CPE 323: MSP430 Serial Communication
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Serial Communication Buses
Computer Architecture 10 Serial Communication Buses Made wi th OpenOffi ce.org 1 Serial Communication SendingSending datadata oneone bitbit atat oneone time,time, sequentiallysequentially SerialSerial vsvs parallelparallel communicationcommunication cable cost (or PCB space), synchronization, distance ! speed ? ImprovedImproved serialserial communicationcommunication technologytechnology allowsallows forfor transfertransfer atat higherhigher speedsspeeds andand isis dominatingdominating thethe modernmodern digitaldigital technology:technology: RS232, RS-485, I2C, SPI, 1-Wire, USB, FireWire, Ethernet, Fibre Channel, MIDI, Serial Attached SCSI, Serial ATA, PCI Express, etc. Made wi th OpenOffi ce.org 2 RS232, EIA232 TheThe ElectronicElectronic IndustriesIndustries AllianceAlliance (EIA)(EIA) standardstandard RS-232-CRS-232-C (1969)(1969) definition of physical layer (electrical signal characteristics: voltage levels, signaling rate, timing, short-circuit behavior, cable length, etc.) 25 or (more often) 9-pin connector serial transmission (bit-by-bit) asynchronous operation (no clock signal) truly bi-directional transfer (full-duplex) only limited power can be supplied to another device numerous handshake lines (seldom used) many protocols use RS232 (e.g. Modbus) Made wi th OpenOffi ce.org 3 Voltage Levels RS-232RS-232 standardstandard convertconvert TTL/CMOS-levelTTL/CMOS-level signalssignals intointo bipolarbipolar voltagevoltage levelslevels toto improveimprove noisenoise immunityimmunity andand supportsupport longlong cablecable lengthslengths TTL/CMOS → RS232: 0V = logic zero → +3V…+12V (SPACE) +5V (+3.3V) = logic one → −3V…−12V (MARK) Some equipment ignores the negative level and accepts a zero voltage level as the "OFF" state The "dead area" between +3V and -3V may vary, many receivers are sensitive to differentials of 1V or less Made wi th OpenOffi ce.org 4 Data frame CompleteComplete one-byteone-byte frameframe consistsconsists of:of: start-bit (SPACE), data bits (7, 8), stop-bits (MARK) e.g. -

A Gumstix-Based MIDI-To-OSC Converter
midOSC: a Gumstix-Based MIDI-to-OSC Converter Sebastien´ Schiesser Institute for Computer Music and Sound Technology Zurich University of the Arts Baslerstrasse 30, 8048 Zurich, Switzerland [email protected] Abstract [14], sent to the remote-controlled devices location and con- A MIDI-to-OSC converter is implemented on a commer- verted back to MIDI. Until now, this has been done at each cially available embedded linux system, tighly integrated conversion point through a Max/MSP patch running on a with a microcontroller. A layered method is developed which computer connected to a MIDI interface. This is very de- permits the conversion of serial data such as MIDI to OSC manding in terms of hardware: in the backstage system of formatted network packets with an overall system latency the mAe, a computer is dedicated to conversion purposes below 5 milliseconds for common MIDI messages. only. And when MIDI devices are present on stage, an ad- The Gumstix embedded computer provide an interest- ditional laptop with interface is required. ing and modular platform for the development of such an The mAe is intended to be modular and to support several embedded applications. The project shows great potential “I/O hubs”, where audio and control data are collected and to evolve into a generic sensors-to-OSC ethernet converter dispatched. In order to avoid dependence on a converting which should be very useful for artistic purposes and could computer at each hub, it seemed appropriate to use a dedi- be used as a fast prototyping interface for gesture acquisition cated converter which can run independently, be stacked in devices. -

Introduction to Serial Communication
Technical Tutorial Introduction to Serial Communication Introduction to Serial Communication Technical Tutorial 2002 – 12 - 06 Technical Tutorial Introduction to Serial Communication Table of Contents 1: Introduction 1.1. DCE and DTE Devices 1.2. Synchronous data transfer 1.3. Asynchronous data transfer 2: RS232 2.1. RS232 on DB9 (9-pin D-type connector) 2.2. RS232 on DB25 (25-pin D-type connector) 2.3. RS232 on RJ-45 2.4. Signal Description 2.5. Limitations of RS232 3: RS422 and RS485 3.1. RS422 Serial Communication 3.2. RS485 Serial Communication 3.3. Converters 4: Summary Table 5: Serial Interface of Sena Products 5.1. HelloDevice Lite series 5.2. HelloDevice Pro series 5.3. HelloDevice Super series 5.4. IALink100 Series 5.5. VTS Series 2 Technical Tutorial Introduction to Serial Communication 1. Introduction The purpose of this application note is to attempt to describe the main elements in Serial Communication. This application note attempts to cover enough technical details of RS232, RS422 and RS485. 1.1. DCE and DTE Devices DTE stands for Data Terminal Equipment, and DCE stands for Data Communications Equipment. These terms are used to indicate the pin-out for the connectors on a device and the direction of the signals on the pins. Your computer is a DTE device, while most other devices such as modem and other serial devices are usually DCE devices. RS-232 has been around as a standard for decades as an electrical interface between Data Terminal Equipment (DTE) and Data Circuit-Terminating Equipment (DCE) such as modems or DSUs. -

Lab 5: Serial Communication (Sci/Spi) and C Objectives Required Materials Introduction
University of Florida EEL 3744 –Spring 2018 Dr. Eric M. Schwartz Electrical & Computer Engineering Dept. 28-Mar-18 Page 1/8 Revision 7 LAB 5: SERIAL COMMUNICATION (SCI/SPI) AND C OBJECTIVES As discovered in Homework 4, the asynchronous UART • Understand the basic operation and structure of protocol utilizes a transfer rate (denoted as the baud rate), as asynchronous and synchronous serial communication, well as two physical connections for each device to i.e., SCI (UART) and SPI. communicate data, i.e., a pin for Receiving data (Rx), and a pin • Utilize C programming constructs to create functions to for Transmitting data (Tx). The only way that this protocol interact with the XMEGA’s USART and SPI systems. functions correctly is if both devices agree on a common baud • Learn how to use SPI communication to interact with an rate. external IMU sensor package. • Stream and plot real-time 3D (XYZ) acceleration data SPI, on the other hand, utilizes a shared clock signal connected using the XMEGA’s USART system and Atmel Studio’s between (at least) two devices (usually denoted as SCK), where Data Visualizer. only one device is known as the “master” device, and where the other devices are “slaves.” Full-duplex communication is REQUIRED MATERIALS possible with SPI (i.e., two devices can talk to each other at the • µPAD v2.0 Development Board same time), although the master always starts any • Robotics Backpack communication between the devices. When the master wants • Digilent/NI Analog Discovery (DAD/NAD) kit to transmit/receive data to/from the slave(s), it generates the • LSM330.h header file synchronized Serial Clock signal (SCK). -

EB215 Local Interconnect Network (LIN)
Freescale Semiconductor EB215 Engineering Bulletin Rev. 1.0, 03/2005 Local Interconnect Network (LIN) Physical Interface Difference Between MC33399 and MC33661 Introduction This engineering bulletin highlights the differences between two Local Interconnect Network (LIN) Physical Interfaces, namely the 33399 and the 33661. The LIN is a serial communication protocol designed to support automotive networks in conjunction with Controller Area Network (CAN). As the lowest level of a hierarchical network, LIN enables cost-effective communication with sensors and actuators when all the features of CAN are not required. The 33399 and the 33661 are physical layer components dedicated to automotive sub-bus applications. They offer speech communication from 1.0 kbps to 20 kbps. There are two main operating modes: Normal and Sleep. For feature information, refer to the device data sheets for 33399 and 33661 © Freescale Semiconductor, Inc., 2005. All rights reserved. Differences Guide Differences Guide This section should be used as a quick guide to determine the main differences between the devices in a similar family. Using Table 1, you can note the differences most relevant to your system/application. This engineering bulletin should be used in conjunction with the most recent specification for each device, to ensure that all differences have been captured. Table 1. Device Differences Parameter 33399 33661 LIN Protocol Specification Addresses LIN 1.3 Applications Addresses LIN 2.0 Applications Terminal Out and Package 8-terminal SOICN. 8-terminal SOICN. One baud rate operation: Two baud rate operations: Baud Rate Operation 1.0 kbps to 20 kbps • 1.0 kbps to 10 kbps • 1.0 kbps to 20 kbps Capable of: Capable of: Controlling an external switchable voltage • Controlling an external switchable voltage INH Output regulator. -
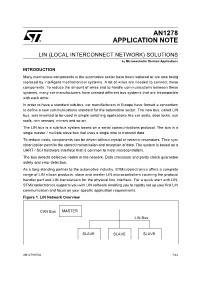
LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications
AN1278 APPLICATION NOTE LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications INTRODUCTION Many mechanical components in the automotive sector have been replaced or are now being replaced by intelligent mechatronical systems. A lot of wires are needed to connect these components. To reduce the amount of wires and to handle communications between these systems, many car manufacturers have created different bus systems that are incompatible with each other. In order to have a standard sub-bus, car manufacturers in Europe have formed a consortium to define a new communications standard for the automotive sector. The new bus, called LIN bus, was invented to be used in simple switching applications like car seats, door locks, sun roofs, rain sensors, mirrors and so on. The LIN bus is a sub-bus system based on a serial communications protocol. The bus is a single master / multiple slave bus that uses a single wire to transmit data. To reduce costs, components can be driven without crystal or ceramic resonators. Time syn- chronization permits the correct transmission and reception of data. The system is based on a UART / SCI hardware interface that is common to most microcontrollers. The bus detects defective nodes in the network. Data checksum and parity check guarantee safety and error detection. As a long-standing partner to the automotive industry, STMicroelectronics offers a complete range of LIN silicon products: slave and master LIN microcontrollers covering the protocol handler part and LIN transceivers for the physical line interface. For a quick start with LIN, STMicroelectronics supports you with LIN software enabling you to rapidly set up your first LIN communication and focus on your specific application requirements. -

Serial VS Parallel Interface
Serial VS Parallel Interface Newhaven Display International has LCDs, TFTs and OLEDs that offer both modes: parallel and serial. A multi-interface LCD board is designed to display information on the LCD using different parallel or serial protocol interfaces. Only one protocol will write to the LCD at a time. Some controller IC’s have more than one user-selectable interface option. No matter which protocol is being used to interface to the LCD, it must be initialized prior to normal use. Below you will learn more about parallel and serial interface so you may better understand what this means when deciding on a product. There are two ways of transmitting a byte between two digital devices. We can either transmit the byte in PARALLEL or we can transmit the byte in SERIAL form. The drawing to the left illustrates the differences between these two types of communication mechanisms. Transmitter Receiver In parallel mode, each bit has a single Transmitter Receiver wire devoted to it and all the bits are transmitted at the same time. In serial mode, the bits are transmitted as a Parallel interface transmits Serial interface transmits series of pulses. all bits in parallel a series of bits Goodwine, Bill. “Serial Communication.” 2002. University of Notre Dame. 22 Feb. 2012 <http://controls.ame.nd.edu/microcontroller/main/node22.html>. Serial Interface Parallel Interface (one bit at a time) (multiple bits at a time) Serial interface consists of an I2C bus, SPI bus, or synchronous serial Parallel interface consists of 8 data pins and 3 control lines. The control control and data lines. -
![Serial Communication [Modbus Version]](https://docslib.b-cdn.net/cover/2379/serial-communication-modbus-version-1412379.webp)
Serial Communication [Modbus Version]
ROBO CYLINDER Series PCON, ACON, SCON, ERC2 Serial Communication [Modbus Version] Operation Manual, Second Edition Introduction The explanations provided in this manual are limited to procedures of serial communication. Refer to the operation manual supplied with the ROBO Cylinder Controller (hereinafter referred to as RC controller) for other specifications, such as control, installation and connection. Caution (1) If any address or function not defined in this specification is sent to an RC controller, the controller may not operate properly or it may implement unintended movements. Do not send any function or address not specified herein. (2) RC controllers are designed in such a way that once the controller detects a break (space) signal of 150 msec or longer via its SIO port, it will automatically switch the baud rate to 9600 bps. On some PCs, the transmission line remains in the break (space) signal transmission mode while the communication port is closed. Exercise caution if one of these PCs is used as the host device, because the baud rate in your RC controller may have been changed to 9600 bps. (3) Set the communication speed and other parameters using IAI’s teaching tools (teaching pendant or PC software), and then transfer the specified parameters to the controller. (4) If the controller is used in a place meeting any of the following conditions, provide sufficient shielding measures. If sufficient actions are not taken, the controller may malfunction: [1] Where large current or high magnetic field generates [2] Where arc discharge occurs due to welding, etc. [3] Where noise generates due to electrostatic, etc. -

Connective Peripherals Pte Ltd USB to Serial Converters Manual
Connective Peripherals Pte Ltd USB to Serial Converters Manual Document Reference No.: CP_000032 Version 1.3 Issue Date: 2019-03-20 The ES-U-xxxx-x adapters are a series of USB Serial Converters from Connective Peripherals Pte Ltd. They provide a simple method of adapting legacy RS-232 or RS-422/485 devices to work with modern USB ports using a trusted and reliable FTDI chip set. Available in a variety of enclosures and port numbers, they are ideal for allowing factory automation equipment, multi-drop data collection devices, barcode readers, time clocks, scales, data entry terminals and serial communication equipment to be connected to USB ports in industrial environments. This manual covers the following USB to Serial Converter products: ES-U-1001 ES-U-1002-M ES-U-2001 ES-U-2002 ES-U-2104-M ES-U-1001-A ES-U-1004 ES-U-2001B ES-U-2002-M ES-U-2008-M ES-U-1001-M ES-U-1008 ES-U-2101 ES-U-2102 ES-U-2016-RM ES-U-1101-M ES-U-1016-RM ES-U-2101B ES-U-2102-M ES-U-3001-M ES-U-1002 ES-U-1032-RM ES-U-2101-M ES-U-2004 ES-U-3008-RM ES-U-1002-A ES-U-3016-RM Connective Peripherals Pte Ltd 178 Paya Lebar Road, #07-03 Singapore 409030 Tel.: +65 67430980 Fax: +65 68416071 E-Mail (Support): [email protected] Web: www.connectiveperipherals.com/products Neither the whole nor any part of the information contained in, or the product described in this manual, may be adapted or reproduced in any material or electronic form without the prior written consent of the copyright holder. -

Serial Communication Lab Exercise
MPS Serial Communication Lab Exercise Asynchronous & Synchronous Serial Communications Interface Student's name & ID (1): ___________________________________________________ Partner's name & ID (2): ___________________________________________________ Your Section number & TA's name __________________________________________ Notes: You must work on this assignment with your partner. Hand in a printer copy of your software listings for the team. Hand in a neat copy of your circuit schematics for the team. These will be returned to you so that they may be used for reference. ------------------------------- do not write below this line ----------------------------- POINTS TA init. (1) (2) Grade for performance verification (50% max.) Part 1 (10% max.) Part 2 (15% max.) Part 3 (25% max.) Enhancement (10% max) Grade for answers to TA's questions (20% max.) Grade for documentation and appearance (20% max.) TOTAL Grader's signature: ___________________________________________ Date: ______________________________________________________ Asynchronous & Synchronous Serial Communications Interface GOAL By doing this lab assignment, you will learn to program and use: 1. The Asynchronous Serial Communications Ports and the Synchronous Serial Peripheral Interface. 2. Serial communications among multiple processors. PREPARATION • References: C8051F12x-13x.pdf 8051 C8051F12X Reference Manual, Ch. 20, 21, 22 • Write a C program that is free from syntax errors (i.e., it should assemble without error messages). INTRODUCTION TO CONFIG2 TOOL SiLabs provides a very useful tool that simplifies various initialization routines. Start the tool by going to the Start Menu -> Silicon Laboratories -> Configuration Wizard 2. On the File menu, click New to create a new project. Under Select Device Family select C8051F12x, and then select C8051F120. This tool will produce a header file for you that will have all of the initialization routines for the various subsystems (UART, SPI, etc). -

Design of IEEE 1394B Bus Link-Layer Controller
International Journal of Research Studies in Computer Science and Engineering (IJRSCSE) Volume 2, Issue 6, June 2015, PP 1-5 ISSN 2349-4840 (Print) & ISSN 2349-4859 (Online) www.arcjournals.org Design of IEEE 1394b Bus Link-layer Controller Shuai Yang Department of Electronic Commerce Shandong Jiaotong University Jinan, China [email protected] Abstract: The IEEE 1394 bus has advantages such as high transmission speed, long transmission distance, plug and play, supporting variable transmission modes and so on. This essay mainly focuses on study link layer in the bus protocol and data transfer in asynchronous and isochronous mode, design the control chip for IEEE 1394b link layer, implements the design on RTL-level programming and verify the design through software simulation. Main work completed consists of: analyzes the protocol structure of link layer, physical layer of IEEE 1394b bus, defines the link layer control chip’s function and system structure divided into modules. Implement the design of modules with RTL programming and simulates the design in software. Keywords: IEEE 1394b, link layer, data transmission 1. INTRODUCTION Bus is a group of data cables transferring data and instructions between micro-processor and periphery devices and the core of interface part between those parts. IEEE 1394b bus is one of the main serial real-time bus standards with the advantages of high speed, long distance and plug-and- play and is widely used in connecting household computers and multimedia devices. Currently most IEEE 1394b bus communication control chip used inland are products from TI or VIA, and on the view of developing Chinese IC industry and national information safety, we should design and develop IEEE 1394 products with independent intellectual property rights. -
Hardware MIDI and USB MIDI
MIDI What’s MIDI?? It stands for Musical Instrument Digital Interface. It’s a standardized way of making electronic devices talk to each other. Any MIDI device that can send MIDI messages is called a MIDI controller. Any device that can receive messages from a MIDI controller is a MIDI instrument or MIDI-compatible device or something like that. The way all MIDI controllers and instruments talk and listen to each other in standardized to the point pretty much and MIDI controller can talk to any MIDI instrument. What’s MIDI?? MIDI is standard of sending and receiving instructions between digital controllers and digital or digitally controlled instruments. It doesn’t send audio. It looks like this on an oscilloscope. What’s MIDI?? Created in 1981-83 hardware synth and drum machine titans Ikutaro Kakehashi (Roland founder), Tom Oberheim, Sequential Circuits’ Dave Smith and others. A way of standardizing communication between the increasing number of electronic instruments with microprocessors* created by an increasing number of different companies. *microprocessors = predecessor to microcontrollers and the non-micro processors on your computer. What’s MIDI?? There’s two types of MIDI you want to know how to work with: hardware MIDI and USB MIDI. USB Midi Hardware MIDI What’s MIDI?? There’s two types of MIDI you want to know how to work with: hardware MIDI and USB MIDI. Arduino and Teensy, and probably any other common microcontroller, can send and receive hardware MIDI messages. So they can all be made into a MIDI controller or MIDI instrument, working with any commercially available hardware MIDI devices.