino30, M. Clotet18, O. Creevey22, M. Davidson38, J. De Ridder6, L. Delchambre39, A. Dell’Oro26, C. Ducourant28, J. Fernández-Hernández40, M. Fouesneau15, Y. Frémat37, L. Galluccio22, M. García-Torres41, J. González-Núñez31,42, J. J. González-Vidal18, E. Gosset39,25, L. P. Guy2,43, J.-L. Halbwachs44, N. C. Hambly38, D. -

IAU Division C Working Group on Star Names 2019 Annual Report
IAU Division C Working Group on Star Names 2019 Annual Report Eric Mamajek (chair, USA) WG Members: Juan Antonio Belmote Avilés (Spain), Sze-leung Cheung (Thailand), Beatriz García (Argentina), Steven Gullberg (USA), Duane Hamacher (Australia), Susanne M. Hoffmann (Germany), Alejandro López (Argentina), Javier Mejuto (Honduras), Thierry Montmerle (France), Jay Pasachoff (USA), Ian Ridpath (UK), Clive Ruggles (UK), B.S. Shylaja (India), Robert van Gent (Netherlands), Hitoshi Yamaoka (Japan) WG Associates: Danielle Adams (USA), Yunli Shi (China), Doris Vickers (Austria) WGSN Website: https://www.iau.org/science/scientific_bodies/working_groups/280/ WGSN Email: [email protected] The Working Group on Star Names (WGSN) consists of an international group of astronomers with expertise in stellar astronomy, astronomical history, and cultural astronomy who research and catalog proper names for stars for use by the international astronomical community, and also to aid the recognition and preservation of intangible astronomical heritage. The Terms of Reference and membership for WG Star Names (WGSN) are provided at the IAU website: https://www.iau.org/science/scientific_bodies/working_groups/280/. WGSN was re-proposed to Division C and was approved in April 2019 as a functional WG whose scope extends beyond the normal 3-year cycle of IAU working groups. The WGSN was specifically called out on p. 22 of IAU Strategic Plan 2020-2030: “The IAU serves as the internationally recognised authority for assigning designations to celestial bodies and their surface features. To do so, the IAU has a number of Working Groups on various topics, most notably on the nomenclature of small bodies in the Solar System and planetary systems under Division F and on Star Names under Division C.” WGSN continues its long term activity of researching cultural astronomy literature for star names, and researching etymologies with the goal of adding this information to the WGSN’s online materials. -

Eclipsing Systems with Pulsating Components (Types Β Cep, Δ Sct, Γ Dor Or Red Giant) in the Era of High-Accuracy Space Data
galaxies Review Eclipsing Systems with Pulsating Components (Types b Cep, d Sct, g Dor or Red Giant) in the Era of High-Accuracy Space Data Patricia Lampens Royal Observatory of Belgium, Ringlaan 3, 1180 Brussels, Belgium; [email protected] Abstract: Eclipsing systems are essential objects for understanding the properties of stars and stellar systems. Eclipsing systems with pulsating components are furthermore advantageous because they provide accurate constraints on the component properties, as well as a complementary method for pulsation mode determination, crucial for precise asteroseismology. The outcome of space missions aiming at delivering high-accuracy light curves for many thousands of stars in search of planetary systems has also generated new insights in the field of variable stars and revived the interest of binary systems in general. The detection of eclipsing systems with pulsating components has particularly benefitted from this, and progress in this field is growing fast. In this review, we showcase some of the recent results obtained from studies of eclipsing systems with pulsating components based on data acquired by the space missions Kepler or TESS. We consider different system configurations including semi-detached eclipsing binaries in (near-)circular orbits, a (near-)circular and non-synchronized eclipsing binary with a chemically peculiar component, eclipsing binaries showing the heartbeat phenomenon, as well as detached, eccentric double-lined systems. All display one or more pulsating component(s). Among the great variety of known classes of pulsating stars, we discuss unevolved or slightly evolved pulsators of spectral type B, A or F and red giants with solar-like oscillations. Some systems exhibit additional phenomena such as tidal effects, angular momentum transfer, (occasional) Citation: Lampens, P. -
Downloads/ Astero2007.Pdf) and by Aerts Et Al (2010)
This work is protected by copyright and other intellectual property rights and duplication or sale of all or part is not permitted, except that material may be duplicated by you for research, private study, criticism/review or educational purposes. Electronic or print copies are for your own personal, non- commercial use and shall not be passed to any other individual. No quotation may be published without proper acknowledgement. For any other use, or to quote extensively from the work, permission must be obtained from the copyright holder/s. i Fundamental Properties of Solar-Type Eclipsing Binary Stars, and Kinematic Biases of Exoplanet Host Stars Richard J. Hutcheon Submitted in accordance with the requirements for the degree of Doctor of Philosophy. Research Institute: School of Environmental and Physical Sciences and Applied Mathematics. University of Keele June 2015 ii iii Abstract This thesis is in three parts: 1) a kinematical study of exoplanet host stars, 2) a study of the detached eclipsing binary V1094 Tau and 3) and observations of other eclipsing binaries. Part I investigates kinematical biases between two methods of detecting exoplanets; the ground based transit and radial velocity methods. Distances of the host stars from each method lie in almost non-overlapping groups. Samples of host stars from each group are selected. They are compared by means of matching comparison samples of stars not known to have exoplanets. The detection methods are found to introduce a negligible bias into the metallicities of the host stars but the ground based transit method introduces a median age bias of about -2 Gyr. -

A Spectroscopy Study of Nearby Late-Type Stars, Possible Members of Stellar Kinematic Groups
Astronomy & Astrophysics manuscript no. 14948 c ESO 2018 June 11, 2018 A spectroscopy study of nearby late-type stars, possible members of stellar kinematic groups ⋆ ⋆⋆ J. Maldonado1, R.M. Mart´ınez-Arn´aiz2 , C. Eiroa1, D. Montes2, and B. Montesinos3 1 Universidad Aut´onoma de Madrid, Dpto. F´ısica Te´orica, M´odulo 15, Facultad de Ciencias, Campus de Cantoblanco, E-28049 Madrid, Spain, 2 Universidad Complutense de Madrid, Dpto. Astrof´ısica, Facultad Ciencias F´ısicas, E-28040 Madrid, Spain 3 Laboratorio de Astrof´ısica Estelar y Exoplanetas, Centro de Astrobiolog´ıa, LAEX-CAB (CSIC-INTA), ESAC Campus, P.O. BOX 78, E-28691, Villanueva de la Ca˜nada, Madrid, Spain Received ; Accepted ABSTRACT Context. Nearby late-type stars are excellent targets for seeking young objects in stellar associations and moving groups. The origin of these structures is still misunderstood, and lists of moving group members often change with time and also from author to author. Most members of these groups have been identified by means of kinematic criteria, leading to an important contamination of previous lists by old field stars. Aims. We attempt to identify unambiguous moving group members among a sample of nearby-late type stars by studying their kinematics, lithium abundance, chromospheric activity, and other age-related properties. Methods. High-resolution echelle spectra (R ∼ 57000) of a sample of nearby late-type stars are used to derive accurate radial velocities that are combined with the precise Hipparcos parallaxes and proper motions to compute galactic-spatial velocity components. Stars are classified as possible members of the classical moving groups according to their kinematics.