Arxiv:0704.0095V2 [Math.GR] 10 Apr 2012 > C Ercsbe Ω Subset Metric Etha Measure Haar Left 1.1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rigidity of Quasiconformal Maps on Carnot Groups
RIGIDITY OF QUASICONFORMAL MAPS ON CARNOT GROUPS Mark Medwid A Dissertation Submitted to the Graduate College of Bowling Green State University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY August 2017 Committee: Xiangdong Xie, Advisor Alexander Tarnovsky, Graduate Faculty Representative Mihai Staic Juan Bes´ Copyright c August 2017 Mark Medwid All rights reserved iii ABSTRACT Xiangdong Xie, Advisor Quasiconformal mappings were first utilized by Grotzsch¨ in the 1920’s and then later named by Ahlfors in the 1930’s. The conformal mappings one studies in complex analysis are locally angle-preserving: they map infinitesimal balls to infinitesimal balls. Quasiconformal mappings, on the other hand, map infinitesimal balls to infinitesimal ellipsoids of a uniformly bounded ec- centricity. The theory of quasiconformal mappings is well-developed and studied. For example, quasiconformal mappings on Euclidean space are almost-everywhere differentiable. A result due to Pansu in 1989 illustrated that quasiconformal mappings on Carnot groups are almost-everywhere (Pansu) differentiable, as well. It is easy to show that a biLipschitz map is quasiconformal but the converse does not hold, in general. There are many instances, however, where globally defined quasiconformal mappings on Carnot groups are biLipschitz. In this paper we show that, under cer- tain conditions, a quasiconformal mapping defined on an open subset of a Carnot group is locally biLipschitz. This result is motivated by rigidity results in geometry (for example, the theorem by Mostow in 1968). Along the way we develop background material on geometric group theory and show its connection to quasiconformal mappings. iv ACKNOWLEDGMENTS I would like to acknowledge, first and foremost, my wife, Heather. -

Casimir Functions of Free Nilpotent Lie Groups of Steps Three and Four
Casimir functions of free nilpotent Lie groups of steps three and four∗ A. V. Podobryaev A.K. Ailamazyan Program Systems Institute of RAS [email protected] June 2, 2020 Abstract Any free nilpotent Lie algebra is determined by its rank and step. We consider free nilpotent Lie algebras of steps 3, 4 and corresponding connected and simply connected Lie groups. We construct Casimir functions of such groups, i.e., invariants of the coadjoint representation. For free 3-step nilpotent Lie groups we get a full description of coadjoint orbits. It turns out that general coadjoint orbits are affine subspaces, and special coadjoint orbits are affine subspaces or direct products of nonsingular quadrics. The knowledge of Casimir functions is useful for investigation of integration properties of dynamical systems and optimal control problems on Carnot groups. In particular, for some wide class of time-optimal problems on 3-step free Carnot groups we conclude that extremal controls corresponding to two-dimensional coad- joint orbits have the same behavior as in time-optimal problems on the Heisenberg group or on the Engel group. Keywords: free Carnot group, coadjoint orbits, Casimir functions, integration, geometric control theory, sub-Riemannian geometry, sub-Finsler geometry. AMS subject classification: 22E25, 17B08, 53C17, 35R03. Introduction The goal of this paper is a description of Casimir functions and coadjoint orbits for arXiv:2006.00224v1 [math.DG] 30 May 2020 some class of nilpotent Lie groups. This knowledge is important for the theory of left- invariant optimal control problems on Lie groups [1]. Casimir functions are integrals of the Hamiltonian system of Pontryagin maximum principle. -

Non-Minimality of Corners in Subriemannian Geometry
NON-MINIMALITY OF CORNERS IN SUBRIEMANNIAN GEOMETRY EERO HAKAVUORI AND ENRICO LE DONNE Abstract. We give a short solution to one of the main open problems in subrie- mannian geometry. Namely, we prove that length minimizers do not have corner- type singularities. With this result we solve Problem II of Agrachev's list, and provide the first general result toward the 30-year-old open problem of regularity of subriemannian geodesics. Contents 1. Introduction 1 1.1. The idea of the argument 2 1.2. Definitions 3 2. Preliminary lemmas 4 3. The main result 6 3.1. Reduction to Carnot groups 6 3.2. The inductive non-minimality argument 7 References 9 1. Introduction One of the major open problems in subriemannian geometry is the regularity of length-minimizing curves (see [Mon02, Section 10.1] and [Mon14b, Section 4]). This problem has been open since the work of Strichartz [Str86, Str89] and Hamenst¨adt [Ham90]. Contrary to Riemannian geometry, where it is well known that all length minimizers are C1-smooth, the problem in the subriemannian case is significantly more difficult. The primary reason for this difficulty is the existence of abnormal curves (see [AS04, Date: March 8, 2016. 2010 Mathematics Subject Classification. 53C17, 49K21, 28A75. Key words and phrases. Corner-type singularities, geodesics, sub-Riemannian geometry, Carnot groups, regularity of length minimizers. 1 2 EERO HAKAVUORI AND ENRICO LE DONNE ABB15]), which we know may be length minimizers since the work of Montgomery [Mon94]. Nowadays, many more abnormal length minimizers are known [BH93, LS94, LS95, GK95, Sus96]. Abnormal curves, when parametrized by arc-length, need only have Lipschitz- regularity (see [LDLMV14, Section 5]), which is why, a priori, no further regular- ity can be assumed from an arbitrary length minimizer in a subriemannian space. -

Measure Contraction Properties of Carnot Groups Luca Rizzi
Measure contraction properties of Carnot groups Luca Rizzi To cite this version: Luca Rizzi. Measure contraction properties of Carnot groups . Calculus of Variations and Partial Differential Equations, Springer Verlag, 2016, 10.1007/s00526-016-1002-y. hal-01218376v3 HAL Id: hal-01218376 https://hal.archives-ouvertes.fr/hal-01218376v3 Submitted on 21 May 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. MEASURE CONTRACTION PROPERTIES OF CARNOT GROUPS RIZZI LUCA Abstract. We prove that any corank 1 Carnot group of dimension k + 1 equipped with a left-invariant measure satisfies the MCP(K, N) if and only if K ≤ 0 and N ≥ k + 3. This generalizes the well known result by Juillet for the Heisenberg group Hk+1 to a larger class of structures, which admit non-trivial abnormal minimizing curves. The number k + 3 coincides with the geodesic dimension of the Carnot group, which we define here for a general metric space. We discuss some of its properties, and its relation with the curvature exponent (the least N such that the MCP(0,N) is satisfied). We prove that, on a metric measure space, the curvature exponent is always larger than the geodesic dimension which, in turn, is larger than the Hausdorff one. -

On Logarithmic Sobolev Inequalities for the Heat Kernel on The
ON LOGARITHMIC SOBOLEV INEQUALITIES FOR THE HEAT KERNEL ON THE HEISENBERG GROUP MICHEL BONNEFONT, DJALIL CHAFAÏ, AND RONAN HERRY Abstract. In this note, we derive a new logarithmic Sobolev inequality for the heat kernel on the Heisenberg group. The proof is inspired from the historical method of Leonard Gross with the Central Limit Theorem for a random walk. Here the non commutative nature of the increments produces a new gradient which naturally involves a Brownian bridge on the Heisenberg group. This new inequality contains the optimal logarithmic Sobolev inequality for the Gaussian distribution in two dimensions. We compare this new inequality with the sub- elliptic logarithmic Sobolev inequality of Hong-Quan Li and with the more recent inequality of Fabrice Baudoin and Nicola Garofalo obtained using a generalized curvature criterion. Finally, we extend this inequality to the case of homogeneous Carnot groups of rank two. Résumé. Dans cette note, nous obtenons une inégalité de Sobolev logarithmique nouvelle pour le noyau de la chaleur sur le groupe de Heisenberg. La preuve est inspirée de la méthode historique de Leonard Gross à base de théorème limite central pour une marche aléatoire. Ici la nature non commutative des incréments produit un nouveau gradient qui fait intervenir naturellement un pont brownien sur le groupe de Heisenberg. Cette nouvelle inégalité contient l’inégalité de Sobolev logarithmique optimale pour la mesure gaussienne en deux dimensions. Nous comparons cette nouvelle inégalité avec l’inégalité sous-elliptique de Hong-Quan Li et avec les inégalités plus récentes de Fabrice Beaudoin et Nicola Garofalo obtenues avec un critère de courbure généralisé. -

Conformal and Cr Mappings on Carnot Groups
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY, SERIES B Volume 7, Pages 67–81 (June 17, 2020) https://doi.org/10.1090/bproc/48 CONFORMAL AND CR MAPPINGS ON CARNOT GROUPS MICHAEL G. COWLING, JI LI, ALESSANDRO OTTAZZI, AND QINGYAN WU (Communicated by Jeremy Tyson) Abstract. We consider a class of stratified groups with a CR structure and a compatible control distance. For these Lie groups we show that the space of conformal maps coincide with the space of CR and anti-CR diffeomorphisms. Furthermore, we prove that on products of such groups, all CR and anti-CR maps are product maps, up to a permutation isomorphism, and affine in each component. As examples, we consider free groups on two generators, and show that these admit very simple polynomial embeddings in CN that induce their CR structure. 1. Introduction In this article, we consider the interplay between metric and complex geometry on some model manifolds. This is the first outcome of a larger project which aims to develop a unified theory of conformal and CR structures on the one hand, and to define explicit polynomial embeddings of certain CR manifolds into Cn on the other. This kind of embedding is what permits the detailed analysis of the ∂b operator carried out by Stein and his collaborators since the 1970s (see [6]). The analogy between CR and conformal geometry is well documented in the case of CR manifolds of hypersurface-type, see, e.g., [7,10–14,17]. The easiest and perhaps the most studied example in this setting is that of the Heisenberg group, taken with its sub-Riemannian structure. -
![Arxiv:1604.08579V1 [Math.MG] 28 Apr 2016 ..Caatrztoso I Groups Lie of Characterizations 5.1](https://docslib.b-cdn.net/cover/9363/arxiv-1604-08579v1-math-mg-28-apr-2016-caatrztoso-i-groups-lie-of-characterizations-5-1-2729363.webp)
Arxiv:1604.08579V1 [Math.MG] 28 Apr 2016 ..Caatrztoso I Groups Lie of Characterizations 5.1
A PRIMER ON CARNOT GROUPS: HOMOGENOUS GROUPS, CC SPACES, AND REGULARITY OF THEIR ISOMETRIES ENRICO LE DONNE Abstract. Carnot groups are distinguished spaces that are rich of structure: they are those Lie groups equipped with a path distance that is invariant by left-translations of the group and admit automorphisms that are dilations with respect to the distance. We present the basic theory of Carnot groups together with several remarks. We consider them as special cases of graded groups and as homogeneous metric spaces. We discuss the regularity of isometries in the general case of Carnot-Carathéodory spaces and of nilpotent metric Lie groups. Contents 0. Prototypical examples 4 1. Stratifications 6 1.1. Definitions 6 1.2. Uniqueness of stratifications 10 2. Metric groups 11 2.1. Abelian groups 12 2.2. Heisenberg group 12 2.3. Carnot groups 12 2.4. Carnot-Carathéodory spaces 12 2.5. Continuity of homogeneous distances 13 3. Limits of Riemannian manifolds 13 arXiv:1604.08579v1 [math.MG] 28 Apr 2016 3.1. Tangents to CC-spaces: Mitchell Theorem 14 3.2. Asymptotic cones of nilmanifolds 14 4. Isometrically homogeneous geodesic manifolds 15 4.1. Homogeneous metric spaces 15 4.2. Berestovskii’s characterization 15 5. A metric characterization of Carnot groups 16 5.1. Characterizations of Lie groups 16 Date: April 29, 2016. 2010 Mathematics Subject Classification. 53C17, 43A80, 22E25, 22F30, 14M17. This essay is a survey written for a summer school on metric spaces. 1 2 ENRICO LE DONNE 5.2. A metric characterization of Carnot groups 17 6. Isometries of metric groups 17 6.1. -

A Maximum Principle in the Engel Group James Klinedinst University of South Florida, [email protected]
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 4-4-2014 A Maximum Principle in the Engel Group James Klinedinst University of South Florida, [email protected] Follow this and additional works at: https://scholarcommons.usf.edu/etd Part of the Mathematics Commons Scholar Commons Citation Klinedinst, James, "A Maximum Principle in the Engel Group" (2014). Graduate Theses and Dissertations. https://scholarcommons.usf.edu/etd/5248 This Thesis is brought to you for free and open access by the Graduate School at Scholar Commons. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. A Maximum Principle in the Engel Group by James Klinedinst A thesis submitted in partial fulfillment of the requirements for the degree of Master of Arts Department of Mathematics & Statistics College of Arts and Sciences University of South Florida Major Professor: Thomas Bieske, Ph.D. Razvan Teodorescu, Ph.D. Seung-Yeop Lee, Ph.D. Date of Approval: April 04, 2014 Keywords: Viscosity Solutions, Partial Differential Equations, Carnot Groups, Heisenberg Group Copyright c 2014, James Klinedinst Dedication This work is dedicated to my son, Blaise. May his discov- eries be even better. Table of Contents Abstract . ii Chapter 1 Background on the Engel Environment . 1 Chapter 2 Carnot Jets and Viscosity Solutions . 10 Chapter 3 Sub-Riemannian Maximum Principle . 14 References . 26 i Abstract In this thesis, we will examine the properties of subelliptic jets in the Engel group of step 3. Step-2 groups, such as the Heisenberg group, do not provide insight into the general abstract calculations. -
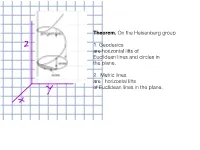
Heisenberg Copy Theorem. on the Heisenberg Group 1. Geodesics Are
Theorem. On the Heisenberg group Z 1. Geodesics are horizontal lifts of Euclidean lines and circles in the plane. heisenberg copy 2. Metric lines are horizontal lifts of Euclidean lines in the plane. Y x 3 as a manifold: R as a metric space: x Call a smooth path c(t) = (x(t), y(t),dyed z(t)) ``horizontal’’ if : dz 1 dx dy = (x(t) O y(t) O) dt 2 dt − dt and call the length of such a path : b dx 2 dy 2 `(c):= dx2 + dy2 := + dt c a s dt dt Z p Z Then d(A, B) = inf { length of c: c horizontal, c joins A to B } as a Lie group: (x,y,z)(x’, y’, z’) = (x + x’, y+ y’, z+ z’) + (0,0, (1/2)(xy’ - yx’)) d is a left-invariant metric on the Heisenberg group: d(gA, gB) = d(A, B) The projection 3 2 ⇡ : R R ; ⇡(x, y, z)=(x, y) ! is a submetry: DEF: a submetry is an onto map F between metric spaces such that F(B(p, r)) = B(F (p ), r) `(c)=` 2 (⇡(c)) = ⇡ is a submetry R ) center 0,921 horn spaces t f I c h8 IT r R2 c is the horizontal lift of γ γ(t)=(x(t),y(t)) = c(t)=(x(t),y(t),z(t)) where ) dz 1 dy dx = (x(t) y(t) ) dt 2 dt − dt Theorem. On the Heisenberg group Z 1. Geodesics are horizontal lifts of Euclidean lines and circles in the plane. -

A Primer on Carnot Groups
Anal. Geom. Metr. Spaces 2017; 5:116–137 Survey Paper Open Access Enrico Le Donne* A Primer on Carnot Groups: Homogenous Groups, Carnot-Carathéodory Spaces, and Regularity of Their Isometries https://doi.org/10.1515/agms-2017-0007 Received November 18, 2016; revised September 7, 2017; accepted November 8, 2017 Abstract: Carnot groups are distinguished spaces that are rich of structure: they are those Lie groups equipped with a path distance that is invariant by left-translations of the group and admit automorphisms that are dilations with respect to the distance. We present the basic theory of Carnot groups together with several remarks. We consider them as special cases of graded groups and as homogeneous metric spaces. We discuss the regularity of isometries in the general case of Carnot-Carathéodory spaces and of nilpotent metric Lie groups. Keywords: Carnot groups, sub-Riemannian geometry, sub-Finsler geometry, homogeneous spaces, homoge- neous groups, nilpotent groups, metric groups MSC: 53C17, 43A80, 22E25, 22F30, 14M17. Carnot groups are special cases of Carnot-Carathéodory spaces associated with a system of bracket-generating vector elds. In particular, they are geodesic metric spaces. Carnot groups are also examples of homogeneous groups and stratied groups. They are simply connected nilpotent groups and their Lie algebras admit special gradings: stratications. The stratication can be used to dene a left-invariant metric on each group in such a way that the group is self-similar with respect to this metric. Namely, there is a natural family of dilations on the group under which the metric behaves like the Euclidean metric under Euclidean dilations. -

NILPOTENT GROUPS WITHOUT EXACTLY POLYNOMIAL DEHN FUNCTION 3 Suitable Subspace
NILPOTENT GROUPS WITHOUT EXACTLY POLYNOMIAL DEHN FUNCTION STEFAN WENGER Abstract. We prove super-quadratic lower bounds for the growth of the filling area func- tion of a certain class of Carnot groups. This class contains groups for which it is known that their Dehn function grows no faster than n2 log n. We therefore obtain the existence of (finitely generated) nilpotent groups whose Dehn functions do not have exactly polynomial growth and we thus answer a well-known question about the possible growth rate of Dehn functions of nilpotent groups. 1. Introduction Dehn functions have played an important role in geometric group theory. They measure the complexity of the word problem in a given finitely presented group and provide a quasi- isometry invariant of the group. A class of groups for which the Dehn function has been well-studied is that of nilpotent groups. Many results on upper bounds for the growth of the Dehn function are known, while fewer techniques have been found for obtaining lower bounds. Here are some known results: if Γ is a finitely generated nilpotent group of step c c+1 c+1 then its Dehn function δΓ(n) grows no faster than n , in short δΓ(n) n , [12, 20, 9]. If c+1 Γ is a free nilpotent group of step c then δΓ(n) ∼ n , [5, 21]. This includes the particular case of the first Heisenberg group, which was known before, see [8]. For the definition of δΓ(n) and the meaning of and ∼ see Section 2. The higher Heisenberg groups have quadratic Dehn functions, [12, 1, 16]. -

Spectral Triples on Carnot Manifolds
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Institutionelles Repositorium der Leibniz Universität Hannover Spectral Triples on Carnot Manifolds Von der Fakult¨atf¨ur Mathematik und Physik der Gottfried Wilhelm Leibniz Universit¨atHannover zur Erlangung des Grades Doktor der Naturwissenschaften Dr. rer. nat. genehmigte Dissertation von Dipl.Math. Stefan Hasselmann geboren am 12.04.1981 in Ibbenb¨uren 2014 ii Referent: Prof. Dr. Christian B¨ar Koreferent: Prof. Dr. Elmar Schrohe Tag der Promotion: 18.10.2013 Abstract We analyze whether one can construct a spectral triple for a Carnot manifold M, which detects its Carnot-Carath´eodory metric and its graded dimension. Therefore we construct self-adjoint horizontal Dirac operators DH and show that each horizontal Dirac operator detects the metric via Connes' formula, but we also find that in no case these operators are hypoelliptic, which means they fail to have a compact resolvent. First we consider an example on compact Carnot nilmanifolds in detail, where we present a construction for a horizontal Dirac operator arising via pullback from the Dirac operator on the torus. Following an approach by Christian B¨arto decompose the horizontal Clifford bundle, we detect that this operator has an infinite dimensional kernel. But in spite of this, in the case of Heisenberg nilmanifolds we will be able to discover the graded dimension from the asymptotic behavior of the eigenvalues of this horizontal Dirac operator. Afterwards we turn to the general case, showing that any horizontal Dirac operator fails to be hypoelliptic. Doing this, we develop a criterion from which hypoellipticity of certain graded differential operators can be excluded by considering the situation on a Heisenberg manifold, for which a complete characterization of hypoellipticity in known by the Rockland condition.