Keywords List
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE and OPEN- LOOP HANDLING METRICS Robert Powell Clemson University, [email protected]
Clemson University TigerPrints All Theses Theses 1-1-2009 RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE AND OPEN- LOOP HANDLING METRICS Robert Powell Clemson University, [email protected] Follow this and additional works at: http://tigerprints.clemson.edu/all_theses Part of the Engineering Mechanics Commons Please take our one minute survey! Recommended Citation Powell, Robert, "RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE AND OPEN-LOOP HANDLING METRICS" (2009). All Theses. Paper 743. This Thesis is brought to you for free and open access by the Theses at TigerPrints. It has been accepted for inclusion in All Theses by an authorized administrator of TigerPrints. For more information, please contact [email protected]. RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE AND OPEN-LOOP HANDLING METRICS A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science Mechanical Engineering by Robert A. Powell December 2009 Accepted by: Dr. E. Harry Law, Committee Co-Chair Dr. Beshahwired Ayalew, Committee Co-Chair Dr. John Ziegert Abstract This work deals with the question of relating open-loop handling metrics to driver- in-the-loop performance (closed-loop). The goal is to allow manufacturers to reduce cost and time associated with vehicle handling development. A vehicle model was built in the CarSim environment using kinematics and compliance, geometrical, and flat track tire data. This model was then compared and validated to testing done at Michelin’s Laurens Proving Grounds using open-loop handling metrics. The open-loop tests conducted for model vali- dation were an understeer test and swept sine or random steer test. -

Multipurpose Agricultural Robot
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 06 Issue: 04 | Apr 2019 www.irjet.net p-ISSN: 2395-0072 Multipurpose Agricultural Robot Gowtham kumar S N1, Anand G Warrier2, Chirag B Shetty3, Gerard Elston Shawn D’souza4 1,2,3,4,Students, B.E, Mechanical Engineering, Alva’s Institute of Engineering & Technology, Mangalore, Karnataka. ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract leveling, water spraying.[3] These functions can be The paper presents about the multiple agricultural tasks done integrated into a single vehicle and then performed. by the single robot. To develop the efficiency of the agricultural tasks we have to find the new ways. This project deals with a novel approach for cultivating lands in very efficient way. The distinctiveness of this agriculture robot system is it is multitasking abilities which can drill, pick and place, seeding, pumping water & fertilizers, weather monitoring to work in both agriculture, afforestation and gardening platform. The project aim is design, development and the fabrication of the robot which can dig soil, put seeds, roller to close the mud and sprayer to spray water, this whole system of robot works with the help of battery and solar power. More than 40% of the population in the world chooses agriculture as the primary occupation, in recent years the development of the autonomous vehicles in the agriculture has experienced increased interest Key word : -ploughing, seeding, pick and place, Sprayer, Toggle switch, Battery, Solar panel. Fig-1: Multipurpose agricultural robot 2. REASON FOR SELECTING THE PROBLEM 1.INTRODUCTION This project objective is to fabricate a robot vehicle Agriculture is the backbone of India. -

Performance Analysis of Constant Speed Local Abstacle Avoidance Controller Using a MPC Algorithym on Granular Terrain Nicholas Haraus Marquette University
Marquette University e-Publications@Marquette Master's Theses (2009 -) Dissertations, Theses, and Professional Projects Performance Analysis of Constant Speed Local Abstacle Avoidance Controller Using a MPC Algorithym on Granular Terrain Nicholas Haraus Marquette University Recommended Citation Haraus, Nicholas, "Performance Analysis of Constant Speed Local Abstacle Avoidance Controller Using a MPC Algorithym on Granular Terrain" (2017). Master's Theses (2009 -). 443. http://epublications.marquette.edu/theses_open/443 PERFORMANCE ANALYSIS OF A CONSTANT SPEED LOCAL OBSTACLE AVOIDANCE CONTROLLER USING A MPC ALGORITHM ON GRANULAR TERRAIN by Nicholas Haraus, B.S.M.E. A Thesis submitted to the Faculty of the Graduate School, Marquette University, in Partial Fulfillment of the Requirements for the Degree of Master of Science Milwaukee, Wisconsin December 2017 ABSTRACT PERFORMANCE ANALYSIS OF A CONSTANT SPEED LOCAL OBSTACLE AVOIDANCE CONTROLLER USING A MPC ALGORITHM ON GRANULAR TERRAIN Nicholas Haraus, B.S.M.E. Marquette University, 2017 A Model Predictive Control (MPC) LIDAR-based constant speed local obstacle avoidance algorithm has been implemented on rigid terrain and granular terrain in Chrono to examine the robustness of this control method. Provided LIDAR data as well as a target location, a vehicle can route itself around obstacles as it encounters them and arrive at an end goal via an optimal route. This research is one important step towards eventual implementation of autonomous vehicles capable of navigating on all terrains. Using Chrono, a multibody physics API, this controller has been tested on a complex multibody physics HMMWV model representing the plant in this study. A penalty-based DEM approach is used to model contacts on both rigid ground and granular terrain. -

MF-Tyre/MF-Swift Copyright TNO, 2013
MF-Tyre/MF-Swift Copyright TNO, 2013 MF-Tyre/MF-Swift Dr. Antoine Schmeitz 2 Copyright TNO, 2013 Dr. Antoine Schmeitz MF-Tyre/MF-Swift Introduction TNO’s tyre modelling toolchain tyre (virtual) testing parameter fitting + tyre model signal tyre MBS database MF-Tyre processing TYDEX files property solver file MF-Swift MF-Tool Measurement Identification Simulation Copyright TNO, 2013 1 MF-Tyre/MF-Swift 3 Copyright TNO, 2013 Dr. Antoine Schmeitz MF-Tyre/MF-Swift Introduction What is MF-Tyre/MF-Swift? MF-Tyre/MF-Swift is an all-encompassing tyre model for use in vehicle dynamics simulations This means: emphasis on an accurate representation of the generated (spindle) forces tyre model is relatively fast can handle continuously varying inputs model is robust for extreme inputs model the tyre as simple as possible, but not simpler for the intended vehicle dynamics applications 4 Copyright TNO, 2013 Dr. Antoine Schmeitz MF-Tyre/MF-Swift Introduction Model usage and intended range of application All kind of vehicle handling simulations: e.g. ISO tests like steady-state cornering, lane changes, J-turn, braking, etc. Sine with Dwell, mu split, low mu, rollover, fishhook, etc. Vehicle behaviour on uneven roads: ride comfort analyses durability load calculations (fatigue spectra and load cases) Simulations with control systems, e.g. ABS, ESP, etc. Analysis of drive line vibrations Analysis of (aircraft) shimmy vibrations; typically about 10-25 Hz Used for passenger car, truck, motorcycle and aircraft tyres Copyright TNO, 2013 2 MF-Tyre/MF-Swift 5 Copyright TNO, 2013 Dr. Antoine Schmeitz MF-Tyre/MF-Swift Modelling aspects and contents (1) 1. -

Making Agriculture More Intelligent: Progress of Agricultural Robots
Review Article Robot Autom Eng J Volume 4 Issue 1 - November 2018 Copyright © All rights are reserved by Lihua Jiang DOI: 10.19080/RAEJ.2018.04.555627 Making Agriculture More Intelligent: Progress of Agricultural Robots Lihua Jiang1* and Yantao Zhang2 1Suzhou Polytechnic Institute of Agriculture, China 2School of Construction Machinery, Chang’an University, Xi’an, China Submission: November 09, 2018; Published: November 29, 2018 *Corresponding author: Lihua Jiang, Suzhou Polytechnic Institute of Agriculture, China Abstract In this paper, we present a mini review to investigate the development progress of agricultural robots from different perspectives including spraying robot, etc. are introduced with their corresponding application contexts. It is analyzed and concluded that high cost and intellectualization areclassification, two major functionality,factors that may and challengecharacteristics. the popularity The current of agricultural technical situations robots. The and development features of trendsgrafting of robot, agricultural picking robots robot, are weeding discussed robot, as well. Keywords: Agricultural Robot; Intelligent Agriculture; Grafting robot; Picking robot; Weeding robot; Spraying robot. Introduction robots, harvesting robots [6-9]. The extensive use of agricultural robots is promoting the modern agricultural production to be Robotic technology has been wide used in different areas, increasingly intensive and large-scaled. such as home service, health care, advanced manufacturing, and agricultural industry [1-4]. Agricultural robot is a kind of Classification and Features of Agricultural Robots automation equipment, which takes agricultural products as the Classification of agricultural robots operation objects with environmental perception and automated working function [5]. It is the outcome of the rapid development With the advent of the era of agricultural mechanization, many of information technology. -

The Robotanist: a Ground-Based Agricultural Robot for High-Throughput Crop Phenotyping
The Robotanist: A Ground-Based Agricultural Robot for High-Throughput Crop Phenotyping Tim Mueller-Sim, Merritt Jenkins, Justin Abel, and George Kantor Abstract— The established processes for measuring phys- iological and morphological traits (phenotypes) of crops in outdoor test plots are labor intensive and error-prone. Low-cost, reliable, field-based robotic phenotyping will enable geneticists to more easily map genotypes to phenotypes, which in turn will improve crop yields. In this paper, we present a novel robotic ground-based platform capable of autonomously navigating below the canopy of row crops such as sorghum or corn. The robot is also capable of deploying a manipulator to measure plant stalk strength and gathering phenotypic data with a modular array of non-contact sensors. We present data obtained from deployments to Sorghum bicolor test plots at various sites in South Carolina, USA. I. INTRODUCTION Plant phenotyping is a critical step in the process of breed- ing crops for higher yield, disease resistance, drought tol- erance, and other desirable traits. Plant genome researchers must empirically confirm that new cross-breeds exhibit asso- ciated phenotypes, such as stalk width, leaf area, leaf angle, and color. Unfortunately, the rate at which these associations are measured and analyzed is slower than the rate of plant genome research. Fig. 1. The Robotanist in sorghum breeding plots near Clemson, SC. This deficiency is well-recognized by the scientific com- • munity, which has deemed it the Phenotyping Bottleneck [1]. A platform capable of navigating between row crops This bottleneck is caused by a variety of factors, including and deploying phenotyping sensors for sub-canopy data labor-intensive processes, their associated costs, and the collection • necessity of replicated trials. -
Mitas Tires – Designed to Perform in Your Fields
AGRICULTURAL RADIAL TIRES Mitas Tires – DESIGNED TO PERFORM IN YOUR FIELDS • Product Information • Warranty Policy • Service After the Sale www.mitasag.com A TECHNOLOGY FOR TECHNOLOGY Agricultural technology is evolving rapidly, and today’s high-horsepower tractors and combines demand tires that can keep up with the pace. That’s why Mitas is committed to providing advanced radial tires to ensure your farming operation is expertly outfitted from the ground up. If your tires aren’t up to speed with your machinery, you may experience: • Subpar machine performance • Decreased productivity • Increased operating costs • Suboptimal crop yields • Lost profits EXPERTISE MEANS EVERYTHING Given the high stakes and rewards of your operation, would you rather buy your tires from a manufacturer that dabbles in agriculture or one that focuses all its resources solely on agricultural and off-road tires? At Mitas, agriculture alone accounts for 70 percent of our global business. When you purchase Mitas premium-grade agricultural radial tires, you can be confident they are engineered and manufactured to exacting standards for superior quality, durability and performance. 1 Table of Contents Tire applications .............................................................................3 List of tire sizes ...............................................................................5 SuperFlexionTire (SFT) .................................................................7 Combine drive tires: AC 70 H / G / N and SuperFlexionTire (SFT) .................................................. -
2019 AIM Program
A Message from ASABE President Maury Salz Welcome to the 2019 Annual International Meeting (AIM) of the American Society of Agricultural and Biological Engineers in Boston, Massachusetts. I extend a special welcome to first time participants, international attendees and pre-professionals. I am confident you will find the meeting a welcoming and stimulating investment of your time. AIM offers a wide array of opportunities for you to gain knowledge in technical sessions, make new or catch-up with old friends at social events, contribute to the ongoing growth efforts in technical communities, and to celebrate the accomplishments of peers in the awards ceremonies. I highly encourage you to engage in the opening keynote session by GreenBiz’s Joel Makower and the following panel discussion on sustainability and the need for a national strategy, which could alter how we live. We as individuals, and collectively as ASABE, will be challenged to think about how this broader vision of sustainability could fundamentally change our lives and the profession. I want to thank our friends at Cornell University for serving as local hosts and the volunteer coordinators. Students work as volunteers to enhance the experience for all meeting participants and you can locate them by their blue shirts. Please thank them when you have the chance. Boston is rich in history and be sure to take some time to experience what this unique area has to offer. I also encourage you to participate actively in AIM and reflect on how you can advance the Society goals to benefit yourself personally and the people of the world. -

Agricultural Robot: Intelligent Robot for Farming
IARJSET ISSN (Online) 2393-8021 ISSN (Print) 2394-1588 International Advanced Research Journal in Science, Engineering and Technology ISO 3297:2007 Certified Vol. 3, Issue 8, August 2016 Agricultural Robot: Intelligent Robot for Farming Nidhi Agarwal1, Ritula Thakur2 M.E. Student, Department of Electrical Engineering, NIITTTR, Chandigarh1 Assistant Professor, Department of Electrical Engineering, NIITTTR, Chandigarh2 Abstract: With the advancement of science and recent technologies the attention of scientist is getting directed towards two field – Farming and Robotics System. But the combination of two technologies can serve efficiently for many problems by overcoming the limitation of previous technologies. Robotics technologies alone serve very well for the various problems in the field of engineering, medical, military, industry evolution and other various areas of development and requirements, but here we pile together the new advancement in agriculture with robotics to develop the agriculture system which can be used in more complex dynamic systems. This technology provides optimum and efficient solution for wide ranges of production with their merits and demerits. This robotic system is named as agricultural robot. This paper provides a detail review of the Robot. Keywords: Movement, Agricultural robot, Arduino, Robot Architecture, Agricultural Functions. I. INTRODUCTION Farmers are the backbone for food production. In India, with the help of different computation algorithm. The about 56% people are dependent upon agriculture to earn improved specification helps to design, smartly control, livelihood as shown in the figure (Fig. 1). But technical and to make agriculture safe and suitable for everyone. In advancement in agriculture is lesser as compared to other this paper the author suggested that robot will start seeding field. -

Summer, All-Season and Winter Tyres 2018 Passenger Car and Van
SUMMER, ALL-SEASON AND WINTER TYRES 2018 PASSENGER CAR AND VAN SPORTY. STRONG. SAFE! Viking. A brand of Continental. SUMMER TYRES 2018 SPORTY. STRONG. SAFE! Viking is a brand of Continental, developed in Germany and manufactured in Europe. With more than 80 years of experience ProTech HP CityTech II TransTech II as a European tyre manufacturer and the continuous further development of For middle-class vehicles For compact- and For transporter our products in state-of-the-art develop- and executive cars. middle-class cars. and vans. ment centres, Viking stands for cutting- edge technology. Convincing ALL-SEASON & WINTER TYRES 2017/18 quality features Sporty: Outstanding performance, even for powerful vehicles Strong: Durable products which deliver even in demanding conditions FourTech FourTech Van WinTech WinTech Van Safe: For compact- and For transporter For compact- and For transporter Reliable protection due to state-of-the- middle-class cars. and vans. middle-class cars. and vans. art technology 2 3 ProTech HP The UHP tyre CityTech II The compact tyre The well balanced high performance tyre The CityTech II is an economical attractive tyre with sporting capabilities. with low rolling resistance and high mileage. For middle-class vehicles and executive cars. For compact-class and middle-class vehicles. Technical highlights Technical highlights Exemplary handling in dry conditions. Improved protection against aquaplaning. The closed outer shoulder of the tyre increases the The modern lateral groove system in the tread transverse rigidity and enlarges the area in contact grooves means that water is effectively channelled with the road. This results in exemplary handling in from the contact area in the middle to the large dry conditions and improves the transfer of forces, circumferential grooves. -

Mechanical Analyses of Multi-Piece Mining Vehicle Wheels to Enhance Safety
University of Windsor Scholarship at UWindsor Electronic Theses and Dissertations Theses, Dissertations, and Major Papers 2014 Mechanical Analyses of Multi-piece Mining Vehicle Wheels to Enhance Safety Zhanbiao Li University of Windsor Follow this and additional works at: https://scholar.uwindsor.ca/etd Recommended Citation Li, Zhanbiao, "Mechanical Analyses of Multi-piece Mining Vehicle Wheels to Enhance Safety" (2014). Electronic Theses and Dissertations. 5197. https://scholar.uwindsor.ca/etd/5197 This online database contains the full-text of PhD dissertations and Masters’ theses of University of Windsor students from 1954 forward. These documents are made available for personal study and research purposes only, in accordance with the Canadian Copyright Act and the Creative Commons license—CC BY-NC-ND (Attribution, Non-Commercial, No Derivative Works). Under this license, works must always be attributed to the copyright holder (original author), cannot be used for any commercial purposes, and may not be altered. Any other use would require the permission of the copyright holder. Students may inquire about withdrawing their dissertation and/or thesis from this database. For additional inquiries, please contact the repository administrator via email ([email protected]) or by telephone at 519-253-3000ext. 3208. Mechanical Analyses of Multi-piece Mining Vehicle Wheels to Enhance Safety By Zhanbiao Li A Dissertation Submitted to the Faculty of Graduate Studies through Mechanical, Automotive, and Materials Engineering Department in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy at the University of Windsor Windsor, Ontario, Canada 2014 © 2014 Zhanbiao Li Mechanical Analyses of Multi-piece Mining Vehicle Wheels to Enhance Safety By Zhanbiao Li APPROVED BY: __________________________________________________ Dr. -
Tire Building Drum Having Independently Expandable Center and End Sections
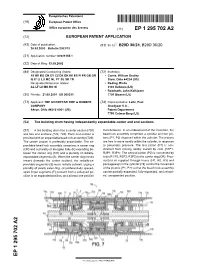
Europäisches Patentamt *EP001295702A2* (19) European Patent Office Office européen des brevets (11) EP 1 295 702 A2 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.7: B29D 30/24, B29D 30/20 26.03.2003 Bulletin 2003/13 (21) Application number: 02021255.1 (22) Date of filing: 19.09.2002 (84) Designated Contracting States: (72) Inventors: AT BE BG CH CY CZ DE DK EE ES FI FR GB GR • Currie, William Dudley IE IT LI LU MC NL PT SE SK TR Stow, Ohio 44224 (US) Designated Extension States: • Reding, Emile AL LT LV MK RO SI 9163 Kehmen (LU) • Roedseth, John Kolbjoern (30) Priority: 21.09.2001 US 960211 7790 Bissen (LU) (71) Applicant: THE GOODYEAR TIRE & RUBBER (74) Representative: Leitz, Paul COMPANY Goodyear S.A., Akron, Ohio 44316-0001 (US) Patent-Department 7750 Colmar-Berg (LU) (54) Tire building drum having independently expandable center and end sections (57) A tire building drum has a center section (720) therebetween. In an embodiment of the invention, the and two end sections (722, 724). Each end section is bead lock assembly comprises a cylinder and two pis- provided with an expandable bead lock assembly (726). tons (P1, P2) disposed within the cylinder. The pistons The center section is preferably expandable. The ex- are free to move axially within the cylinder, in response pandable bead lock assembly comprises a carrier ring to pneumatic pressure. The first piston (P1) is con- (CR) and a plurality of elongate links (K) extending be- strained from moving axially inward by rods (R1P1, tween the carrier ring (CR) and a plurality of radially- R2P1, R3P1).