A LOW COST 3D PRINTED ROVER Miro Voellmy and Maximilian Ehrhardt
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Dustin M. Schroeder
Dustin M. Schroeder Assistant Professor of Geophysics Department of Geophysics, School of Earth, Energy, and Environmental Sciences 397 Panama Mall, Mitchell Building 361, Stanford University, Stanford, CA 94305 [email protected], 440.567.8343 EDUCATION 2014 Jackson School of Geosciences, University of Texas, Austin, TX Doctor of Philosophy (Ph.D.) in Geophysics 2007 Bucknell University, Lewisburg, PA Bachelor of Science in Electrical Engineering (B.S.E.E.), departmental honors, magna cum laude Bachelor of Arts (B.A.) in Physics, magna cum laude, minors in Mathematics and Philosophy PROFESSIONAL EXPERIENCE 2016 – present Assistant Professor of Geophysics, Stanford University 2017 – present Assistant Professor (by courtesy) of Electrical Engineering, Stanford University 2020 – present Center Fellow (by courtesy), Stanford Woods Institute for the Environment 2020 – present Faculty Affiliate, Stanford Institute for Human-Centered Artificial Intelligence 2021 – present Senior Member, Kavli Institute for Particle Astrophysics and Cosmology 2016 – 2020 Faculty Affiliate, Stanford Woods Institute for the Environment 2014 – 2016 Radar Systems Engineer, Jet Propulsion Laboratory, California Institute of Technology 2012 Graduate Researcher, Applied Physics Laboratory, Johns Hopkins University 2008 – 2014 Graduate Researcher, University of Texas Institute for Geophysics 2007 – 2008 Platform Hardware Engineer, Freescale Semiconductor SELECTED AWARDS 2021 Symposium Prize Paper Award, IEEE Geoscience and Remote Sensing Society 2020 Excellence in Teaching Award, Stanford School of Earth, Energy, and Environmental Sciences 2019 Senior Member, Institute of Electrical and Electronics Engineers 2018 CAREER Award, National Science Foundation 2018 LInC Fellow, Woods Institute, Stanford University 2016 Frederick E. Terman Fellow, Stanford University 2015 JPL Team Award, Europa Mission Instrument Proposal 2014 Best Graduate Student Paper, Jackson School of Geosciences 2014 National Science Olympiad Heart of Gold Award for Service to Science Education 2013 Best Ph.D. -

7'Tie;T;E ~;&H ~ T,#T1tmftllsieotog
7'tie;T;e ~;&H ~ t,#t1tMftllSieotOg, UCLA VOLUME 3 1986 EDITORIAL BOARD Mark E. Forry Anne Rasmussen Daniel Atesh Sonneborn Jane Sugarman Elizabeth Tolbert The Pacific Review of Ethnomusicology is an annual publication of the UCLA Ethnomusicology Students Association and is funded in part by the UCLA Graduate Student Association. Single issues are available for $6.00 (individuals) or $8.00 (institutions). Please address correspondence to: Pacific Review of Ethnomusicology Department of Music Schoenberg Hall University of California Los Angeles, CA 90024 USA Standing orders and agencies receive a 20% discount. Subscribers residing outside the U.S.A., Canada, and Mexico, please add $2.00 per order. Orders are payable in US dollars. Copyright © 1986 by the Regents of the University of California VOLUME 3 1986 CONTENTS Articles Ethnomusicologists Vis-a-Vis the Fallacies of Contemporary Musical Life ........................................ Stephen Blum 1 Responses to Blum................. ....................................... 20 The Construction, Technique, and Image of the Central Javanese Rebab in Relation to its Role in the Gamelan ... ................... Colin Quigley 42 Research Models in Ethnomusicology Applied to the RadifPhenomenon in Iranian Classical Music........................ Hafez Modir 63 New Theory for Traditional Music in Banyumas, West Central Java ......... R. Anderson Sutton 79 An Ethnomusicological Index to The New Grove Dictionary of Music and Musicians, Part Two ............ Kenneth Culley 102 Review Irene V. Jackson. More Than Drumming: Essays on African and Afro-Latin American Music and Musicians ....................... Norman Weinstein 126 Briefly Noted Echology ..................................................................... 129 Contributors to this Issue From the Editors The third issue of the Pacific Review of Ethnomusicology continues the tradition of representing the diversity inherent in our field. -

CAROL PATY [email protected] 1 Associate Professor Robert D. Clark
CAROL PATY [email protected] Associate Professor Robert D. Clark Honors College & Department of Earth Sciences 1293 University of Oregon Eugene, OR 97403-1293 Educational Background: B.A. Physics & Astronomy 2001 Bryn Mawr College Ph.D. Earth & Space Sciences 2006 University of Washington (Advisor: R. Winglee) Employment History: Undergraduate Teaching Assistant, Bryn Mawr College, Physics 1998-2001 Graduate Teaching Assistant, University of Washington, Earth & Space Sciences 2002-2005 Graduate Research Assistant, University of Washington, Earth & Space Sciences 2001-2006 Instructor, Chautauqua Course on Space Weather & Planetary Magnetospheres 2006 (Summer) Postdoctoral Researcher, Southwest Research Institute, Space Science & Engineering 2006-2008 Assistant Professor, Georgia Institute of Technology, Earth & Atmospheric Science 2008-2014 Associate Professor, Georgia Institute of Technology, Earth & Atmospheric Science 2014-2018 Associate Professor, University of Oregon, Clark Honors College & Earth Sciences 2018-present Current Research Interests: Space Plasma Physics, Planetary Magnetospheres, Planetary Upper Atmospheres/Ionospheres, Icy Satellites, Dusty Plasmas, Mars Atmospheric Evolution, Astrobiology, Mission Planning Activities (Cassini, Jupiter Icy Moon Explorer: JUICE, Europa Clipper Mission, Trident, Odyssey PMCS) Synergistic Activities: National Academy of Sciences – Ocean Worlds and Dwarf Planets Panel for the ‘Planetary Science and Astrobiology Decadal Survey 2023-2032’ October 2020 – present Icarus Editor 2017-present Outer -
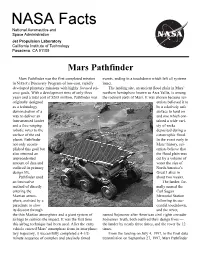
Mars Pathfinder
NASA Facts National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 Mars Pathfinder Mars Pathfinder was the first completed mission events, ending in a touchdown which left all systems in NASAs Discovery Program of low-cost, rapidly intact. developed planetary missions with highly focused sci- The landing site, an ancient flood plain in Mars ence goals. With a development time of only three northern hemisphere known as Ares Vallis, is among years and a total cost of $265 million, Pathfinder was the rockiest parts of Mars. It was chosen because sci- originally designed entists believed it to as a technology be a relatively safe demonstration of a surface to land on way to deliver an and one which con- instrumented lander tained a wide vari- and a free-ranging ety of rocks robotic rover to the deposited during a surface of the red catastrophic flood. planet. Pathfinder In the event early in not only accom- Mars history, sci- plished this goal but entists believe that also returned an the flood plain was unprecedented cut by a volume of amount of data and water the size of outlived its primary North Americas design life. Great Lakes in Pathfinder used about two weeks. an innovative The lander, for- method of directly mally named the entering the Carl Sagan Martian atmos- Memorial Station phere, assisted by a following its suc- parachute to slow cessful touchdown, its descent through and the rover, the thin Martian atmosphere and a giant system of named Sojourner after American civil rights crusader airbags to cushion the impact. -
![The Strength of Regolith and Rubble Pile Asteroids Arxiv:1306.1622V2 [Astro-Ph.EP] 5 Mar 2014](https://docslib.b-cdn.net/cover/2323/the-strength-of-regolith-and-rubble-pile-asteroids-arxiv-1306-1622v2-astro-ph-ep-5-mar-2014-1322323.webp)
The Strength of Regolith and Rubble Pile Asteroids Arxiv:1306.1622V2 [Astro-Ph.EP] 5 Mar 2014
The Strength of Regolith and Rubble Pile Asteroids∗ P. S´anchez and D.J. Scheeres The University of Colorado at Boulder Abstract We explore the hypothesis that, due to small van der Waals forces between constituent grains, small rubble pile asteroids have a small but non-zero cohesive strength. The nature of this model predicts that the cohesive strength should be constant independent of aster- oid size, which creates a scale dependence with relative strength in- creasing as size decreases. This model counters classical theory that rubble pile asteroids should behave as scale-independent cohesionless collections of rocks. We explore a simple model for asteroid strength that is based on these weak forces, validate it through granular me- chanics simulations and comparisons with properties of lunar regolith, and then explore its implications and ability to explain and predict observed properties of small asteroids in the NEA and Main Belt pop- ulations, and in particular of asteroid 2008 TC3. One conclusion is that the population of rapidly rotating asteroids could consist of both distributions of smaller grains (i.e., rubble piles) and of monolithic boulders. arXiv:1306.1622v2 [astro-ph.EP] 5 Mar 2014 1 Introduction The strength and morphology of small asteroids in the solar system remains an open and fundamentally interesting scientific issue. The strength of a rubble pile body will control how fast it can rotate before shedding mass or disrupting, influence the process by which binary asteroids are created, and ∗Accepted in Meteoritics and Planetary Science, 2/2014. 1 could have significance for the mitigation of hazardous near-Earth asteroids (NEA) should this be necessary in the future. -

Krista Marie Soderlund the University of Texas at Austin Institute for Geophysics, John A
Krista Marie Soderlund The University of Texas at Austin Institute for Geophysics, John A. & Katherine G. Jackson School of Geosciences J.J. Pickle Research Campus, Bldg. 196 (ROC), 10100 Burnet Rd. (R2200), Austin, TX 78758-4445 [email protected], Office: 512-471-0449, Cell: 218-349-3006, FAX: 512-471-8844 Research Interests Geophysical Fluid Dynamics, Magnetohydrodynamics, Planetary Science, Cryosphere Education University of California, Los Angeles Ph.D., Geophysics and Space Physics, 2011 M.S., Geophysics and Space Physics, 2009 Florida Institute of Technology B.S., Double major in Physics & Space Science, 2005, Summa Cum Laude Employment University of Texas at Austin, Institute for Geophysics Research Associate, September 2014-Present UTIG Postdoctoral Fellow, October 2011-September 2014 University of California, Los Angeles, Department of Earth and Space Sciences Graduate Student Researcher, Advisor: Dr. Jonathan M. Aurnou, 2006-2011 California Institute of Technology, Division of Geological and Planetary Sciences Summer Undergraduate Research Fellow, Dr. Joann M. Stock, 2005 NASA Jet Propulsion Laboratory, CA Consultant, Dr. Bonnie J. Buratti, 2006 Planetary Geology & Geophysics Undergrad Research Program, Dr. B.J. Buratti, 2004 Florida Institute of Technology, Department of Physics and Space Science Undergraduate Researcher, Dr. Niescja E. Turner, 2004-2005 Naval Oceanographic Office, Hydrology Code, Stennis Space Center, MS Physical science aid, 2003 Mission Experience Saturn Probe Interior and aTmosphere Explorer (SPRITE) -

Bare-Tether Missions Paradigm for Exploration of Oceanworlds in Plumes of Icy Moons Enceladus, Europa, and Triton
Bare-Tether Missions Paradigm for Exploration of OceanWorlds in Plumes of Icy Moons Enceladus, Europa, and Triton Juan R. Sanmartin 34 + 910675922 Universidad Politécnica de Madrid / Emerito Real Academia de Ingeniería [email protected] I.- Introduction The case of Ice Giants, which only received flyby missions, is of particular interest as regards exploration. There are multiple issues of interest in exploring Uranus and Neptune as different from Gas Giants: Composition is definitely different; rocky mass-percent is much larger; both planetary dynamics and magnetic structures present striking differences (quite relevant for tether interaction); exoplanet statistics suggests Ice types are well more abundant than Gas types. This raises questions about exomoons and exomagnetics… As regards considering tethers for a Neptune mission, beyond just a flyby, there would seem to exist a basic problem with standard methods. The Introduction section of NASA’s “Ice Giants” Pre-Decadal Mission Study Report, JPL D-100520, June 2017 (529 pp), in Sec.2.3.3, recalls the multiple studies, over the last half-century, on mission design options for exploration of Uranus and Neptune, ranging from just chemical propulsion to electric propulsion, both with and without gravity assists, and a variety of mission architectural concepts. First, such faraway missions appear quite costly. In the Report the estimated cost of a Flagship Neptune mission was $1.972B, $300M less for Uranus, whereas total budget for both planets was $2B. Secondly, available solar power is practically nil in a large part of the trip, spacecraft capture by chemical propulsion leading to high wet-mass, with scientific load limited to a small mass fraction, and orbital maneuvers quite reduced after capture. -

William A. Hiscock Michio Kaku Gordon Kane J-M Wersinger
WILLIAM A. HISCOCK From Wormholes to the Warp Drive: Using Theoretical Physics to Place Ultimate Bounds on Technology MICHIO KAKU M-Theory: Mother of All Superstrings GORDON KANE Anthropic Questions Peering into the Universe: Images from the Hubble Space Telescope J-M WERSINGER The National Space Grant Student Satellite Program: Crawl, Walk, Run, Fly! The Honor Society of Phi Kappa Phi was founded in 1897 and became a national organization Board of Directors through the efforts of the presidents of three state Wendell H. McKenzie, PhD universities. Its primary objective has been from National President the first the recognition and encouragement of Dept. of Genetics superior scholarship in all fields of study. Good Box 7614 NCSU character is an essential supporting attribute for Raleigh, NC 27695 those elected to membership. The motto of the Paul J. Ferlazzo, PhD Society is philosophia krateit¯oph¯ot¯on, which is National President-Elect freely translated as “Let the love of learning rule Northern Arizona University Phi Kappa Phi Forum Staff humanity.” Dept. of English, Bx 6032 Flagstaff, AZ 86011 Editor: JAMES P. KAETZ Donna Clark Schubert National Vice President Associate Editors: Troy State University Phi Kappa Phi encourages and recognizes aca- 101 C Wallace Hall STEPHANIE J. BOND demic excellence through several national pro- Troy, AL 36082 LAURA J. KLOBERG grams. Its flagship National Fellowship Program now awards more than $460,000 each year to Neil R. Luebke, PhD Copy Editor: student members for the first year of graduate Past President 616 W. Harned Ave. AMES ARRS study. In addition, the Society funds Study J T. -
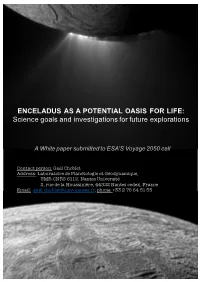
ENCELADUS AS a POTENTIAL OASIS for LIFE: Science Goals and Investigations for Future Explorations
ENCELADUS AS A POTENTIAL OASIS FOR LIFE: Science goals and investigations for future explorations A White paper submitted to ESA’S Voyage 2050 call Contact person: Gaël Choblet Address: Laboratoire de Planétologie et Géodynamique, UMR-CNRS 6112, Nantes Université 2, rue de la Houssinière, 44322 Nantes cedex, France Email: gaë[email protected]; phone: +33 2 76 64 51 55 ENCELADUS AS A POTENTIAL OASIS FOR LIFE Core proposing team Gaël Choblet Arnaud Buch LPG, Univ. Nantes/CNRS, France CentraleSupélec, France Ondrej Cadek Eloi Camprubi-Casas Charles Univ. Prague, Czech Rep. Utrecht University, Netherlands Caroline Freissinet Matt Hedman LATMOS, UVSQ/CNRS, France University of Idaho, USA Geraint Jones Valery Lainey Mullard Space Science Lab, UK Obs. Paris, France Alice Le Gall Alice Lucchetti LATMOS, UVSQ/CNRS, France INAF-OAPD, Italy Shannon MacKenzie Giuseppe Mitri JHU-APL, USA IRSPS InGeo Univ. d’Annunzio, Italy Marc Neveu Francis Nimmo NASA Goddard Space Flight Ctr., USA University of California Santa Cruz, USA Karen Olsson-Francis Mark Panning Open University, UK JPL-Caltech, USA Joachim Saur Frank Postberg Univ. Köln, Germany Frei Univ. Berlin, Germany Jürgen Schmidt Takazo Shibuya Oulu University, Finland JAMSTEC, Japan Yasuhito Sekine Christophe Sotin ELSI, Japan JPL-Caltech, USA Gabriel Tobie Ondrej Soucek LPG, Univ. Nantes/CNRS, France Charles Univ. Prague, Czech Rep. Steve Vance Cyril Szopa JPL-Caltech, USA LATMOS, UVSQ/CNRS, France Laurie Barge Usui Tomohiro JPL-Caltech, USA ISAS/JAXA, Japan Marie Behounkova Tim Van Hoolst Charles Univ. Prague, Czech Rep. Royal Observatory, Belgium ENCELADUS AS A POTENTIAL OASIS FOR LIFE EXECUTIVE SUMMARY: Enceladus is the first planetary object for which direct sampling of a subsurface water reservoir, likely habitable, has been performed. -
Relating to the Real
BALTIC WORLDSBALTIC A scholarly journal and news magazine. December 2016. Vol. IX:4. From the Centre for Baltic and East European Studies (CBEES), Södertörn University. New excerpt by award-winning Lithuanian writer December 2016. Vol. IX:4 BALTIC WORLDSbalticworlds.com Relating to the real Special section: Perspectives and narratives on socialist realism Adorno’s concept of realism Nabokov and cinematic realism Gaidar and the fostering of socialists The truth and the real Special section: Special Translations of reality in Soviet literature Lapin on history writing Swedish painters’ interpretations of realism Perspectives and narratives on socialist realism. socialist on narratives and Perspectives also in this issue Illustration: Karin Sunvisson WAR ON DRUGS IN RUSSIA / FEMINISM ON NEOLIBERALISM / ANTI-SEMITISM IN POLAND / EXILE COMMUNITIES Sponsored by the Foundation BALTIC for Baltic and East European Studies contents 3 colophon WORLDSbalticworlds.com Baltic Worlds is published by the Centre for Baltic and East European Studies (CBEES) at Södertörn University, Sweden. editorial in this issue Editor-in-chief Ninna Mörner Publisher Joakim Ekman Social reality & socialist realism Scholarly advisory council Thomas Andrén, Södertörn hen in daily life we speak of appear differently from another University; Sari Autio-Sarasmo, “reality”, we often use the word angle. In this issue we devote a Aleksanteri Institute, Helsinki; to refer to harsh circumstances substantial section to the dogmas Sofie Bedford, UCRS, Uppsala and the darker side of society. It and ambiguities of the real, and interview reviews University; Michael Gentile, Wseems to be something raw and confined to hid- our guest editor Tora Lane has Helsinki University; Markus Huss, 4 Lithuanian writer. -

Quantification of Mineral Abundances in Binary Mixtures Using Raman Spectroscopy and Multivariate Analysis
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 1754.pdf QUANTIFICATION OF MINERAL ABUNDANCES IN BINARY MIXTURES USING RAMAN SPECTROSCOPY AND MULTIVARIATE ANALYSIS. L. B. Breitenfeld1, M. D. Dyar2, and C. Tremblay2, 1Stony Brook University, Dept. of Geosciences, Stony Brook, NY 11794, [email protected], 2Mount Holyoke College, Dept. of Astronomy, South Hadley, MA, 01075. Introduction: Three styles of Raman instruments cy, we report here a sample library (Figure 1) and will arrive imminently on the surface of Mars. The spectral database consisting of fine-grained binary mix- ExoMars RLS instrument will use a 532 nm laser to tures using 38 pure mineral phases. We then test how probe powdered samples obtained by a drill [1]. Mars well individual mineral abundances can be determined 2020’s SHERLOC will utilize deep ultraviolet reso- using multivariate analysis. nance to scan habitable environments for organics and Background: Quantitative relationships between chemicals with Raman and luminescence [2]. Super- peak area and mineral abundance are obscured by Cam (also on Mars 2020) will interrogate surface ma- many complicating factors in Raman spectroscopy: the terials with a 532 nm laser at long ranges [3]. exciting laser wavelength, the Raman cross-section of The success of these instruments relies on availabil- the minerals (dependent on the strength of covalent ity of appropriate databases and software for phase bonding and polarizability of the molecule), crystal identification at relevant scales. The ~50 µm beam size orientation relative to laser polarization, and long- of RLS and SHERLOC is small enough to primarily range chemical and structural ordering in the crystal probe individual mineral phases, but the 1.3 mm beam lattices [5]. -

Spaceflight Mechanics 2019
SPACEFLIGHT MECHANICS 2019 1 AAS PRESIDENT Carol S. Lane Cynergy, LLC VICE PRESIDENT - PUBLICATIONS James V. McAdams KinetX Inc. EDITORS Dr. Francesco Topputo Politecnico di Milano Dr. Andrew J. Sinclair Air Force Research Laboratory Dr. Matthew P. Wilkins L3 Advanced Defense Solutions Dr. Renato Zanetti The University of Texas at Austin SERIES EDITOR Robert H. Jacobs Univelt, Incorporated Front Cover Images: This photograph shows the partly-illuminated Earth rising over the lunar horizon. The lunar terrain shown, centered at 85 degrees east longitude and 3 degrees north latitude on the nearside of the Moon is in the area of Smyth’s Sea. The Earth is approximately 400,000 km away. Credit: NASA Photo (Apollo 11, AS11-44-6552). 2 SPACEFLIGHT MECHANICS 2019 Volume 168 ADVANCES IN THE ASTRONAUTICAL SCIENCES Edited by Francesco Topputo Andrew J. Sinclair Matthew P. Wilkins Renato Zanetti Proceedings of the AAS/AIAA Space Flight Mechanics Meeting held January 13–17, 2019, Ka’anapali, Maui, Hawaii, U.S.A. Published for the American Astronautical Society by Univelt, Incorporated, P.O. Box 28130, San Diego, California 92198 Web Site: http://www.univelt.com 3 Copyright 2019 by AMERICAN ASTRONAUTICAL SOCIETY AAS Publications Office P.O. Box 28130 San Diego, California 92198 Affiliated with the American Association for the Advancement of Science Member of the International Astronautical Federation First Printing 2019 Library of Congress Card No. 57-43769 ISSN 1081-6003 ISBN 978-0-87703-659-3 (Hard Cover Plus CD ROM) ISBN 978-0-87703-660-9 (Digital Version) Published for the American Astronautical Society by Univelt, Incorporated, P.O.