Infinite Variational Autoencoder for Semi-Supervised Learning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Disentangled Variational Auto-Encoder for Semi-Supervised Learning
Information Sciences 482 (2019) 73–85 Contents lists available at ScienceDirect Information Sciences journal homepage: www.elsevier.com/locate/ins Disentangled Variational Auto-Encoder for semi-supervised learning ∗ Yang Li a, Quan Pan a, Suhang Wang c, Haiyun Peng b, Tao Yang a, Erik Cambria b, a School of Automation, Northwestern Polytechnical University, China b School of Computer Science and Engineering, Nanyang Technological University, Singapore c College of Information Sciences and Technology, Pennsylvania State University, USA a r t i c l e i n f o a b s t r a c t Article history: Semi-supervised learning is attracting increasing attention due to the fact that datasets Received 5 February 2018 of many domains lack enough labeled data. Variational Auto-Encoder (VAE), in particu- Revised 23 December 2018 lar, has demonstrated the benefits of semi-supervised learning. The majority of existing Accepted 24 December 2018 semi-supervised VAEs utilize a classifier to exploit label information, where the param- Available online 3 January 2019 eters of the classifier are introduced to the VAE. Given the limited labeled data, learn- Keywords: ing the parameters for the classifiers may not be an optimal solution for exploiting label Semi-supervised learning information. Therefore, in this paper, we develop a novel approach for semi-supervised Variational Auto-encoder VAE without classifier. Specifically, we propose a new model called Semi-supervised Dis- Disentangled representation entangled VAE (SDVAE), which encodes the input data into disentangled representation Neural networks and non-interpretable representation, then the category information is directly utilized to regularize the disentangled representation via the equality constraint. -

Predrnn: Recurrent Neural Networks for Predictive Learning Using Spatiotemporal Lstms
PredRNN: Recurrent Neural Networks for Predictive Learning using Spatiotemporal LSTMs Yunbo Wang Mingsheng Long∗ School of Software School of Software Tsinghua University Tsinghua University [email protected] [email protected] Jianmin Wang Zhifeng Gao Philip S. Yu School of Software School of Software School of Software Tsinghua University Tsinghua University Tsinghua University [email protected] [email protected] [email protected] Abstract The predictive learning of spatiotemporal sequences aims to generate future images by learning from the historical frames, where spatial appearances and temporal vari- ations are two crucial structures. This paper models these structures by presenting a predictive recurrent neural network (PredRNN). This architecture is enlightened by the idea that spatiotemporal predictive learning should memorize both spatial ap- pearances and temporal variations in a unified memory pool. Concretely, memory states are no longer constrained inside each LSTM unit. Instead, they are allowed to zigzag in two directions: across stacked RNN layers vertically and through all RNN states horizontally. The core of this network is a new Spatiotemporal LSTM (ST-LSTM) unit that extracts and memorizes spatial and temporal representations simultaneously. PredRNN achieves the state-of-the-art prediction performance on three video prediction datasets and is a more general framework, that can be easily extended to other predictive learning tasks by integrating with other architectures. 1 Introduction -
A Deep Hierarchical Variational Autoencoder
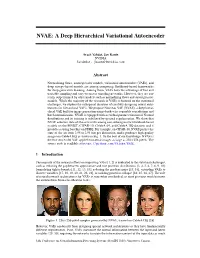
NVAE: A Deep Hierarchical Variational Autoencoder Arash Vahdat, Jan Kautz NVIDIA {avahdat, jkautz}@nvidia.com Abstract Normalizing flows, autoregressive models, variational autoencoders (VAEs), and deep energy-based models are among competing likelihood-based frameworks for deep generative learning. Among them, VAEs have the advantage of fast and tractable sampling and easy-to-access encoding networks. However, they are cur- rently outperformed by other models such as normalizing flows and autoregressive models. While the majority of the research in VAEs is focused on the statistical challenges, we explore the orthogonal direction of carefully designing neural archi- tectures for hierarchical VAEs. We propose Nouveau VAE (NVAE), a deep hierar- chical VAE built for image generation using depth-wise separable convolutions and batch normalization. NVAE is equipped with a residual parameterization of Normal distributions and its training is stabilized by spectral regularization. We show that NVAE achieves state-of-the-art results among non-autoregressive likelihood-based models on the MNIST, CIFAR-10, CelebA 64, and CelebA HQ datasets and it provides a strong baseline on FFHQ. For example, on CIFAR-10, NVAE pushes the state-of-the-art from 2.98 to 2.91 bits per dimension, and it produces high-quality images on CelebA HQ as shown in Fig. 1. To the best of our knowledge, NVAE is the first successful VAE applied to natural images as large as 256×256 pixels. The source code is available at https://github.com/NVlabs/NVAE. 1 Introduction The majority of the research efforts on improving VAEs [1, 2] is dedicated to the statistical challenges, such as reducing the gap between approximate and true posterior distributions [3, 4, 5, 6, 7, 8, 9, 10], formulating tighter bounds [11, 12, 13, 14], reducing the gradient noise [15, 16], extending VAEs to discrete variables [17, 18, 19, 20, 21, 22, 23], or tackling posterior collapse [24, 25, 26, 27]. -

Almost Unsupervised Text to Speech and Automatic Speech Recognition
Almost Unsupervised Text to Speech and Automatic Speech Recognition Yi Ren * 1 Xu Tan * 2 Tao Qin 2 Sheng Zhao 3 Zhou Zhao 1 Tie-Yan Liu 2 Abstract 1. Introduction Text to speech (TTS) and automatic speech recognition (ASR) are two popular tasks in speech processing and have Text to speech (TTS) and automatic speech recog- attracted a lot of attention in recent years due to advances in nition (ASR) are two dual tasks in speech pro- deep learning. Nowadays, the state-of-the-art TTS and ASR cessing and both achieve impressive performance systems are mostly based on deep neural models and are all thanks to the recent advance in deep learning data-hungry, which brings challenges on many languages and large amount of aligned speech and text data. that are scarce of paired speech and text data. Therefore, However, the lack of aligned data poses a ma- a variety of techniques for low-resource and zero-resource jor practical problem for TTS and ASR on low- ASR and TTS have been proposed recently, including un- resource languages. In this paper, by leveraging supervised ASR (Yeh et al., 2019; Chen et al., 2018a; Liu the dual nature of the two tasks, we propose an et al., 2018; Chen et al., 2018b), low-resource ASR (Chuang- almost unsupervised learning method that only suwanich, 2016; Dalmia et al., 2018; Zhou et al., 2018), TTS leverages few hundreds of paired data and extra with minimal speaker data (Chen et al., 2019; Jia et al., 2018; unpaired data for TTS and ASR. -

Explainable Deep Learning Models in Medical Image Analysis
Journal of Imaging Review Explainable Deep Learning Models in Medical Image Analysis Amitojdeep Singh 1,2,* , Sourya Sengupta 1,2 and Vasudevan Lakshminarayanan 1,2 1 Theoretical and Experimental Epistemology Laboratory, School of Optometry and Vision Science, University of Waterloo, Waterloo, ON N2L 3G1, Canada; [email protected] (S.S.); [email protected] (V.L.) 2 Department of Systems Design Engineering, University of Waterloo, Waterloo, ON N2L 3G1, Canada * Correspondence: [email protected] Received: 28 May 2020; Accepted: 17 June 2020; Published: 20 June 2020 Abstract: Deep learning methods have been very effective for a variety of medical diagnostic tasks and have even outperformed human experts on some of those. However, the black-box nature of the algorithms has restricted their clinical use. Recent explainability studies aim to show the features that influence the decision of a model the most. The majority of literature reviews of this area have focused on taxonomy, ethics, and the need for explanations. A review of the current applications of explainable deep learning for different medical imaging tasks is presented here. The various approaches, challenges for clinical deployment, and the areas requiring further research are discussed here from a practical standpoint of a deep learning researcher designing a system for the clinical end-users. Keywords: explainability; explainable AI; XAI; deep learning; medical imaging; diagnosis 1. Introduction Computer-aided diagnostics (CAD) using artificial intelligence (AI) provides a promising way to make the diagnosis process more efficient and available to the masses. Deep learning is the leading artificial intelligence (AI) method for a wide range of tasks including medical imaging problems. -

Double Backpropagation for Training Autoencoders Against Adversarial Attack
1 Double Backpropagation for Training Autoencoders against Adversarial Attack Chengjin Sun, Sizhe Chen, and Xiaolin Huang, Senior Member, IEEE Abstract—Deep learning, as widely known, is vulnerable to adversarial samples. This paper focuses on the adversarial attack on autoencoders. Safety of the autoencoders (AEs) is important because they are widely used as a compression scheme for data storage and transmission, however, the current autoencoders are easily attacked, i.e., one can slightly modify an input but has totally different codes. The vulnerability is rooted the sensitivity of the autoencoders and to enhance the robustness, we propose to adopt double backpropagation (DBP) to secure autoencoder such as VAE and DRAW. We restrict the gradient from the reconstruction image to the original one so that the autoencoder is not sensitive to trivial perturbation produced by the adversarial attack. After smoothing the gradient by DBP, we further smooth the label by Gaussian Mixture Model (GMM), aiming for accurate and robust classification. We demonstrate in MNIST, CelebA, SVHN that our method leads to a robust autoencoder resistant to attack and a robust classifier able for image transition and immune to adversarial attack if combined with GMM. Index Terms—double backpropagation, autoencoder, network robustness, GMM. F 1 INTRODUCTION N the past few years, deep neural networks have been feature [9], [10], [11], [12], [13], or network structure [3], [14], I greatly developed and successfully used in a vast of fields, [15]. such as pattern recognition, intelligent robots, automatic Adversarial attack and its defense are revolving around a control, medicine [1]. Despite the great success, researchers small ∆x and a big resulting difference between f(x + ∆x) have found the vulnerability of deep neural networks to and f(x). -
Generative Models
Lecture 11: Generative Models Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 1 May 9, 2019 Administrative ● A3 is out. Due May 22. ● Milestone is due next Wednesday. ○ Read Piazza post for milestone requirements. ○ Need to Finish data preprocessing and initial results by then. ● Don't discuss exam yet since people are still taking it. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 -2 May 9, 2019 Overview ● Unsupervised Learning ● Generative Models ○ PixelRNN and PixelCNN ○ Variational Autoencoders (VAE) ○ Generative Adversarial Networks (GAN) Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 3 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, regression, object detection, semantic segmentation, image captioning, etc. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 4 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Cat Goal: Learn a function to map x -> y Examples: Classification, regression, object detection, Classification semantic segmentation, image captioning, etc. This image is CC0 public domain Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 5 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, DOG, DOG, CAT regression, object detection, semantic segmentation, image Object Detection captioning, etc. This image is CC0 public domain Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 6 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, GRASS, CAT, TREE, SKY regression, object detection, semantic segmentation, image Semantic Segmentation captioning, etc. -
Self-Supervised Learning
Self-Supervised Learning Andrew Zisserman Slides from: Carl Doersch, Ishan Misra, Andrew Owens, Carl Vondrick, Richard Zhang The ImageNet Challenge Story … 1000 categories • Training: 1000 images for each category • Testing: 100k images The ImageNet Challenge Story … strong supervision The ImageNet Challenge Story … outcomes Strong supervision: • Features from networks trained on ImageNet can be used for other visual tasks, e.g. detection, segmentation, action recognition, fine grained visual classification • To some extent, any visual task can be solved now by: 1. Construct a large-scale dataset labelled for that task 2. Specify a training loss and neural network architecture 3. Train the network and deploy • Are there alternatives to strong supervision for training? Self-Supervised learning …. Why Self-Supervision? 1. Expense of producing a new dataset for each new task 2. Some areas are supervision-starved, e.g. medical data, where it is hard to obtain annotation 3. Untapped/availability of vast numbers of unlabelled images/videos – Facebook: one billion images uploaded per day – 300 hours of video are uploaded to YouTube every minute 4. How infants may learn … Self-Supervised Learning The Scientist in the Crib: What Early Learning Tells Us About the Mind by Alison Gopnik, Andrew N. Meltzoff and Patricia K. Kuhl The Development of Embodied Cognition: Six Lessons from Babies by Linda Smith and Michael Gasser What is Self-Supervision? • A form of unsupervised learning where the data provides the supervision • In general, withhold some part of the data, and task the network with predicting it • The task defines a proxy loss, and the network is forced to learn what we really care about, e.g. -

Reinforcement Learning in Supervised Problem Domains
Technische Universität München Fakultät für Informatik Lehrstuhl VI – Echtzeitsysteme und Robotik reinforcement learning in supervised problem domains Thomas F. Rückstieß Vollständiger Abdruck der von der Fakultät für Informatik der Technischen Universität München zur Erlangung des akademischen Grades eines Doktors der Naturwissenschaften (Dr. rer. nat.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr. Daniel Cremers Prüfer der Dissertation 1. Univ.-Prof. Dr. Patrick van der Smagt 2. Univ.-Prof. Dr. Hans Jürgen Schmidhuber Die Dissertation wurde am 30. 06. 2015 bei der Technischen Universität München eingereicht und durch die Fakultät für Informatik am 18. 09. 2015 angenommen. Thomas Rückstieß: Reinforcement Learning in Supervised Problem Domains © 2015 email: [email protected] ABSTRACT Despite continuous advances in computing technology, today’s brute for- ce data processing approaches may not provide the necessary advantage to win the race against the ever-growing amount of data that can be wit- nessed over the last decades. In this thesis, we discuss novel methods and algorithms that are capable of directing attention to relevant details and analysing it in sequence to overcome the processing bottleneck and to keep up with this data explosion. In the first of three parts, a novel exploration technique for Policy Gradi- ent Reinforcement Learning is presented which replaces traditional ad- ditive random exploration with state-dependent exploration, exploring on a higher, more strategic level. We will show how this new exploration method converges faster and finds better global solutions than random exploration can. The second part of this thesis will introduce the concept of “data con- sumption” and discuss means to minimise it in supervised learning tasks by deriving classification as a sequential decision process and ma- king it accessible to Reinforcement Learning methods. -

Unsupervised Speech Representation Learning Using Wavenet Autoencoders Jan Chorowski, Ron J
1 Unsupervised speech representation learning using WaveNet autoencoders Jan Chorowski, Ron J. Weiss, Samy Bengio, Aaron¨ van den Oord Abstract—We consider the task of unsupervised extraction speaker gender and identity, from phonetic content, properties of meaningful latent representations of speech by applying which are consistent with internal representations learned autoencoding neural networks to speech waveforms. The goal by speech recognizers [13], [14]. Such representations are is to learn a representation able to capture high level semantic content from the signal, e.g. phoneme identities, while being desired in several tasks, such as low resource automatic speech invariant to confounding low level details in the signal such as recognition (ASR), where only a small amount of labeled the underlying pitch contour or background noise. Since the training data is available. In such scenario, limited amounts learned representation is tuned to contain only phonetic content, of data may be sufficient to learn an acoustic model on the we resort to using a high capacity WaveNet decoder to infer representation discovered without supervision, but insufficient information discarded by the encoder from previous samples. Moreover, the behavior of autoencoder models depends on the to learn the acoustic model and a data representation in a fully kind of constraint that is applied to the latent representation. supervised manner [15], [16]. We compare three variants: a simple dimensionality reduction We focus on representations learned with autoencoders bottleneck, a Gaussian Variational Autoencoder (VAE), and a applied to raw waveforms and spectrogram features and discrete Vector Quantized VAE (VQ-VAE). We analyze the quality investigate the quality of learned representations on LibriSpeech of learned representations in terms of speaker independence, the ability to predict phonetic content, and the ability to accurately re- [17]. -

A Primer on Machine Learning
A Primer on Machine Learning By instructor Amit Manghani Question: What is Machine Learning? Simply put, Machine Learning is a form of data analysis. Using algorithms that “ continuously learn from data, Machine Learning allows computers to recognize The core of hidden patterns without actually being programmed to do so. The key aspect of Machine Learning Machine Learning is that as models are exposed to new data sets, they adapt to produce reliable and consistent output. revolves around a computer system Question: consuming data What is driving the resurgence of Machine Learning? and learning from There are four interrelated phenomena that are behind the growing prominence the data. of Machine Learning: 1) the ever-increasing volume, variety and velocity of data, 2) the decrease in bandwidth and storage costs and 3) the exponential improve- ments in computational processing. In a nutshell, the ability to perform complex ” mathematical computations on big data is driving the resurgence in Machine Learning. 1 Question: What are some of the commonly used methods of Machine Learning? Reinforce- ment Machine Learning Supervised Machine Learning Semi- supervised Machine Unsupervised Learning Machine Learning Supervised Machine Learning In Supervised Learning, algorithms are trained using labeled examples i.e. the desired output for an input is known. For example, a piece of mail could be labeled either as relevant or junk. The algorithm receives a set of inputs along with the corresponding correct outputs to foster learning. Once the algorithm is trained on a set of labeled data; the algorithm is run against the same labeled data and its actual output is compared against the correct output to detect errors. -

Variational Autoencoder for End-To-End Control of Autonomous Driving with Novelty Detection and Training De-Biasing
Variational Autoencoder for End-to-End Control of Autonomous Driving with Novelty Detection and Training De-biasing Alexander Amini1, Wilko Schwarting1, Guy Rosman2, Brandon Araki1, Sertac Karaman3, Daniela Rus1 Abstract— This paper introduces a new method for end-to- Uncertainty Estimation end training of deep neural networks (DNNs) and evaluates & Novelty Detection it in the context of autonomous driving. DNN training has Uncertainty been shown to result in high accuracy for perception to action Propagate learning given sufficient training data. However, the trained models may fail without warning in situations with insufficient or biased training data. In this paper, we propose and evaluate Encoder a novel architecture for self-supervised learning of latent variables to detect the insufficiently trained situations. Our method also addresses training data imbalance, by learning a set of underlying latent variables that characterize the training Dataset Debiasing data and evaluate potential biases. We show how these latent Weather Adjacent Road Steering distributions can be leveraged to adapt and accelerate the (Snow) Vehicles Surface Control training pipeline by training on only a fraction of the total Command Resampled data dataset. We evaluate our approach on a challenging dataset distribution for driving. The data is collected from a full-scale autonomous Unsupervised Latent vehicle. Our method provides qualitative explanation for the Variables Sample Efficient latent variables learned in the model. Finally, we show how Accelerated Training our model can be additionally trained as an end-to-end con- troller, directly outputting a steering control command for an Fig. 1: Semi-supervised end-to-end control. An encoder autonomous vehicle.