Laser Interferometer Gravitational Wave Observatory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Diffraction Interference Induced Superfocusing in Nonlinear Talbot Effect24,25, to Achieve Subdiffraction by Exploiting the Phases of The
OPEN Diffraction Interference Induced SUBJECT AREAS: Superfocusing in Nonlinear Talbot Effect NONLINEAR OPTICS Dongmei Liu1, Yong Zhang1, Jianming Wen2, Zhenhua Chen1, Dunzhao Wei1, Xiaopeng Hu1, Gang Zhao1, SUB-WAVELENGTH OPTICS S. N. Zhu1 & Min Xiao1,3 Received 1National Laboratory of Solid State Microstructures, College of Engineering and Applied Sciences, School of Physics, Nanjing 12 May 2014 University, Nanjing 210093, China, 2Department of Applied Physics, Yale University, New Haven, Connecticut 06511, USA, 3Department of Physics, University of Arkansas, Fayetteville, Arkansas 72701, USA. Accepted 24 July 2014 We report a simple, novel subdiffraction method, i.e. diffraction interference induced superfocusing in Published second-harmonic (SH) Talbot effect, to achieve focusing size of less than lSH/4 (or lpump/8) without 20 August 2014 involving evanescent waves or subwavelength apertures. By tailoring point spread functions with Fresnel diffraction interference, we observe periodic SH subdiffracted spots over a hundred of micrometers away from the sample. Our demonstration is the first experimental realization of the Toraldo di Francia’s proposal pioneered 62 years ago for superresolution imaging. Correspondence and requests for materials should be addressed to ocusing of a light beam into an extremely small spot with a high energy density plays an important role in key technologies for miniaturized structures, such as lithography, optical data storage, laser material nanopro- Y.Z. (zhangyong@nju. cessing and nanophotonics in confocal microscopy and superresolution imaging. Because of the wave edu.cn); J.W. F 1 nature of light, however, Abbe discovered at the end of 19th century that diffraction prohibits the visualization (jianming.wen@yale. of features smaller than half of the wavelength of light (also known as the Rayleigh diffraction limit) with optical edu) or M.X. -
Introduction to Optics Part I
Introduction to Optics part I Overview Lecture Space Systems Engineering presented by: Prof. David Miller prepared by: Olivier de Weck Revised and augmented by: Soon-Jo Chung Chart: 1 16.684 Space Systems Product Development MIT Space Systems Laboratory February 13, 2001 Outline Goal: Give necessary optics background to tackle a space mission, which includes an optical payload •Light •Interaction of Light w/ environment •Optical design fundamentals •Optical performance considerations •Telescope types and CCD design •Interferometer types •Sparse aperture array •Beam combining and Control Chart: 2 16.684 Space Systems Product Development MIT Space Systems Laboratory February 13, 2001 Examples - Motivation Spaceborne Astronomy Planetary nebulae NGC 6543 September 18, 1994 Hubble Space Telescope Chart: 3 16.684 Space Systems Product Development MIT Space Systems Laboratory February 13, 2001 Properties of Light Wave Nature Duality Particle Nature HP w2 E 2 E 0 Energy of Detector c2 wt 2 a photon Q=hQ Solution: Photons are EAeikr( ZtI ) “packets of energy” E: Electric field vector c H: Magnetic field vector Poynting Vector: S E u H 4S 2S Spectral Bands (wavelength O): Wavelength: O Q QT Ultraviolet (UV) 300 Å -300 nm Z Visible Light 400 nm - 700 nm 2S Near IR (NIR) 700 nm - 2.5 Pm Wave Number: k O Chart: 4 16.684 Space Systems Product Development MIT Space Systems Laboratory February 13, 2001 Reflection-Mirrors Mirrors (Reflective Devices) and Lenses (Refractive Devices) are both “Apertures” and are similar to each other. Law of reflection: Mirror Geometry given as Ti Ti=To a conic section rot surface: T 1 2 2 o z()U r r k 1 U Reflected wave is also k 1 in the plane of incidence Specular Circle: k=0 Ellipse -1<k<0 Reflection Parabola: k=-1 Hyperbola: k<-1 sun mirror Detectors resolve Images produced by (solar) energy reflected from detector a target scene* in Visual and NIR. -

Sub-Airy Disk Angular Resolution with High Dynamic Range in the Near-Infrared A
EPJ Web of Conferences 16, 03002 (2011) DOI: 10.1051/epjconf/20111603002 C Owned by the authors, published by EDP Sciences, 2011 Sub-Airy disk angular resolution with high dynamic range in the near-infrared A. Richichi European Southern Observatory,Karl-Schwarzschildstr. 2, 85748 Garching, Germany Abstract. Lunar occultations (LO) are a simple and effective high angular resolution method, with minimum requirements in instrumentation and telescope time. They rely on the analysis of the diffraction fringes created by the lunar limb. The diffraction phenomen occurs in space, and as a result LO are highly insensitive to most of the degrading effects that limit the performance of traditional single telescope and long-baseline interferometric techniques used for direct detection of faint, close companions to bright stars. We present very recent results obtained with the technique of lunar occultations in the near-IR, showing the detection of companions with very high dynamic range as close as few milliarcseconds to the primary star. We discuss the potential improvements that could be made, to increase further the current performance. Of course, LO are fixed-time events applicable only to sources which happen to lie on the Moon’s apparent orbit. However, with the continuously increasing numbers of potential exoplanets and brown dwarfs beign discovered, the frequency of such events is not negligible. I will list some of the most favorable potential LO in the near future, to be observed from major observatories. 1. THE METHOD The geometry of a lunar occultation (LO) event is sketched in Figure 1. The lunar limb acts as a straight diffracting edge, moving across the source with an angular speed that is the product of the lunar motion vector VM and the cosine of the contact angle CA. -

The Most Important Equation in Astronomy! 50
The Most Important Equation in Astronomy! 50 There are many equations that astronomers use L to describe the physical world, but none is more R 1.22 important and fundamental to the research that we = conduct than the one to the left! You cannot design a D telescope, or a satellite sensor, without paying attention to the relationship that it describes. In optics, the best focused spot of light that a perfect lens with a circular aperture can make, limited by the diffraction of light. The diffraction pattern has a bright region in the center called the Airy Disk. The diameter of the Airy Disk is related to the wavelength of the illuminating light, L, and the size of the circular aperture (mirror, lens), given by D. When L and D are expressed in the same units (e.g. centimeters, meters), R will be in units of angular measure called radians ( 1 radian = 57.3 degrees). You cannot see details with your eye, with a camera, or with a telescope, that are smaller than the Airy Disk size for your particular optical system. The formula also says that larger telescopes (making D bigger) allow you to see much finer details. For example, compare the top image of the Apollo-15 landing area taken by the Japanese Kaguya Satellite (10 meters/pixel at 100 km orbit elevation: aperture = about 15cm ) with the lower image taken by the LRO satellite (0.5 meters/pixel at a 50km orbit elevation: aperture = ). The Apollo-15 Lunar Module (LM) can be seen by its 'horizontal shadow' near the center of the image. -

Simple and Robust Method for Determination of Laser Fluence
Open Research Europe Open Research Europe 2021, 1:7 Last updated: 30 JUN 2021 METHOD ARTICLE Simple and robust method for determination of laser fluence thresholds for material modifications: an extension of Liu’s approach to imperfect beams [version 1; peer review: 1 approved, 2 approved with reservations] Mario Garcia-Lechuga 1,2, David Grojo 1 1Aix Marseille Université, CNRS, LP3, UMR7341, Marseille, 13288, France 2Departamento de Física Aplicada, Universidad Autónoma de Madrid, Madrid, 28049, Spain v1 First published: 24 Mar 2021, 1:7 Open Peer Review https://doi.org/10.12688/openreseurope.13073.1 Latest published: 25 Jun 2021, 1:7 https://doi.org/10.12688/openreseurope.13073.2 Reviewer Status Invited Reviewers Abstract The so-called D-squared or Liu’s method is an extensively applied 1 2 3 approach to determine the irradiation fluence thresholds for laser- induced damage or modification of materials. However, one of the version 2 assumptions behind the method is the use of an ideal Gaussian profile (revision) report that can lead in practice to significant errors depending on beam 25 Jun 2021 imperfections. In this work, we rigorously calculate the bias corrections required when applying the same method to Airy-disk like version 1 profiles. Those profiles are readily produced from any beam by 24 Mar 2021 report report report insertion of an aperture in the optical path. Thus, the correction method gives a robust solution for exact threshold determination without any added technical complications as for instance advanced 1. Laurent Lamaignere , CEA-CESTA, Le control or metrology of the beam. Illustrated by two case-studies, the Barp, France approach holds potential to solve the strong discrepancies existing between the laser-induced damage thresholds reported in the 2. -

Telescope Optics Discussion
DFM Engineering, Inc. 1035 Delaware Avenue, Unit D Longmont, Colorado 80501 Phone: 303-678-8143 Fax: 303-772-9411 Web: www.dfmengineering.com TELESCOPE OPTICS DISCUSSION: We recently responded to a Request For Proposal (RFP) for a 24-inch (610-mm) aperture telescope. The optical specifications specified an optical quality encircled energy (EE80) value of 80% within 0.6 to 0.8 arc seconds over the entire Field Of View (FOV) of 90-mm (1.2- degrees). From the excellent book, "Astronomical Optics" page 185 by Daniel J. Schroeder, we find the definition of "Encircled Energy" as "The fraction of the total energy E enclosed within a circle of radius r centered on the Point Spread Function peak". I want to emphasize the "radius r" as we will see this come up again later in another expression. The first problem with this specification is no wavelength has been specified. Perfect optics will produce an Airy disk whose "radius r" is a function of the wavelength and the aperture of the optic. The aperture in this case is 24-inches (610-mm). A typical Airy disk is shown below. This Airy disk was obtained in the DFM Engineering optical shop. Actual Airy disk of an unobstructed aperture with an intensity scan through the center in blue. Perfect optics produce an Airy disk composed of a central spot with alternating dark and bright rings due to diffraction. The Airy disk above only shows the central spot and the first bright ring, the next ring is too faint to be recorded. The first bright ring (seen above) is 63 times fainter than the peak intensity. -

What to Do with Sub-Diffraction Limit (SDL) Pixels
What To Do With Sub-Diffraction-Limit (SDL) Pixels? -- A Proposal for a Gigapixel Digital Film Sensor (DFS)* Eric R. Fossum† Abstract This paper proposes the use of sub-diffraction-limit (SDL) pixels in a new solid-state imaging paradigm – the emulation of the silver halide emulsion film process. The SDL pixels can be used in a binary mode to create a gigapixel digital film sensor (DFS). It is hoped that this paper may inspire revealing research into the potential of this paradigm shift. The relentless drive to reduce feature size in microelectronics has continued now for several decades and feature sizes have shrunk in accordance to the prediction of Gordon Moore in 1975. While the “repeal” of Moore’s Law has also been anticipated for some time, we can still confidently predict that feature sizes will continue to shrink in the near future. Using the shrinking-feature-size argument, it became clear in the early 1990’s that the opportunity to put more than 3 or 4 CCD electrodes in a single pixel would soon be upon us and from that the CMOS “active pixel” sensor concept was born. Personally, I was expecting the emergence of the “hyperactive pixel” with in-pixel signal conditioning and ADC. In fact, the effective transistor count in most CMOS image sensors has hovered in the 3-4 transistor range, and if anything, is being reduced as pixel size is shrunk by shared readout techniques. The underlying reason for pixel shrinkage is to keep sensor and optics costs as low as possible as pixel resolution grows. -

Diffraction Optics
ECE 425 CLASS NOTES – 2000 DIFFRACTION OPTICS Physical basis • Considers the wave nature of light, unlike geometrical optics • Optical system apertures limit the extent of the wavefronts • Even a “perfect” system, from a geometrical optics viewpoint, will not form a point image of a point source • Such a system is called diffraction-limited Diffraction as a linear system • Without proof here, we state that the impulse response of diffraction is the Fourier transform (squared) of the exit pupil of the optical system (see Gaskill for derivation) 207 DR. ROBERT A. SCHOWENGERDT [email protected] 520 621-2706 (voice), 520 621-8076 (fax) ECE 425 CLASS NOTES – 2000 • impulse response called the Point Spread Function (PSF) • image of a point source • The transfer function of diffraction is the Fourier transform of the PSF • called the Optical Transfer Function (OTF) Diffraction-Limited PSF • Incoherent light, circular aperture ()2 J1 r' PSF() r' = 2-------------- r' where J1 is the Bessel function of the first kind and the normalized radius r’ is given by, 208 DR. ROBERT A. SCHOWENGERDT [email protected] 520 621-2706 (voice), 520 621-8076 (fax) ECE 425 CLASS NOTES – 2000 D = aperture diameter πD πr f = focal length r' ==------- r -------- where λf λN N = f-number λ = wavelength of light λf • The first zero occurs at r = 1.22 ------ = 1.22λN , or r'= 1.22π D Compare to the course notes on 2-D Fourier transforms 209 DR. ROBERT A. SCHOWENGERDT [email protected] 520 621-2706 (voice), 520 621-8076 (fax) ECE 425 CLASS NOTES – 2000 2-D view (contrast-enhanced) “Airy pattern” central bright region, to first- zero ring, is called the “Airy disk” 1 0.8 0.6 PSF 0.4 radial profile 0.2 0 0246810 normalized radius r' 210 DR. -

Laser Beam Profile & Beam Shaping
Copyright by Priti Duggal 2006 An Experimental Study of Rim Formation in Single-Shot Femtosecond Laser Ablation of Borosilicate Glass by Priti Duggal, B.Tech. Thesis Presented to the Faculty of the Graduate School of The University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Master of Science in Engineering The University of Texas at Austin August 2006 An Experimental Study of Rim Formation in Single-Shot Femtosecond Laser Ablation of Borosilicate Glass Approved by Supervising Committee: Adela Ben-Yakar John R. Howell Acknowledgments My sincere thanks to my advisor Dr. Adela Ben-Yakar for showing trust in me and for introducing me to the exciting world of optics and lasers. Through numerous valuable discussions and arguments, she has helped me develop a scientific approach towards my work. I am ready to apply this attitude to my future projects and in other aspects of my life. I would like to express gratitude towards my reader, Dr. Howell, who gave me very helpful feedback at such short notice. My lab-mates have all positively contributed to my thesis in ways more than one. I especially thank Dan and Frederic for spending time to review the initial drafts of my writing. Thanks to Navdeep for giving me a direction in life. I am excited about the future! And, most importantly, I want to thank my parents. I am the person I am, because of you. Thank you. 11 August 2006 iv Abstract An Experimental Study of Rim Formation in Single-Shot Femtosecond Laser Ablation of Borosilicate Glass Priti Duggal, MSE The University of Texas at Austin, 2006 Supervisor: Adela Ben-Yakar Craters made on a dielectric surface by single femtosecond pulses often exhibit an elevated rim surrounding the crater. -
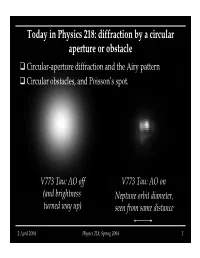
Today in Physics 218: Diffraction by a Circular Aperture Or Obstacle Circular-Aperture Diffraction and the Airy Pattern Circular Obstacles, and Poisson’S Spot
Today in Physics 218: diffraction by a circular aperture or obstacle Circular-aperture diffraction and the Airy pattern Circular obstacles, and Poisson’s spot. V773 Tau: AO off V773 Tau: AO on (and brightness Neptune orbit diameter, turned way up) seen from same distance 2 April 2004 Physics 218, Spring 2004 1 The circular aperture Most experimental situations in optics (e.g. telescopes) have circular apertures, so the application of the Kirchhoff integral to diffraction from such apertures is of particular interest. We start with a plane wave incident normally on a circular hole with radius a in an otherwise opaque screen, and ask: what is the distribution of the intensity of light on a screen a distance Ra >> away? The field in the aperture is constant, spatially: −itω ExytEeNN(,,)′′ = 0 , and the geometry is as follows: 2 April 2004 Physics 218, Spring 2004 2 xr′′= cosφ ′ x The circular aperture yr′′= sinφ ′ (continued) da′′′′= rdrdφ da’ Xq= cosΦ φ r’ Yq= sin Φ a X r y R Φ Small angles: θ q X kq cos Φ kk≅= z,Z x rr kq sin Φ k ≅ Y y r 2 April 2004 Physics 218, Spring 2004 3 The circular aperture (continued) Thus, ∞∞ eikr −+ikx′′ ky Ekkt,,= Exyte (,,)′′()xy dxdy ′′ Fxy()λr ∫∫ N −∞ −∞ a eikr = dr′′ r λr ∫ 0 2π −itω ⎛⎞ikr′ q ¥ dEφφφ′′′N0 e exp⎜⎟− () cos cosΦ+ sin sin Φ ∫ ⎝⎠r 0 ikr()−ω t a 2π EeN0 ⎛⎞ikr′ q =−−Φdr′′ r dφφ ′exp⎜⎟ cos() ′ , λrr∫∫ ⎝⎠ 00 2 April 2004 Physics 218, Spring 2004 4 The circular aperture (continued) The aperture is symmetrical about the z axis, so we expect that the answer will be independent of the “screen” azimuthal coordinate Φ; without loss of generality, then, we can take Φ = 0. -

Telescopes Light Colletors
Op#cal-infrared telescopes Light colletors Atualização: 4/5/18 AGA5802, Jorge Meléndez Ask students to mount telescope & discuss: - Diameter of the objec#ve - Angular resolu#on - Focal length (or focal distance) - Focal ra#o f/# - Angular size vs. Physical size - Field of view of CCDs - Problems with lenses and mirrors - Different loca#ons for focal plane - Mounts - Coa#ng Bibliography Kitchin – Astrophysical Techniques (5th Ed, 2009), Chap. 1 (par) Léna – Observational Astrophysics (2nd Ed, 1998), Chap. 4 (par) Birney – Observational Astronomy (2nd Ed, 2008), Chap.6 Smith – Observational Astrophysics (1995) Chap. 2 Walker – Astronomical Observations (1995), Chap. 2 e 3 www.das.inpe.br/~claudia.rodrigues/ www.if.ufrgs.br/~santiago/ www.astro.caltech.edu/~george/ ngala.as.arizona.edu/dennis/ Bibliography Roy & Clarke – Astronomy: Principles and Practice (4th Ed, 2003) Roth – Handbook of Practical Astronomy (2009), Chap. 4 Schroeder – Astronomical Optics (2nd Ed, 2000), several chaps. Lecture notes, Prof. Antonio Mário Magalhães Main characteris#cs collects energy ( ∝ collector area) image forma#on: ang ular resolu#on ● Increase in collec#ng area à detec#on of fainter object s beUer angular resolu#on Angular resolu#on Is the capacity to resolve fine details. The resolu#on is the smallest angle that could be discerned Angular resolu#on: diffrac#on of a slit Light diffraction imposes a limit on angular resolution The diffraction pattern of a slit of width d is: © Kitchin Angular resolu#on: diffrac#on of a slit -3λ/d -2λ/d -λ/d -

Understanding Lens Design Limitations
Edmund Optics USA | Asia | Europe UNDERSTANDING LENS DESIGN LIMITATIONS DIFFRACTION LIMIT Every lens has an absolute upper performance limit dictated by the laws of physics. This limitation is controlled by the working f/# of the Visit www.edmundoptics.eu/eo-imaging lens and the wavelength(s) of light that pass through the lens. Known 02/15 RIGHTS RESERVED ALL 2015 EDMUND OPTICS, INC. ® COPYRIGHT as the Diffraction Limit, this limitation is given in line pairs/mm and to request your Imaging Optics Catalog. determines the theoretical maximum resolving power of the lens. Even a perfect lens that is not limited by design will be diffraction limited. This limit is the point where two Airy patterns are no longer distinguishable Diffraction Limit = 1000 µm/mm from each other. To calculate the diffraction limit, a simple formula that f/# x wavelength (in µm) relates it to the f/# of the lens and the wavelength of light can be used (Equation 1). Learn more about f/# in our Imaging Optics Catalog. Equation 1 After the diffraction limit is reached, the lens becomes incapable of f/# 0% Contrast Limit (lp/mm) @ 0.520 µm resolving greater frequencies. The diffraction limit detailed in Table 1 shows contrast at 0% for given frequencies. These numbers may 1.4 1374 appear rather high, but are strictly theoretical – a number of other practical factors must also be considered. First, as a general rule, 2 962 imaging sensors cannot reproduce information at or near 0% contrast. 2.8 687 Due to inherent noise, contrast generally needs to be above 10% to be reliably detected on standard imaging sensors.