Variational Autoencoder for Deep Learning of Images, Labels and Captions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Disentangled Variational Auto-Encoder for Semi-Supervised Learning
Information Sciences 482 (2019) 73–85 Contents lists available at ScienceDirect Information Sciences journal homepage: www.elsevier.com/locate/ins Disentangled Variational Auto-Encoder for semi-supervised learning ∗ Yang Li a, Quan Pan a, Suhang Wang c, Haiyun Peng b, Tao Yang a, Erik Cambria b, a School of Automation, Northwestern Polytechnical University, China b School of Computer Science and Engineering, Nanyang Technological University, Singapore c College of Information Sciences and Technology, Pennsylvania State University, USA a r t i c l e i n f o a b s t r a c t Article history: Semi-supervised learning is attracting increasing attention due to the fact that datasets Received 5 February 2018 of many domains lack enough labeled data. Variational Auto-Encoder (VAE), in particu- Revised 23 December 2018 lar, has demonstrated the benefits of semi-supervised learning. The majority of existing Accepted 24 December 2018 semi-supervised VAEs utilize a classifier to exploit label information, where the param- Available online 3 January 2019 eters of the classifier are introduced to the VAE. Given the limited labeled data, learn- Keywords: ing the parameters for the classifiers may not be an optimal solution for exploiting label Semi-supervised learning information. Therefore, in this paper, we develop a novel approach for semi-supervised Variational Auto-encoder VAE without classifier. Specifically, we propose a new model called Semi-supervised Dis- Disentangled representation entangled VAE (SDVAE), which encodes the input data into disentangled representation Neural networks and non-interpretable representation, then the category information is directly utilized to regularize the disentangled representation via the equality constraint. -
A Deep Hierarchical Variational Autoencoder
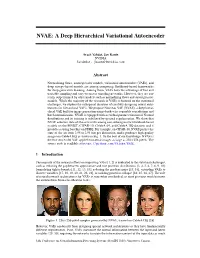
NVAE: A Deep Hierarchical Variational Autoencoder Arash Vahdat, Jan Kautz NVIDIA {avahdat, jkautz}@nvidia.com Abstract Normalizing flows, autoregressive models, variational autoencoders (VAEs), and deep energy-based models are among competing likelihood-based frameworks for deep generative learning. Among them, VAEs have the advantage of fast and tractable sampling and easy-to-access encoding networks. However, they are cur- rently outperformed by other models such as normalizing flows and autoregressive models. While the majority of the research in VAEs is focused on the statistical challenges, we explore the orthogonal direction of carefully designing neural archi- tectures for hierarchical VAEs. We propose Nouveau VAE (NVAE), a deep hierar- chical VAE built for image generation using depth-wise separable convolutions and batch normalization. NVAE is equipped with a residual parameterization of Normal distributions and its training is stabilized by spectral regularization. We show that NVAE achieves state-of-the-art results among non-autoregressive likelihood-based models on the MNIST, CIFAR-10, CelebA 64, and CelebA HQ datasets and it provides a strong baseline on FFHQ. For example, on CIFAR-10, NVAE pushes the state-of-the-art from 2.98 to 2.91 bits per dimension, and it produces high-quality images on CelebA HQ as shown in Fig. 1. To the best of our knowledge, NVAE is the first successful VAE applied to natural images as large as 256×256 pixels. The source code is available at https://github.com/NVlabs/NVAE. 1 Introduction The majority of the research efforts on improving VAEs [1, 2] is dedicated to the statistical challenges, such as reducing the gap between approximate and true posterior distributions [3, 4, 5, 6, 7, 8, 9, 10], formulating tighter bounds [11, 12, 13, 14], reducing the gradient noise [15, 16], extending VAEs to discrete variables [17, 18, 19, 20, 21, 22, 23], or tackling posterior collapse [24, 25, 26, 27]. -

A Survey on Data Collection for Machine Learning a Big Data - AI Integration Perspective
1 A Survey on Data Collection for Machine Learning A Big Data - AI Integration Perspective Yuji Roh, Geon Heo, Steven Euijong Whang, Senior Member, IEEE Abstract—Data collection is a major bottleneck in machine learning and an active research topic in multiple communities. There are largely two reasons data collection has recently become a critical issue. First, as machine learning is becoming more widely-used, we are seeing new applications that do not necessarily have enough labeled data. Second, unlike traditional machine learning, deep learning techniques automatically generate features, which saves feature engineering costs, but in return may require larger amounts of labeled data. Interestingly, recent research in data collection comes not only from the machine learning, natural language, and computer vision communities, but also from the data management community due to the importance of handling large amounts of data. In this survey, we perform a comprehensive study of data collection from a data management point of view. Data collection largely consists of data acquisition, data labeling, and improvement of existing data or models. We provide a research landscape of these operations, provide guidelines on which technique to use when, and identify interesting research challenges. The integration of machine learning and data management for data collection is part of a larger trend of Big data and Artificial Intelligence (AI) integration and opens many opportunities for new research. Index Terms—data collection, data acquisition, data labeling, machine learning F 1 INTRODUCTION E are living in exciting times where machine learning expertise. This problem applies to any novel application that W is having a profound influence on a wide range of benefits from machine learning. -

Explainable Deep Learning Models in Medical Image Analysis
Journal of Imaging Review Explainable Deep Learning Models in Medical Image Analysis Amitojdeep Singh 1,2,* , Sourya Sengupta 1,2 and Vasudevan Lakshminarayanan 1,2 1 Theoretical and Experimental Epistemology Laboratory, School of Optometry and Vision Science, University of Waterloo, Waterloo, ON N2L 3G1, Canada; [email protected] (S.S.); [email protected] (V.L.) 2 Department of Systems Design Engineering, University of Waterloo, Waterloo, ON N2L 3G1, Canada * Correspondence: [email protected] Received: 28 May 2020; Accepted: 17 June 2020; Published: 20 June 2020 Abstract: Deep learning methods have been very effective for a variety of medical diagnostic tasks and have even outperformed human experts on some of those. However, the black-box nature of the algorithms has restricted their clinical use. Recent explainability studies aim to show the features that influence the decision of a model the most. The majority of literature reviews of this area have focused on taxonomy, ethics, and the need for explanations. A review of the current applications of explainable deep learning for different medical imaging tasks is presented here. The various approaches, challenges for clinical deployment, and the areas requiring further research are discussed here from a practical standpoint of a deep learning researcher designing a system for the clinical end-users. Keywords: explainability; explainable AI; XAI; deep learning; medical imaging; diagnosis 1. Introduction Computer-aided diagnostics (CAD) using artificial intelligence (AI) provides a promising way to make the diagnosis process more efficient and available to the masses. Deep learning is the leading artificial intelligence (AI) method for a wide range of tasks including medical imaging problems. -

Double Backpropagation for Training Autoencoders Against Adversarial Attack
1 Double Backpropagation for Training Autoencoders against Adversarial Attack Chengjin Sun, Sizhe Chen, and Xiaolin Huang, Senior Member, IEEE Abstract—Deep learning, as widely known, is vulnerable to adversarial samples. This paper focuses on the adversarial attack on autoencoders. Safety of the autoencoders (AEs) is important because they are widely used as a compression scheme for data storage and transmission, however, the current autoencoders are easily attacked, i.e., one can slightly modify an input but has totally different codes. The vulnerability is rooted the sensitivity of the autoencoders and to enhance the robustness, we propose to adopt double backpropagation (DBP) to secure autoencoder such as VAE and DRAW. We restrict the gradient from the reconstruction image to the original one so that the autoencoder is not sensitive to trivial perturbation produced by the adversarial attack. After smoothing the gradient by DBP, we further smooth the label by Gaussian Mixture Model (GMM), aiming for accurate and robust classification. We demonstrate in MNIST, CelebA, SVHN that our method leads to a robust autoencoder resistant to attack and a robust classifier able for image transition and immune to adversarial attack if combined with GMM. Index Terms—double backpropagation, autoencoder, network robustness, GMM. F 1 INTRODUCTION N the past few years, deep neural networks have been feature [9], [10], [11], [12], [13], or network structure [3], [14], I greatly developed and successfully used in a vast of fields, [15]. such as pattern recognition, intelligent robots, automatic Adversarial attack and its defense are revolving around a control, medicine [1]. Despite the great success, researchers small ∆x and a big resulting difference between f(x + ∆x) have found the vulnerability of deep neural networks to and f(x). -
Generative Models
Lecture 11: Generative Models Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 1 May 9, 2019 Administrative ● A3 is out. Due May 22. ● Milestone is due next Wednesday. ○ Read Piazza post for milestone requirements. ○ Need to Finish data preprocessing and initial results by then. ● Don't discuss exam yet since people are still taking it. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 -2 May 9, 2019 Overview ● Unsupervised Learning ● Generative Models ○ PixelRNN and PixelCNN ○ Variational Autoencoders (VAE) ○ Generative Adversarial Networks (GAN) Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 3 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, regression, object detection, semantic segmentation, image captioning, etc. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 4 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Cat Goal: Learn a function to map x -> y Examples: Classification, regression, object detection, Classification semantic segmentation, image captioning, etc. This image is CC0 public domain Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 5 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, DOG, DOG, CAT regression, object detection, semantic segmentation, image Object Detection captioning, etc. This image is CC0 public domain Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 6 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, GRASS, CAT, TREE, SKY regression, object detection, semantic segmentation, image Semantic Segmentation captioning, etc. -

Infinite Variational Autoencoder for Semi-Supervised Learning
Infinite Variational Autoencoder for Semi-Supervised Learning M. Ehsan Abbasnejad Anthony Dick Anton van den Hengel The University of Adelaide {ehsan.abbasnejad, anthony.dick, anton.vandenhengel}@adelaide.edu.au Abstract with whatever labelled data is available to train a discrimi- native model for classification. This paper presents an infinite variational autoencoder We demonstrate that our infinite VAE outperforms both (VAE) whose capacity adapts to suit the input data. This the classical VAE and standard classification methods, par- is achieved using a mixture model where the mixing coef- ticularly when the number of available labelled samples is ficients are modeled by a Dirichlet process, allowing us to small. This is because the infinite VAE is able to more ac- integrate over the coefficients when performing inference. curately capture the distribution of the unlabelled data. It Critically, this then allows us to automatically vary the therefore provides a generative model that allows the dis- number of autoencoders in the mixture based on the data. criminative model, which is trained based on its output, to Experiments show the flexibility of our method, particularly be more effectively learnt using a small number of samples. for semi-supervised learning, where only a small number of The main contribution of this paper is twofold: (1) we training samples are available. provide a Bayesian non-parametric model for combining autoencoders, in particular variational autoencoders. This bridges the gap between non-parametric Bayesian meth- 1. Introduction ods and the deep neural networks; (2) we provide a semi- supervised learning approach that utilizes the infinite mix- The Variational Autoencoder (VAE) [18] is a newly in- ture of autoencoders learned by our model for prediction troduced tool for unsupervised learning of a distribution x x with from a small number of labeled examples. -
Lecture 10: Recurrent Neural Networks
Lecture 10: Recurrent Neural Networks Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 10 - 1 May 4, 2017 Administrative A1 grades will go out soon A2 is due today (11:59pm) Midterm is in-class on Tuesday! We will send out details on where to go soon Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 10 - 2 May 4, 2017 Extra Credit: Train Game More details on Piazza by early next week Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 10 - 3 May 4, 2017 Last Time: CNN Architectures AlexNet Figure copyright Kaiming He, 2016. Reproduced with permission. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 10 - 4 May 4, 2017 Last Time: CNN Architectures Softmax FC 1000 Softmax FC 4096 FC 1000 FC 4096 FC 4096 Pool FC 4096 3x3 conv, 512 Pool 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 Pool Pool 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 3x3 conv, 512 Pool Pool 3x3 conv, 256 3x3 conv, 256 3x3 conv, 256 3x3 conv, 256 Pool Pool 3x3 conv, 128 3x3 conv, 128 3x3 conv, 128 3x3 conv, 128 Pool Pool 3x3 conv, 64 3x3 conv, 64 3x3 conv, 64 3x3 conv, 64 Input Input VGG16 VGG19 GoogLeNet Figure copyright Kaiming He, 2016. Reproduced with permission. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 10 - 5 May 4, 2017 Last Time: CNN Architectures Softmax FC 1000 Pool 3x3 conv, 64 3x3 conv, 64 3x3 conv, 64 relu 3x3 conv, 64 3x3 conv, 64 F(x) + x 3x3 conv, 64 .. -

Image Retrieval Algorithm Based on Convolutional Neural Network
Advances in Intelligent Systems Research, volume 133 2nd International Conference on Artificial Intelligence and Industrial Engineering (AIIE2016) Image Retrieval Algorithm Based on Convolutional Neural Network Hailong Liu 1, 2, Baoan Li 1, 2, *, Xueqiang Lv 1 and Yue Huang 3 1Beijing Key Laboratory of Internet Culture and Digital Dissemination Research, Beijing Information Science & Technology University, Beijing 100101, China 2Computer School, Beijing Information Science and Technology University, Beijing 100101, China 3Xuanwu Hospital Capital Medical University, 100053, China *Corresponding author Abstract—With the rapid development of computer technology low, can’t meet the needs of people. In order to overcome this and the increasing of multimedia data on the Internet, how to difficulty, the researchers from the image itself, and put quickly find the desired information in the massive data becomes forward the method of image retrieval based on content. The a hot issue. Image retrieval can be used to retrieve similar images, method is to extract the visual features of the image content: and the effect of image retrieval depends on the selection of image color, texture, shape etc., the image database to be detected features to a certain extent. Based on deep learning, through self- samples for similarity matching, retrieval and sample images learning ability of a convolutional neural network to extract more are similar to the image. The main process of the method is the conducive to the high-level semantic feature of image retrieval selection and extraction of features, but there are "semantic using convolutional neural network, and then use the distance gap" [2] between low-level features and high-level semantic metric function similar image. -

Learning from Noisy Labels with Deep Neural Networks: a Survey Hwanjun Song, Minseok Kim, Dongmin Park, Yooju Shin, Jae-Gil Lee
UNDER REVIEW 1 Learning from Noisy Labels with Deep Neural Networks: A Survey Hwanjun Song, Minseok Kim, Dongmin Park, Yooju Shin, Jae-Gil Lee Abstract—Deep learning has achieved remarkable success in 100% 100% numerous domains with help from large amounts of big data. Noisy w/o. Reg. Noisy w. Reg. 75% However, the quality of data labels is a concern because of the 75% Clean w. Reg Gap lack of high-quality labels in many real-world scenarios. As noisy 50% 50% labels severely degrade the generalization performance of deep Noisy w/o. Reg. neural networks, learning from noisy labels (robust training) is 25% Accuracy Test 25% Training Accuracy Training Noisy w. Reg. becoming an important task in modern deep learning applica- Clean w. Reg tions. In this survey, we first describe the problem of learning with 0% 0% 1 30 60 90 120 1 30 60 90 120 label noise from a supervised learning perspective. Next, we pro- Epochs Epochs vide a comprehensive review of 57 state-of-the-art robust training Fig. 1. Convergence curves of training and test accuracy when training methods, all of which are categorized into five groups according WideResNet-16-8 using a standard training method on the CIFAR-100 dataset to their methodological difference, followed by a systematic com- with the symmetric noise of 40%: “Noisy w/o. Reg.” and “Noisy w. Reg.” are parison of six properties used to evaluate their superiority. Sub- the models trained on noisy data without and with regularization, respectively, sequently, we perform an in-depth analysis of noise rate estima- and “Clean w. -

LSTM-In-LSTM for Generating Long Descriptions of Images
Computational Visual Media DOI 10.1007/s41095-016-0059-z Vol. 2, No. 4, December 2016, 379–388 Research Article LSTM-in-LSTM for generating long descriptions of images Jun Song1, Siliang Tang1, Jun Xiao1, Fei Wu1( ), and Zhongfei (Mark) Zhang2 c The Author(s) 2016. This article is published with open access at Springerlink.com Abstract In this paper, we propose an approach by means of text (description generation) is a for generating rich fine-grained textual descriptions of fundamental task in artificial intelligence, with many images. In particular, we use an LSTM-in-LSTM (long applications. For example, generating descriptions short-term memory) architecture, which consists of an of images may help visually impaired people better inner LSTM and an outer LSTM. The inner LSTM understand the content of images and retrieve images effectively encodes the long-range implicit contextual using descriptive texts. The challenge of description interaction between visual cues (i.e., the spatially- generation lies in appropriately developing a model concurrent visual objects), while the outer LSTM that can effectively represent the visual cues in generally captures the explicit multi-modal relationship images and describe them in the domain of natural between sentences and images (i.e., the correspondence language at the same time. of sentences and images). This architecture is capable There have been significant advances in of producing a long description by predicting one description generation recently. Some efforts word at every time step conditioned on the previously rely on manually-predefined visual concepts and generated word, a hidden vector (via the outer LSTM), and a context vector of fine-grained visual cues (via sentence templates [1–3]. -

Introduction to Deep Learning in Signal Processing & Communications with MATLAB
Introduction to Deep Learning in Signal Processing & Communications with MATLAB Dr. Amod Anandkumar Pallavi Kar Application Engineering Group, Mathworks India © 2019 The MathWorks, Inc.1 Different Types of Machine Learning Type of Machine Learning Categories of Algorithms • Output is a choice between classes Classification (True, False) (Red, Blue, Green) Supervised Learning • Output is a real number Regression Develop predictive (temperature, stock prices) model based on both Machine input and output data Learning Unsupervised • No output - find natural groups and Clustering Learning patterns from input data only Discover an internal representation from input data only 2 What is Deep Learning? 3 Deep learning is a type of supervised machine learning in which a model learns to perform classification tasks directly from images, text, or sound. Deep learning is usually implemented using a neural network. The term “deep” refers to the number of layers in the network—the more layers, the deeper the network. 4 Why is Deep Learning So Popular Now? Human Accuracy Source: ILSVRC Top-5 Error on ImageNet 5 Vision applications have been driving the progress in deep learning producing surprisingly accurate systems 6 Deep Learning success enabled by: • Labeled public datasets • Progress in GPU for acceleration AlexNet VGG-16 ResNet-50 ONNX Converter • World-class models and PRETRAINED PRETRAINED PRETRAINED MODEL MODEL CONVERTER MODEL MODEL TensorFlow- connected community Caffe GoogLeNet IMPORTER PRETRAINED Keras Inception-v3 MODEL IMPORTER MODELS 7