Electrohydrodynamic Stability," in Electrokinetics and Electrohydrodynamics in Microsystems (Ed
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Experimental and Computational Analysis of Bubble Generation Combining Oscillating Electric Fields and Microfluidics
Experimental and computational analysis of bubble generation combining oscillating electric fields and microfluidics A thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy By Anjana Kothandaraman Supervised by: Professor Mohan Edirisinghe And Professor Yiannis Ventikos Department of Mechanical Engineering University College London Torrington Place, London WC1E 7JE United Kingdom December, 2017 1 | P a g e Declaration I, Anjana Kothandaraman, confirm that the work presented in this thesis is my own. Where information has been derived from other sources, I confirm that this has been indicated in the thesis. -------------------------------------- Anjana Kothandaraman 2 | P a g e Abstract Microbubbles generated by microfluidic techniques have gained substantial interest in various fields such as food engineering, biosensors and the biomedical field. Recently, T-Junction geometries have been utilised for this purpose due to the exquisite control they offer over the processing parameters. However, this only relies on pressure driven flows; therefore bubble size reduction is limited, especially for very viscous solutions. The idea of combining microfluidics with electrohydrodynamics has recently been investigated using DC fields, however corona discharge was recorded at very high voltages with detrimental effects on the bubble size and stability. In order to overcome the aforementioned limitation, a novel set-up to superimpose an AC oscillation on a DC field is presented in this work with the aim of introducing additional parameters such as frequency, AC voltage and waveform type to further control bubble size, capitalising on well documented bubble resonance phenomena and properties. Firstly, the effect of applied AC voltage magnitude and the applied frequency were investigated. -
Lecture 4. Electrokinetics and Electrohydrodynamics
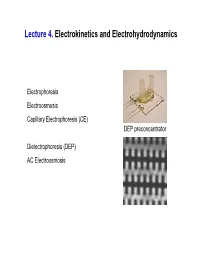
Lecture 4. Electrokinetics and Electrohydrodynamics Electrophoresis Electroosmosis Capillary Electrophoresis (CE) DEP preconcentrator Dielectrophoresis (DEP) AC Electroosmosis Electrophoresis • An ion with charge q in an electric field E moves toward opposite electrode due to Coulombic force. A steady-state speed is reached when the accelerating force equals the frictional force generated by the medium. VDC - - Medium Anode + + Cathode FE = qE FFriction = f ⋅uE = 6πηr ⋅uE q u q u = ⋅ E µ = E = E 6πηr E E 6πηr Electrophoretic mobility is a function of viscosity and charge to radius ratio. Applications of Electrophoresis • Many important biological molecules such as amino acids, peptides, proteins, nucleotides, and nucleic acids, possess ionisable groups (COOH, NH2, phosphates) and, therefore, at any given pH, exist in solution as electically charged species either as cations (+) or anions (-). DNA is negatively charged because the phosphates that form the sugar-phosphate backbone of a DNA molecule have a negative charge. • Depending on the nature of the net charge, the charged particles will migrate either to the cathode or to the anode at different rates. Electrophoresis has been applied to a variety of analytical separation problems. – Amino acids – Peptides, proteins (enzymes, hormones, antibodies) – Nucleic acids (DNA, RNA), nucleotides – Drugs, vitamins, carbohydrates – Inorganic cations and anions Gel Electrophoresis • Gel electrophoresis is a separation technique widely used for the separation of nucleic acids and proteins. The separation depends upon electrophoresis and filtering effect by gel (molecular sieve). Under electric field, charged macromolecules are forced to move through the gel with pores. • Their rates of migration depend on the field strength, size and shape of the molecules, hydrophobicity of the samples, and on the ionic strength, and pH, temperature of the buffer in which the molecules are moving. -

Electrokinetics and Electrohydrodynamics in Microsystems Invited Lecturers
TIME TABLE TIME Monday Tuesday Wednesday Thursday Friday June 22 June 23 June 24 June 25 June 26 9.00 - 9.45 Registration Morgan Mugele Bazant Chen 9.45 - 10.30 Ramos Mugele Bazant Green Chen 11.00 - 11.45 Morgan Bazant Green Chen Ramos 11.45 - 12.30 Mugele Green Chen Ramos Ramos 14.30 - 15.15 Bazant Chen Ramos Morgan 15.15 - 16.00 Green Ramos Morgan Mugele 16.30 - 17.15 Chen Green Mugele Bazant 17.15 - 18.00 Morgan e-mail: [email protected] fax +390432248550 tel. +390432248511 (6lines) 33100 Udine(Italy) -PiazzaGaribaldi18 Palazzo delTorso CISM For furtherinformationpleasecontact: our website,orcanbemaileduponrequest. Information about travel and accommodation is available on web site: e-mail: postmaster[at]daad.de tel. +49(228)882-0 DAAD, Kennedyallee50,53175Bonn support toGermanstudents.Pleasecontact: The Deutscher Akademischer Austausch Dienst (DAAD) offers to applicantsfromcountriesthatsponsorCISM. the institute cannot provide funding. Preference will be given by the head of the department or a supervisor confirming that recommendation of letter a and curriculum applicant's the with by Secretariat CISM to sent be should quests offered board and/or lodging in a reasonably priced hotel. Re centres who are not supported by their own institutions can be research and universitites from participants of number limited A The registrationfeeis600,00Euro. our secretariat. pants. If you need assistance for registration please contact A message of confirmationwill be sent to accepted partici our website: through on-line sent be should forms Application course. the of beginning the before month one least at apply must Applicants ADMISSION ANDACCOMMODATION http://www.daad.de/de/kontakt.html http://www.cism.it orbypost. -

Electrohydrodynamic Settling of Drop in Uniform Electric Field at Low and Moderate Reynolds Numbers
Electrohydrodynamic settling of drop in uniform electric field at low and moderate Reynolds numbers Nalinikanta Behera1, Shubhadeep Mandal2 and Suman Chakraborty1,a 1Department of Mechanical Engineering, Indian Institute of Technology Kharagpur, Kharagpur,West Bengal- 721302, India 2Max Planck Institute for Dynamics and Self-Organization, Am Fassberg 17, D-37077 G¨ottingen, Germany Dynamics of a liquid drop falling through a quiescent medium of another liquid is investigated in external uniform electric field. The electrohydrodynamics of a drop is governed by inherent deformability of the drop (defined by capillary number), the electric field strength (defined by Masson number) and the surface charge convection (quantified by electric Reynolds number). Surface charge convection generates nonlinearilty in a electrohydrodynamics problem by coupling the electric field and flow field. In Stokes limit, most existing theoretical models either considered weak charge convection or weak electric field to solve the problem. In the present work, gravitational settling of the drop is investigated analytically and numerically in Stokes limit considering significant electric field strength and surface charge convection. Drop deformation accurate upto higher order is calculated analytically in small deformation regime. Our theoretical results show excellent agreement with the numerical and shows improvement over previous theoretical models. For drops falling with moderate Reynolds number, the effect of Masson number on transient drop dynamics is studied for (i) perfect dielectric drop in perfect dielectric medium (ii) leaky dielectric drop in the leaky dielectric medium. For the latter case transient deformation and velocity obtained for significant charge convection is compared with that of absence in charge convection which is the novelty of our study. -

(Ehd) Pumping of Liquid Nitrogen –
ABSTRACT Title of Dissertation: ELECTROHYDRODYNAMICS (EHD) PUMPING OF LIQUID NITROGEN – APPLICATION TO SPOT CRYOGENIC COOLING OF SENSORS AND DETECTORS Mihai Rada, Doctor of Philosophy, 2004 Dissertation directed by: Professor Michael M. Ohadi Department of Mechanical Engineering Superconducting electronics require cryogenic conditions as well as certain conventional electronic applications exhibit better performance at low temperatures. A cryogenic operating environment ensures increased operating speeds and improves the signal-to-noise ratio and the bandwidth of analog devices and sensors, while also ensuring reduced aging effect. Most of these applications require modest power dissipation capabilities while having stricter requirements on the spatial and temporal temperature variations. Controlled surface cooling techniques ensure more stable and uniform temporal and spatial temperature distributions that allow better signal-to-noise ratios for sensors and elimination of hot spots for processors. EHD pumping is a promising technique that could provide pumping and mass flow rate control along the cooled surface. In this work, an ion-drag EHD pump is used to provide the pumping power necessary to ensure the cooling requirements. The present study contributes to two major areas which could provide significant improvement in electronics cooling applications. One direction concerns development of an EHD micropump, which could provide the pumping power for micro-cooling systems capable of providing more efficient and localized cooling. Using a 3M fluid, a micropump with a 50 mm gap between the emitter and collector and a saw-tooth emitter configuration at an applied voltage of about 250 V provided a pumping head of 650 Pa. For a more optimized design a combination of saw tooth emitters and a 3-D solder-bump structure should be used. -

Electrohydrodynamics of Particles and Drops in Strong Electric Fields
UC San Diego UC San Diego Electronic Theses and Dissertations Title Electrohydrodynamics of Particles and Drops in Strong Electric Fields Permalink https://escholarship.org/uc/item/335049s5 Author Das, Debasish Publication Date 2016 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA, SAN DIEGO Electrohydrodynamics of Particles and Drops in Strong Electric Fields A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Engineering Sciences (Mechanical Engineering) by Debasish Das Committee in charge: Professor David Saintillan, Chair Professor Juan C. Lasheras Professor Bo Li Professor J´er´emiePalacci Professor Daniel M. Tartakovsky 2016 Copyright Debasish Das, 2016 All rights reserved. The Dissertation of Debasish Das is approved, and it is ac- ceptable in quality and form for publication on microfilm and electronically: Chair University of California, San Diego 2016 iii EPIGRAPH If you keep proving stuff that others have done, getting confidence, increasing the complexities of your solutions - for the fun of it - then one day you’ll turn around and discover that nobody actually did that one! —Richard P. Feynman iv TABLE OF CONTENTS Signature Page................................... iii Epigraph...................................... iv Table of Contents..................................v List of Figures................................... viii List of Tables....................................x Acknowledgements................................ -
Performance Characterization of Electrohydrodynamic Propulsion
Performance Characterization of Electrohydrodynamic Propulsion Devices by Kento Masuyama Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Master of Science at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY September 2012 © Massachusetts Institute of Technology 2012. All rights reserved. Author.............................................................. Department of Aeronautics and Astronautics August 23, 2012 Certified by. Steven R.H. Barrett Assistant Professor Thesis Supervisor Accepted by . Eytan H. Modiano Professor of Aeronautics and Astronautics Chair, Graduate Program Committee 2 Performance Characterization of Electrohydrodynamic Propulsion Devices by Kento Masuyama Submitted to the Department of Aeronautics and Astronautics on August 23, 2012, in partial fulfillment of the requirements for the degree of Master of Science Abstract Partially ionized fluids can gain net momentum under an electric field, as charged par- ticles undergo momentum-transfer collisions with neutral molecules in a phenomenon termed an ionic wind. Electrohydrodynamic thrusters generate thrust by using two or more electrodes to ionize the ambient fluid and create an electric field. In this thesis, electrohydrodynamic thrusters of single- and dual-stage configurations were tested. Single-stage thrusters refer to a geometry employing one emitter electrode, an air gap of length d, and a collector electrode with large radius of curvature relative to the emitter. Dual-stage thrusters add a collinear intermediate electrode in between the emitter and collector. Single-stage thruster performance was shown to exhibit trends in agreement with the one-dimensional theory under both positive and negative DC excitations. Increasing the gap length requires a higher voltage for thrust onset, gen- erates less thrust per input voltage, generates more thrust per input current, and most importantly generates more thrust per input power. -

Electrohydrodynamics of Compound Droplet in a Microfluidic Confinement Somnath Santra , Sayan Das and Suman Chakraborty † Depa
Electrohydrodynamics of compound droplet in a microfluidic confinement Somnath Santra1, Sayan Das1 and Suman Chakraborty1,† 1Department of Mechanical Engineering, Indian Institute of Technology Kharagpur, Kharagpur, West Bengal - 721302, India The present study deals with the dynamics of a double emulsion confined in a microchannel under the presence of a uniform electric field. Towards investigating the non-trivial electrohydrodynamics of a compound droplet, confined in between two parallel plate electrodes, a phase field approach has been adopted. Under the assumption of negligible fluid inertia and small shape deformation, an asymptotic model is also developed to predict the transient as well as the steady state droplet dynamics in the limiting case of an unbounded suspending medium. The phases involved are either assumed to be perfect dielectric or leaky dielectric. Subsequent investigation shows that shape deformation of either of the interfaces of the droplet increase with rise in the channel confinement for a perfect dielectric system. However, for a leaky dielectric system, the deformation of inner droplet and outer droplet can increase or decrease with the rise in channel confinement depending on the electric properties (conductivity and permittivity) of the system. It is also observed that the presence of inner droplet for a compound droplet suppresses the breakup of the outer droplet. The present study further takes into account the effect of eccentricity of the inner droplet. Depending on the relative magnitude of the permittivity and conductivity of the system, the inner droplet, if eccentrically located, may exhibit a to and fro or a simple translational motion. It is seen that increase in the channel confinement results in a translational motion of the inner droplet thus rendering its motion independent of any electrical properties. -

Drop Electrohydrodynamics
DROP ELECTROHYDRODYNAMICS A Thesis Presented to the Faculty of the Graduate School of Cornell University in Partial Fulfillment of the Requirements for the Degree of Master of Science by Alejandro Agust´ın Carderera de Diego August 2016 c 2016 Alejandro Agust´ın Carderera de Diego ALL RIGHTS RESERVED ABSTRACT Electrohydrodynamics is the study of the interaction between fluids and electric fields, and is used to model phenomena like fuel atomization or the mixing of multiphase flows under the influence of electric fields. Increasing interest is being placed in using electric fields to vary mul- tiphase behaviour, one example is combustion processes, where finer droplets and wider sprays are created to increase engine efficiency. Another example can be seen in the pharmaceutical industry, where micro-encapsulation of com- pounds is achieved through the use of electrified coaxial liquid jets. In this work, the Ghost Fluid Method (GFM), and the Continuum Sur- face Force (CSF) approach will be used to discretize the electric potential Poisson equation for multiphase problems with arbitrary interfaces and discontinuous physical properties. A new scheme has also been derived to solve this problem, in the Finite Volume (FV) framework, and an extensive error analysis has been carried out to gauge the accuracy and properties of these schemes. These tools, coupled with NGA, the Computational Fluid Dynamics (CFD) code used in Dr. Olivier Desjardins’ research group will allow the study of, among others, the two phase mixing of two dielectric liquids under the influ- ence of an electric field, of interest to the chemical engineering industry, where an alternative non-mechanical way of mixing corrosive liquids is sought out, or the atomization of drops during fuel injection when an electric field is applied. -

Electrohydrodynamic Pumping Pressure Generation
ELECTROHYDRODYNAMIC PUMPING PRESSURE GENERATION A Major Qualifying Project Report: submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Bachelore of Science by Blair Capriotti Derek Montalvan Michal (Michelle) Talmor April 24th 2013 Approved: Professor Jamal S. Yagoobi, Advisor Professor Eduardo Torres-Jara, Co-Advisor Abstract Electrohydrodynamic (EHD) conduction pumping relies on the interaction between electric fields and dissociated charges in dielectric fluids. EHD pumps are small, have no moving parts and offer superior performance for heat transport. These pumps are therefore able to generate high mass flow rates but high pressure generation is difficult to achieve from these devices. In this Major Qualifying Project, a macro-scale, EHD conduction pump capable of generating up to 400 Pa per section was designed, built and tested. The pump is comprised of pairs of porous, 1.6mm wide high-voltage electrodes with a pore size of 10µm and 3.7mm long flush, ring ground electrodes, spaced 1.6mm apart. The space between pairs is 8mm, with 8 pairs per section. The working fluid is the Novec 7600 engineering fluid. i Special Thanks We would like to first thank our advisors, Professor Jamal Yagoobi and Professor Eduardo Torres-Jara for providing guidance during the project and for introducing us to the exciting new field of electrohydrodynamics. We would also like to thank Viral Patel and Lei Yang, two of Professor Yagoobi’s PhD students, for their immense help with designing, assembling and running the experimental setup described in this report. We would be completely lost without them. -

Interplay of Electro-Thermo-Solutal Advection and Internal Electrohydrodynamics Governed Enhanced Evaporation of Droplets
Interplay of electro-thermo-solutal advection and internal electrohydrodynamics governed enhanced evaporation of droplets Vivek Jaiswal and Purbarun Dhar Department of Mechanical Engineering, Indian Institute of Technology Ropar, Rupnagar–140001, India * Corresponding author: E–mail: [email protected]; [email protected] Phone: +91–1881– 24–2173 Abstract The present article experimentally establishes the governing influence of electric fields on the evaporation kinetics of pendant droplets of conducting liquids. It has been shown that the evaporation kinetics of pendant droplets of saline solutions can be largely augmented by the application of an external alternating electric field. The evaporation behaviour is modulated by increase in the field strength as well as the field frequency. The classical diffusion driven evaporation model is found insufficient in predicting the improved evaporation rates. The change in surface tension due to field constraint is also observed to be insufficient for explaining the observed physics. Consequently, the internal hydrodynamics of the droplet is probed employing particle image velocimetry. It is revealed that the electric field induces enhanced internal advection, which is the cause behind the improved evaporation rates. An analytical model based on scaling approach has been proposed to understand the role of internal electrohydrodynamics, electro-thermal and the electro-solutal effects. Stability maps reveal that the electrohydrodynamic advection is caused nearly equally by the electro-solutal and electro-thermal effects and are the dominant transport mechanisms within the droplet. The model is able to illustrate the influence played by the governing thermal and solutal Marangoni number, the electro-Prandtl and electro-Schmidt number, and the associated Electrohydrodynamic number. -

Electromagnetic Field Orientation and Dynamics Governs Advection Characteristics Within Pendent Droplets
Electromagnetic field orientation and dynamics governs advection characteristics within pendent droplets Purbarun Dhar a, *, Vivek Jaiswal a and A R Harikrishnan b a Department of Mechanical Engineering, Indian Institute of Technology Ropar, Rupnagar–14001, India b Department of Mechanical Engineering, Indian Institute of Technology Madras, Chennai–600036, India * Corresponding author: E–mail: [email protected] Phone: +91-1881-24-2173 Abstract The article reports the domineering governing role played by the direction of electric and magnetic fields on the internal advection pattern and strength within salt solution pendant droplets. Literature shows that solutal advection drives circulation cells within salt based droplets. Flow visualization and velocimetry reveals that the direction of the applied field governs the enhancement/reduction in circulation velocity and the directionality of circulation inside the droplet. Further, it is noted that while magnetic fields augment the circulation velocity, the electric field leads to deterioration of the same. The concepts of electro and magnetohydrodynamics are appealed to and a Stokesian stream function based mathematical model to deduce the field mediated velocities has been proposed. The model is found to reveal the roles of and degree of dependence on the governing Hartmann, Stuart, Reynolds and Masuda numbers. The theoretical predictions are observed to be in good agreement with experimental average spatio-temporal velocities. The present findings may have strong implications in microscale electro and/or magnetohydrodynamics. Keywords: Droplet; Particle Image Velocimetry; Electrohydrodynamics; Magnetohydrodynamics; Hartmann number; Masuda number Introduction – Fluid dynamics1, heat transfer2, 3 and species transport4, 5 dynamics in droplets, both pendant6, 7 as well as sessile8, 9, has been an area of immense academic importance within the research community.